Real-Time Distributed Infrastructure-free Searching and Target Tracking via Virtual Pheromones
2311.13035
0
0
🛸
Abstract
Actively searching for targets using a multi-agent system in an unknown environment poses a two-pronged problem, where on the one hand we need agents to cover as much of the environment as possible with little overlap and on the other hand the agents must coordinate among themselves to select and track targets thereby maximizing detection performance. This paper proposes a fully distributed solution for an ad hoc network of agents to cooperatively search for targets and monitor them in an unknown infrastructure-free environment. The solution combines a distributed pheromone-based coverage control strategy with a distributed target selection mechanism. We further expand the scope to show the implementation of the proposed algorithm on a Lighter Than Air (LTA) multi-robotic system that can search and track objects in priori unknown locations.
Create account to get full access
Overview
- Searching for targets in an unknown environment with multiple agents is challenging due to:
- Need for effective coverage to avoid overlap
- Coordination required among agents to detect and monitor targets
- The paper proposes a distributed solution for an ad hoc network of agents to cooperatively search and track targets in unknown environments.
- It combines a pheromone-based coverage control strategy with a distributed target selection mechanism.
- The algorithm is implemented on a Lighter Than Air (LTA) multi-robotic system for searching and tracking objects at unknown locations.
Plain English Explanation
Imagine a team of search and rescue robots tasked with finding missing persons in a large, unexplored area. The robots must work together efficiently, covering as much ground as possible without duplicating efforts. Additionally, they need to communicate and coordinate their actions once a target is located to monitor and track its movements.
The proposed solution is like a well-coordinated ant colony. Each robot leaves a virtual trail (pheromone) as it explores, allowing others to avoid already-covered areas. When a target is detected, the robots use a decentralized decision-making process to determine which ones should focus on tracking that target while the remaining robots continue searching.
This approach enables the robots to divide and conquer the unknown territory autonomously, without a central command center dictating their actions. It's like a self-organizing swarm, constantly adapting to new information and making collective decisions on the fly.
Technical Explanation
The research proposes a fully distributed algorithm for multi-agent target search and tracking in unknown environments without pre-existing infrastructure. The solution comprises two key components:
-
Distributed Pheromone-based Coverage Control Strategy: Agents deposit virtual pheromone trails as they explore the environment, allowing others to avoid already-covered areas and improve overall coverage efficiency.
-
Distributed Target Selection Mechanism: When a target is detected, agents use a decentralized decision-making process to determine which subset should focus on tracking that target while the remaining agents continue the search.
The algorithm was implemented on a Lighter Than Air (LTA) multi-robotic system, consisting of autonomous aerial vehicles capable of searching and tracking objects in unknown locations.
Critical Analysis
While the proposed solution offers a promising approach to autonomous target search and tracking, there are several potential limitations and areas for further research:
-
Scalability: The paper does not address the scalability of the system to larger numbers of agents or more complex environments. As the number of agents and targets increases, the decentralized coordination and decision-making processes may become more challenging.
-
Obstacle Avoidance: The paper does not explicitly discuss obstacle avoidance or navigation in cluttered environments. In real-world scenarios, agents may need to navigate around obstacles while maintaining efficient coverage and coordination.
-
Communication Constraints: The proposed solution assumes reliable communication among agents. In practice, communication links may be intermittent or limited in range, potentially affecting coordination and target tracking performance.
-
Target Dynamics: The paper focuses on stationary or slowly moving targets. Additional research may be needed to adapt the system for tracking highly dynamic targets or targets exhibiting complex motion patterns.
-
Robustness and Fault Tolerance: The paper does not address the system's robustness to agent failures or errors. Mechanisms for fault detection, isolation, and recovery may be necessary for practical deployment in critical applications.
While the research presents an innovative approach to multi-agent target search and tracking, it is important to critically evaluate its limitations and consider potential improvements or extensions to address real-world challenges.
Conclusion
The proposed distributed solution offers a promising approach to cooperative target search and tracking in unknown environments using a team of autonomous agents. By combining pheromone-based coverage control with decentralized target selection, the system enables efficient exploration and coordination without the need for a central command structure.
The implementation on a Lighter Than Air multi-robotic platform demonstrates the practical applicability of the algorithm in real-world scenarios, such as search and rescue operations or environmental monitoring.
