Distributed maze exploration using multiple agents and optimal goal assignment

0
Sign in to get full access
Overview
- This research paper explores the use of multiple agents to efficiently explore a maze and assign optimal goals in a distributed manner.
- The research was funded by the European Union's Horizon Europe research and innovation program under the Ceasefire grant agreement.
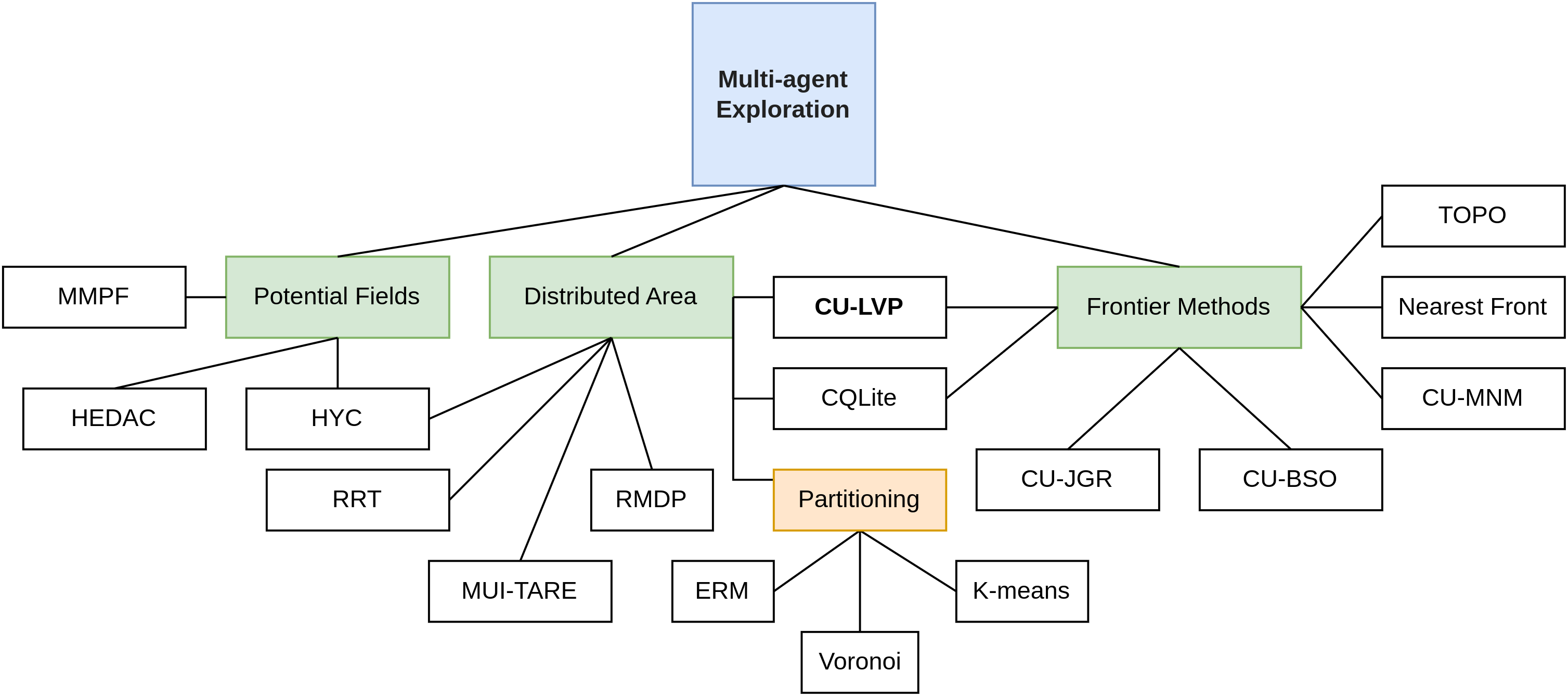
- The paper investigates techniques such as potential fields, Voronoi partitioning, and cost-utility to enable effective exploration and task allocation among the agents.
- The proposed approach aims to address the challenges of communication-constrained multi-robot exploration and real-time distributed target searching.
