Rao-Blackwellized Particle Smoothing for Simultaneous Localization and Mapping

0
👀
Sign in to get full access
Overview
- Simultaneous localization and mapping (SLAM) is the task of building a map of an unknown environment while also using that map to determine the position of the mapping device.
- SLAM can be approached probabilistically, allowing for the incorporation of prior knowledge and operation under uncertainty.
- Rather than computing point estimates of the system states, this paper captures the full posterior density through approximate Bayesian inference.
- The paper introduces a framework for probabilistic SLAM using particle smoothing, which can correct for past drift and ambiguities in both the map and the states.
Plain English Explanation
Imagine you're lost in a dark, unfamiliar room and need to find your way out. To do this, you could start by feeling around the room and creating a mental map of the space - the location of walls, furniture, and any exits. At the same time, you'd be using that map to figure out where you are and how to get to the door.
This is essentially what simultaneous localization and mapping (SLAM) does, but using sensors instead of your hands. A SLAM system can build a digital map of an unknown environment while also determining its own position within that map. This is a challenging task, as the map and the position are constantly being updated and refined based on new information.
Rather than just guessing at the map and position, this paper proposes a probabilistic approach to SLAM. Instead of trying to find a single, definitive answer, the system captures the full range of possible maps and positions, and how likely each one is. This allows it to incorporate prior knowledge and handle uncertainty more effectively.
The key innovation in this paper is the use of a technique called particle smoothing. Instead of just looking at the current state, particle smoothing also goes back and corrects past mistakes in the map and the position estimates. This helps the system avoid getting stuck in local errors or ambiguities.
The paper shows how this approach can work for different types of SLAM, including magnetic field, visual, and radio-based systems. The techniques are general, efficient, and can handle a range of noisy and confounding conditions.
Technical Explanation
The paper proposes a probabilistic framework for simultaneous localization and mapping (SLAM) that uses particle smoothing to correct for past drift and ambiguities in both the map and the state estimates.
Rather than computing point estimates of the system states, the authors capture the full posterior density through approximate Bayesian inference. This allows them to incorporate prior knowledge and operate under uncertainty.
The key innovation is the use of particle smoothing, which not only incorporates observed data in current state estimates, but also back-tracks the updated knowledge to correct for past errors. This helps the system avoid getting stuck in local minima or ambiguities.
The framework can efficiently handle both dense and sparse map representations by Rao-Blackwellization of conditionally linear and conditionally linearized models. The authors demonstrate the approach on magnetic field, visual, and radio-based SLAM systems, showing that it is general, efficient, and robust to confounding noise.
Critical Analysis
The paper presents a novel and promising approach to probabilistic SLAM, but there are a few potential limitations and areas for further research:
-
The authors note that the particle smoothing approach can be computationally intensive, especially for high-dimensional state spaces. Further optimization or approximation techniques may be needed to scale the method to larger, more complex environments.
-
The paper focuses on simulations and small-scale real-world experiments. More extensive evaluation in larger, more realistic environments would be helpful to better understand the strengths and weaknesses of the approach.
-
The paper does not address the potential for systematic biases or errors in the sensor data, which could lead to persistent errors in the map and state estimates. Incorporating more robust sensor models or techniques for detecting and mitigating such biases could be an important area for future research.
-
The paper does not discuss the implications of the probabilistic SLAM approach for applications that require deterministic, high-precision localization and mapping, such as autonomous navigation or augmented reality. Further research may be needed to understand the trade-offs and best use cases for this type of approach.
Overall, the paper presents a thoughtful and innovative approach to probabilistic SLAM that could have significant implications for a wide range of applications. However, as with any research, there are opportunities for further refinement and exploration.
Conclusion
This paper introduces a probabilistic framework for simultaneous localization and mapping (SLAM) that uses particle smoothing to correct for past errors and uncertainties in both the map and the system state estimates. By capturing the full posterior density through Bayesian inference, the approach can incorporate prior knowledge and handle noisy or confounding sensor data more effectively than traditional point-based estimation methods.