While the research presents a novel solution, it also highlights the need for further investigation into scalability, obstacle avoidance, communication constraints, target dynamics, and system robustness. Addressing these limitations could pave the way for more advanced and resilient multi-agent systems capable of tackling complex search and tracking challenges in dynamic and unpredictable environments.
Overall, this research contributes to the growing field of distributed multi-agent systems and highlights the potential of autonomous coordination and decision-making in unknown environments, with implications for various applications, including disaster response, surveillance, and exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Multi-Robot Target Tracking with Sensing and Communication Danger Zones
Jiazhen Liu, Peihan Li, Yuwei Wu, Gaurav S. Sukhatme, Vijay Kumar, Lifeng Zhou
0
0
Multi-robot target tracking finds extensive applications in different scenarios, such as environmental surveillance and wildfire management, which require the robustness of the practical deployment of multi-robot systems in uncertain and dangerous environments. Traditional approaches often focus on the performance of tracking accuracy with no modeling and assumption of the environments, neglecting potential environmental hazards which result in system failures in real-world deployments. To address this challenge, we investigate multi-robot target tracking in the adversarial environment considering sensing and communication attacks with uncertainty. We design specific strategies to avoid different danger zones and proposed a multi-agent tracking framework under the perilous environment. We approximate the probabilistic constraints and formulate practical optimization strategies to address computational challenges efficiently. We evaluate the performance of our proposed methods in simulations to demonstrate the ability of robots to adjust their risk-aware behaviors under different levels of environmental uncertainty and risk confidence. The proposed method is further validated via real-world robot experiments where a team of drones successfully track dynamic ground robots while being risk-aware of the sensing and/or communication danger zones.
6/24/2024

An Active Search Strategy with Multiple Unmanned Aerial Systems for Multiple Targets
Chuanxiang Gao, Xinyi Wang, Xi Chen, Ben M. Chen
0
0
The challenge of efficient target searching in vast natural environments has driven the need for advanced multi-UAV active search strategies. This paper introduces a novel method in which global and local information is adeptly merged to avoid issues such as myopia and redundant back-and-forth movements. In addition, a trajectory generation method is used to ensure the search pattern within continuous space. To further optimize multi-agent cooperation, the Voronoi partition technique is employed, ensuring a reduction in repetitive flight patterns and making the control of multiple agents in a decentralized way. Through a series of experiments, the evaluation and comparison results demonstrate the efficiency of our approach in various environments. The primary application of this innovative approach is demonstrated in the search for horseshoe crabs within their wild habitats, showcasing its potential to revolutionize ecological survey and conservation efforts.