Plain English Explanation
The research explores a scenario where multiple robots or agents work together to explore a maze-like environment and find important locations or "goals" within it. The key idea is to have the agents coordinate their movements and decision-making in a decentralized way, without relying on a central command or control system.
The agents use techniques like "potential fields" to navigate the maze, creating virtual forces that attract them to unexplored areas and repel them from obstacles. They also divide the maze into smaller regions using a mathematical method called "Voronoi partitioning," allowing each agent to focus on a specific area.
To decide which goals the agents should pursue, the researchers introduce a "cost-utility" approach. This means the agents evaluate the effort (cost) required to reach a goal versus the potential benefit (utility) of reaching that goal, and then choose the best options. This helps the agents work efficiently and avoid wasting time and resources.
The key advantage of this distributed approach is that it can be more robust and flexible than a centralized system. If one agent fails or encounters issues, the others can continue the exploration without a significant impact. Additionally, the decentralized nature allows the agents to respond quickly to changes in the environment, making the overall system more adaptable.
Technical Explanation
The research paper proposes a distributed approach for multi-agent maze exploration and optimal goal assignment. The main techniques used include:
-
Potential Fields: The agents use artificial potential fields to navigate the maze. These fields create virtual forces that attract the agents towards unexplored areas and repel them from obstacles, allowing them to efficiently explore the environment.
-
Voronoi Partitioning: The maze is divided into smaller regions using Voronoi partitioning, a mathematical technique that assigns each agent a specific area to focus on. This helps the agents coordinate their exploration efforts and avoid duplicating work.
-
Cost-Utility Approach: To determine which goals the agents should pursue, the researchers introduce a cost-utility framework. This evaluates the effort (cost) required to reach a goal versus the potential benefit (utility) of reaching that goal, allowing the agents to make informed decisions about the best course of action.
The agents communicate with each other to share information about their exploration progress and coordinate their actions. This distributed approach helps the system remain robust and adaptable, as the failure or issues encountered by one agent do not significantly impact the overall exploration.
The paper presents simulation-based experiments that demonstrate the effectiveness of the proposed approach in terms of exploration coverage, goal discovery, and task allocation efficiency.
Critical Analysis
The research presented in this paper addresses important challenges in the field of multi-agent systems, such as communication-constrained exploration and real-time distributed target searching. The use of techniques like potential fields, Voronoi partitioning, and cost-utility analysis provides a comprehensive framework for coordinating the agents' actions and decision-making.
One potential limitation of the study is that it is based on simulations, and the performance of the proposed approach may vary in real-world scenarios with more complex environmental conditions or unpredictable obstacles. Additionally, the paper does not discuss the scalability of the approach as the number of agents or the size of the maze increases, which could be an important factor in practical applications.
Further research could explore the integration of this distributed approach with other techniques, such as machine learning or reinforcement learning, to enhance the agents' decision-making and adaptation capabilities. Validating the approach through real-world experiments would also help assess its practical feasibility and identify any additional challenges that may arise.
Conclusion
This research paper presents a promising distributed approach for multi-agent maze exploration and optimal goal assignment. By leveraging techniques like potential fields, Voronoi partitioning, and cost-utility analysis, the proposed system enables the agents to coordinate their actions effectively and make informed decisions about their exploration and task allocation.
The key advantages of this distributed approach are its robustness, flexibility, and adaptability, as the failure or issues encountered by individual agents do not significantly impact the overall exploration process. This makes the system well-suited for real-world applications where communication constraints and dynamic environments are common challenges.
While the simulation-based results are encouraging, further research and real-world validation would help to fully assess the practical viability and scalability of the proposed approach. Integrating it with advanced learning techniques could also enhance the agents' decision-making capabilities and adaptability, paving the way for more sophisticated multi-agent exploration and task execution systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Distributed maze exploration using multiple agents and optimal goal assignment
Manousos Linardakis, Iraklis Varlamis, Georgios Th. Papadopoulos
Robotic exploration has long captivated researchers aiming to map complex environments efficiently. Techniques such as potential fields and frontier exploration have traditionally been employed in this pursuit, primarily focusing on solitary agents. Recent advancements have shifted towards optimizing exploration efficiency through multiagent systems. However, many existing approaches overlook critical real-world factors, such as broadcast range limitations, communication costs, and coverage overlap. This paper addresses these gaps by proposing a distributed maze exploration strategy (CU-LVP) that assumes constrained broadcast ranges and utilizes Voronoi diagrams for better area partitioning. By adapting traditional multiagent methods to distributed environments with limited broadcast ranges, this study evaluates their performance across diverse maze topologies, demonstrating the efficacy and practical applicability of the proposed method. The code and experimental results supporting this study are available in the following repository: https://github.com/manouslinard/multiagent-exploration/.