The authors demonstrate the generality and efficiency of their approach on magnetic field, visual, and radio-based SLAM systems, showing its potential to advance the state-of-the-art in a wide range of applications. While there are some limitations and areas for further research, this paper represents an important contribution to the field of SLAM and probabilistic state estimation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👀
0
Rao-Blackwellized Particle Smoothing for Simultaneous Localization and Mapping
Manon Kok, Arno Solin, Thomas B. Schon
Simultaneous localization and mapping (SLAM) is the task of building a map representation of an unknown environment while at the same time using it for positioning. A probabilistic interpretation of the SLAM task allows for incorporating prior knowledge and for operation under uncertainty. Contrary to the common practice of computing point estimates of the system states, we capture the full posterior density through approximate Bayesian inference. This dynamic learning task falls under state estimation, where the state-of-the-art is in sequential Monte Carlo methods that tackle the forward filtering problem. In this paper, we introduce a framework for probabilistic SLAM using particle smoothing that does not only incorporate observed data in current state estimates, but it also back-tracks the updated knowledge to correct for past drift and ambiguities in both the map and in the states. Our solution can efficiently handle both dense and sparse map representations by Rao-Blackwellization of conditionally linear and conditionally linearized models. We show through simulations and real-world experiments how the principles apply to radio (BLE/Wi-Fi), magnetic field, and visual SLAM. The proposed solution is general, efficient, and works well under confounding noise.
Read more6/6/2024
🛠️
0
SLAM for Indoor Mapping of Wide Area Construction Environments
Vincent Ress, Wei Zhang, David Skuddis, Norbert Haala, Uwe Soergel
Simultaneous localization and mapping (SLAM), i.e., the reconstruction of the environment represented by a (3D) map and the concurrent pose estimation, has made astonishing progress. Meanwhile, large scale applications aiming at the data collection in complex environments like factory halls or construction sites are becoming feasible. However, in contrast to small scale scenarios with building interiors separated to single rooms, shop floors or construction areas require measures at larger distances in potentially texture less areas under difficult illumination. Pose estimation is further aggravated since no GNSS measures are available as it is usual for such indoor applications. In our work, we realize data collection in a large factory hall by a robot system equipped with four stereo cameras as well as a 3D laser scanner. We apply our state-of-the-art LiDAR and visual SLAM approaches and discuss the respective pros and cons of the different sensor types for trajectory estimation and dense map generation in such an environment. Additionally, dense and accurate depth maps are generated by 3D Gaussian splatting, which we plan to use in the context of our project aiming on the automatic construction and site monitoring.
Read more4/29/2024
📈
0
New!Data-Driven Batch Localization and SLAM Using Koopman Linearization
Zi Cong Guo, Frederike Dumbgen, James R. Forbes, Timothy D. Barfoot
We present a framework for model-free batch localization and SLAM. We use lifting functions to map a control-affine system into a high-dimensional space, where both the process model and the measurement model are rendered bilinear. During training, we solve a least-squares problem using groundtruth data to compute the high-dimensional model matrices associated with the lifted system purely from data. At inference time, we solve for the unknown robot trajectory and landmarks through an optimization problem, where constraints are introduced to keep the solution on the manifold of the lifting functions. The problem is efficiently solved using a sequential quadratic program (SQP), where the complexity of an SQP iteration scales linearly with the number of timesteps. Our algorithms, called Reduced Constrained Koopman Linearization Localization (RCKL-Loc) and Reduced Constrained Koopman Linearization SLAM (RCKL-SLAM), are validated experimentally in simulation and on two datasets: one with an indoor mobile robot equipped with a laser rangefinder that measures range to cylindrical landmarks, and one on a golf cart equipped with RFID range sensors. We compare RCKL-Loc and RCKL-SLAM with classic model-based nonlinear batch estimation. While RCKL-Loc and RCKL-SLAM have similar performance compared to their model-based counterparts, they outperform the model-based approaches when the prior model is imperfect, showing the potential benefit of the proposed data-driven technique.