6/26/2024
Distributed maze exploration using multiple agents and optimal goal assignment
Manousos Linardakis, Iraklis Varlamis, Georgios Th. Papadopoulos
0
0
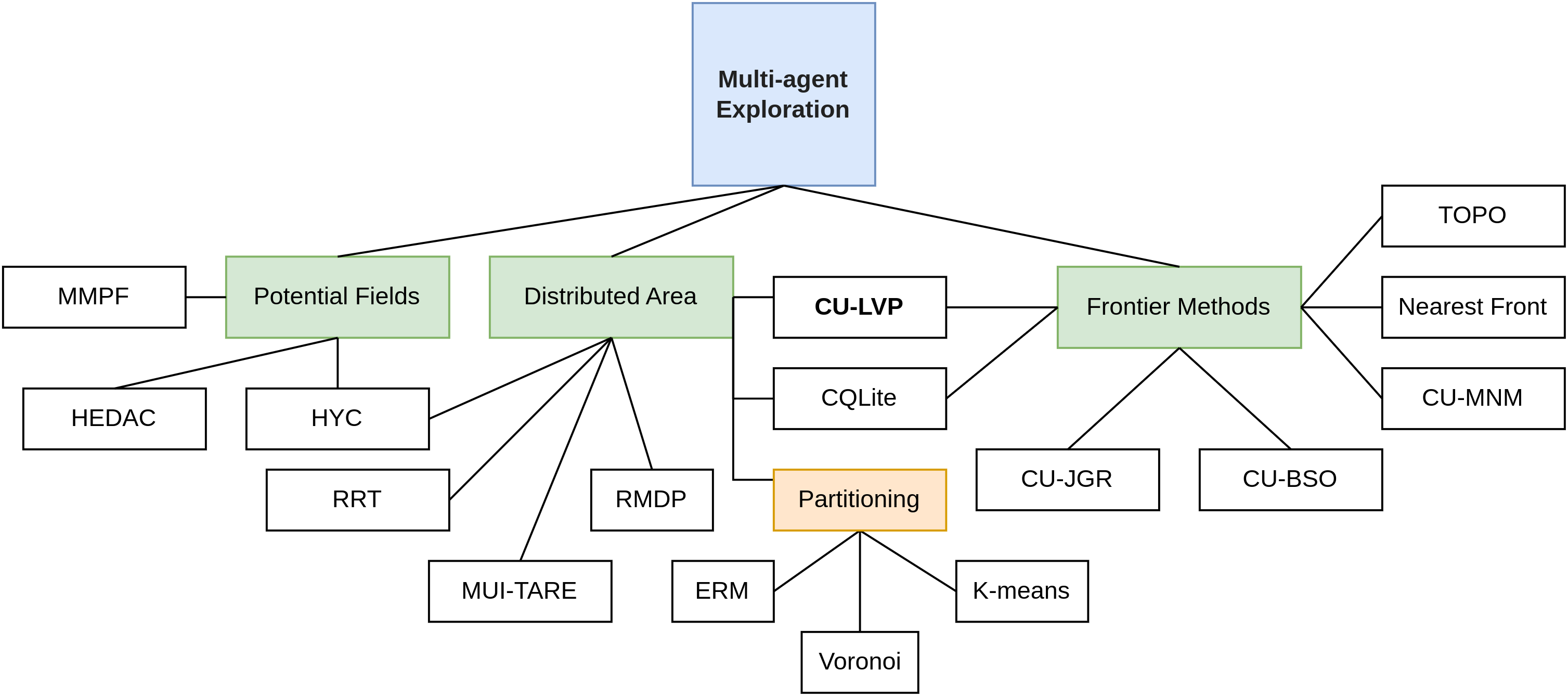
Robotic exploration has long captivated researchers aiming to map complex environments efficiently. Techniques such as potential fields and frontier exploration have traditionally been employed in this pursuit, primarily focusing on solitary agents. Recent advancements have shifted towards optimizing exploration efficiency through multiagent systems. However, many existing approaches overlook critical real-world factors, such as broadcast range limitations, communication costs, and coverage overlap. This paper addresses these gaps by proposing a distributed maze exploration strategy (CU-LVP) that assumes constrained broadcast ranges and utilizes Voronoi diagrams for better area partitioning. By adapting traditional multiagent methods to distributed environments with limited broadcast ranges, this study evaluates their performance across diverse maze topologies, demonstrating the efficacy and practical applicability of the proposed method. The code and experimental results supporting this study are available in the following repository: https://github.com/manouslinard/multiagent-exploration/.
5/31/2024

Distributed Autonomous Swarm Formation for Dynamic Network Bridging
Raffaele Galliera, Thies Mohlenhof, Alessandro Amato, Daniel Duran, Kristen Brent Venable, Niranjan Suri
0
0
Effective operation and seamless cooperation of robotic systems are a fundamental component of next-generation technologies and applications. In contexts such as disaster response, swarm operations require coordinated behavior and mobility control to be handled in a distributed manner, with the quality of the agents' actions heavily relying on the communication between them and the underlying network. In this paper, we formulate the problem of dynamic network bridging in a novel Decentralized Partially Observable Markov Decision Process (Dec-POMDP), where a swarm of agents cooperates to form a link between two distant moving targets. Furthermore, we propose a Multi-Agent Reinforcement Learning (MARL) approach for the problem based on Graph Convolutional Reinforcement Learning (DGN) which naturally applies to the networked, distributed nature of the task. The proposed method is evaluated in a simulated environment and compared to a centralized heuristic baseline showing promising results. Moreover, a further step in the direction of sim-to-real transfer is presented, by additionally evaluating the proposed approach in a near Live Virtual Constructive (LVC) UAV framework.
4/3/2024