Read more5/31/2024

0
Multi-robot maze exploration using an efficient cost-utility method
Manousos Linardakis, Iraklis Varlamis, Georgios Th. Papadopoulos
In the field of modern robotics, robots are proving to be useful in tackling high-risk situations, such as navigating hazardous environments like burning buildings, earthquake-stricken areas, or patrolling crime-ridden streets, as well as exploring uncharted caves. These scenarios share similarities with maze exploration problems in terms of complexity. While several methods have been proposed for single-agent systems, ranging from potential fields to flood-fill methods, recent research endeavors have focused on creating methods tailored for multiple agents to enhance the quality and efficiency of maze coverage. The contribution of this paper is the implementation of established maze exploration methods and their comparison with a new cost-utility algorithm designed for multiple agents, which combines the existing methodologies to optimize exploration outcomes. Through a comprehensive and comparative analysis, this paper evaluates the performance of the new approach against the implemented baseline methods from the literature, highlighting its efficacy and potential advantages in various scenarios. The code and experimental results supporting this study are available in the following repository (https://github.com/manouslinard/multiagent-exploration/).
Read more7/22/2024

0
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph
Qianli Dong, Haobo Xi, Shiyong Zhang, Qingchen Bi, Tianyi Li, Ziyu Wang, Xuebo Zhang
Efficient data transmission and reasonable task allocation are important to improve multi-robot exploration efficiency. However, most communication data types typically contain redundant information and thus require massive communication volume. Moreover, exploration-oriented task allocation is far from trivial and becomes even more challenging for resource-limited unmanned aerial vehicles (UAVs). In this paper, we propose a fast and communication-efficient multi-UAV exploration method for exploring large environments. We first design a multi-robot dynamic topological graph (MR-DTG) consisting of nodes representing the explored and exploring regions and edges connecting nodes. Supported by MR-DTG, our method achieves efficient communication by only transferring the necessary information required by exploration planning. To further improve the exploration efficiency, a hierarchical multi-UAV exploration method is devised using MR-DTG. Specifically, the emph{graph Voronoi partition} is used to allocate MR-DTG's nodes to the closest UAVs, considering the actual motion cost, thus achieving reasonable task allocation. To our knowledge, this is the first work to address multi-UAV exploration using emph{graph Voronoi partition}. The proposed method is compared with a state-of-the-art method in simulations. The results show that the proposed method is able to reduce the exploration time and communication volume by up to 38.3% and 95.5%, respectively. Finally, the effectiveness of our method is validated in the real-world experiment with 6 UAVs. We will release the source code to benefit the community.
Read more8/13/2024
🧠
0
Frontier-Based Exploration for Multi-Robot Rendezvous in Communication-Restricted Unknown Environments
Mauro Tellaroli, Matteo Luperto, Michele Antonazzi, Nicola Basilico
Multi-robot rendezvous and exploration are fundamental challenges in the domain of mobile robotic systems. This paper addresses multi-robot rendezvous within an initially unknown environment where communication is only possible after the rendezvous. Traditionally, exploration has been focused on rapidly mapping the environment, often leading to suboptimal rendezvous performance in later stages. We adapt a standard frontier-based exploration technique to integrate exploration and rendezvous into a unified strategy, with a mechanism that allows robots to re-visit previously explored regions thus enhancing rendezvous opportunities. We validate our approach in 3D realistic simulations using ROS, showcasing its effectiveness in achieving faster rendezvous times compared to exploration strategies.
Read more7/22/2024