Read more9/17/2024
0
MGS-SLAM: Monocular Sparse Tracking and Gaussian Mapping with Depth Smooth Regularization
Pengcheng Zhu, Yaoming Zhuang, Baoquan Chen, Li Li, Chengdong Wu, Zhanlin Liu
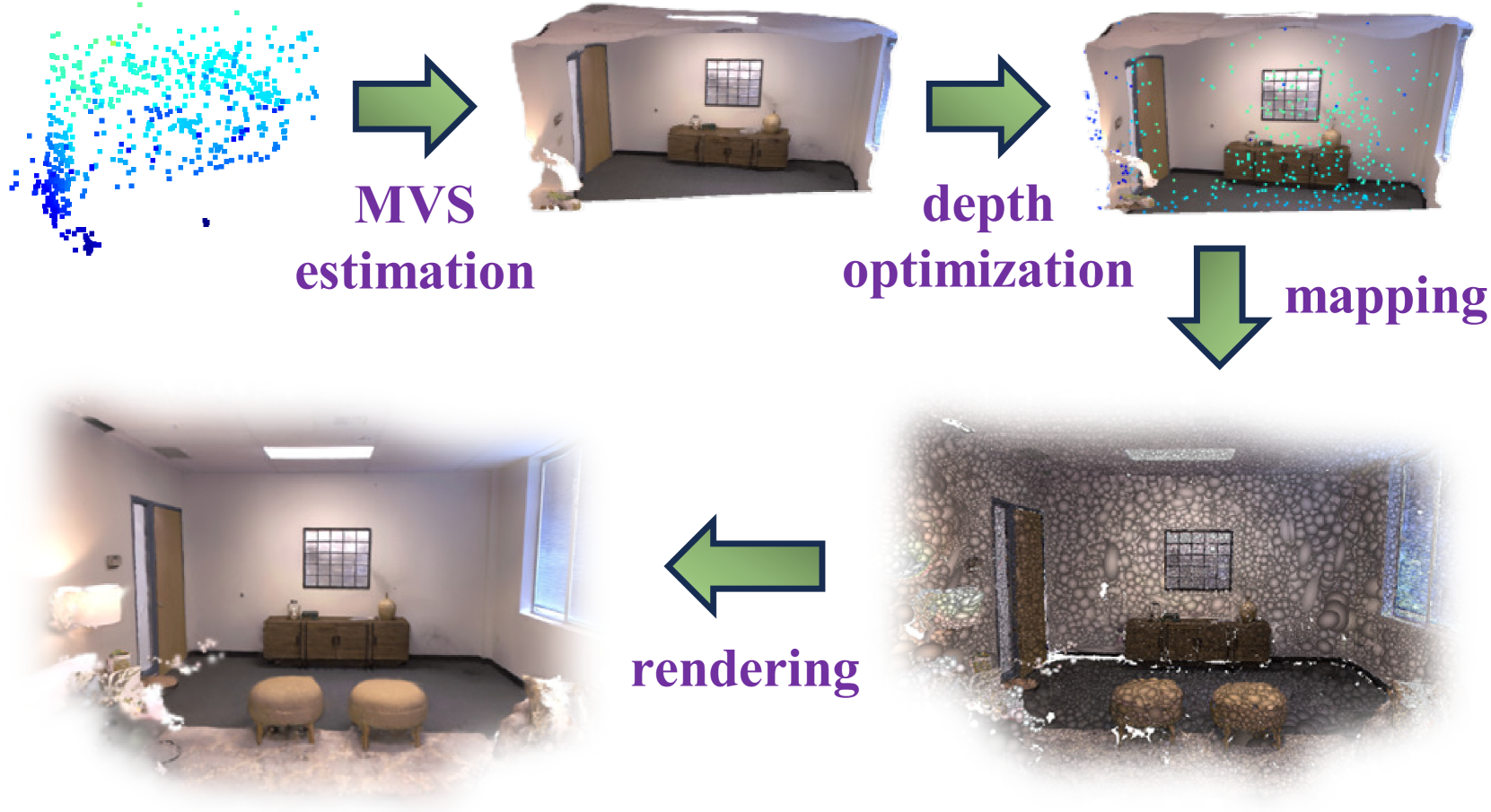
This letter introduces a novel framework for dense Visual Simultaneous Localization and Mapping (VSLAM) based on Gaussian Splatting. Recently, SLAM based on Gaussian Splatting has shown promising results. However, in monocular scenarios, the Gaussian maps reconstructed lack geometric accuracy and exhibit weaker tracking capability. To address these limitations, we jointly optimize sparse visual odometry tracking and 3D Gaussian Splatting scene representation for the first time. We obtain depth maps on visual odometry keyframe windows using a fast Multi-View Stereo (MVS) network for the geometric supervision of Gaussian maps. Furthermore, we propose a depth smooth loss and Sparse-Dense Adjustment Ring (SDAR) to reduce the negative effect of estimated depth maps and preserve the consistency in scale between the visual odometry and Gaussian maps. We have evaluated our system across various synthetic and real-world datasets. The accuracy of our pose estimation surpasses existing methods and achieves state-of-the-art. Additionally, it outperforms previous monocular methods in terms of novel view synthesis and geometric reconstruction fidelities.
Read more9/11/2024