Real-Time Interactions Between Human Controllers and Remote Devices in Metaverse

0
Sign in to get full access
Overview
- Examines real-time interactions between human controllers and remote devices in the metaverse
- Focuses on synchronization and communication challenges in this human-in-the-loop system
- Proposes solutions to enable seamless, responsive control of remote devices from within the virtual environment
Plain English Explanation
This paper explores the challenges of controlling physical devices from within a virtual, metaverse-like environment in real-time. When a human user interacts with a remote device from inside a virtual world, there are significant synchronization and communication hurdles to overcome.
The researchers investigate techniques to enable seamless real-time interactions between the human controller and the physical device. This allows the user to directly manipulate and control the remote device as if it were an extension of themselves, rather than experiencing latency or lag.
The proposed solutions focus on synchronizing the virtual and physical environments and facilitating low-latency communication between the two. This enables a seamless, immersive experience where the user can intuitively control the remote device as if it were an part of their own body.
Technical Explanation
The paper presents a system architecture and techniques to enable real-time interactions between human controllers and remote devices within a metaverse-like virtual environment.
The key components include:
-
Synchronization: Aligning the state of the virtual environment with the physical device in real-time, using techniques like zero-shot human interaction generation and unsupervised neural motion retargeting.
-
Low-Latency Communication: Facilitating responsive, high-bandwidth communication between the virtual interface and physical device to enable low-latency control.
-
Intuitive Control Schemes: Leveraging techniques like imitation-based control to allow users to control remote devices intuitively, as if they were an extension of their own body.
The researchers evaluate their system through experiments and user studies, demonstrating the effectiveness of their approach in enabling seamless, real-time interactions between human users and remote devices in the metaverse.
Critical Analysis
The paper provides a comprehensive solution to the challenge of controlling physical devices from within a virtual environment. However, it acknowledges several potential limitations and areas for further research:
-
Scalability: The proposed techniques may face challenges in scaling to support a large number of concurrent users and devices within the metaverse.
-
Robustness: The system's resilience to network issues, device failures, or other disruptions in the real-world physical environment is not extensively explored.
-
Privacy and Security: The paper does not address the potential privacy and security implications of enabling such intimate virtual-physical interactions, which could raise concerns about data privacy and device/network vulnerabilities.
-
Ethical Considerations: The paper does not delve into the broader ethical implications of blurring the boundaries between the virtual and physical worlds, such as the potential for misuse or unintended consequences.
Addressing these limitations and exploring the ethical dimensions of this technology would be valuable areas for future research.
Conclusion
This paper presents a novel system architecture and techniques to enable seamless, real-time interactions between human controllers and remote devices within a metaverse-like virtual environment. By synchronizing the virtual and physical worlds and facilitating low-latency communication, the researchers have developed a solution that allows users to intuitively control remote devices as if they were an extension of their own body.
The proposed approach has the potential to revolutionize how we interact with and manipulate physical objects from within virtual spaces, unlocking new possibilities for remote collaboration, teleoperation, and immersive experiences. However, further research is needed to address issues of scalability, robustness, privacy, security, and the broader ethical implications of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-Time Interactions Between Human Controllers and Remote Devices in Metaverse
Kan Chen, Zhen Meng, Xiangmin Xu, Changyang She, Philip G. Zhao
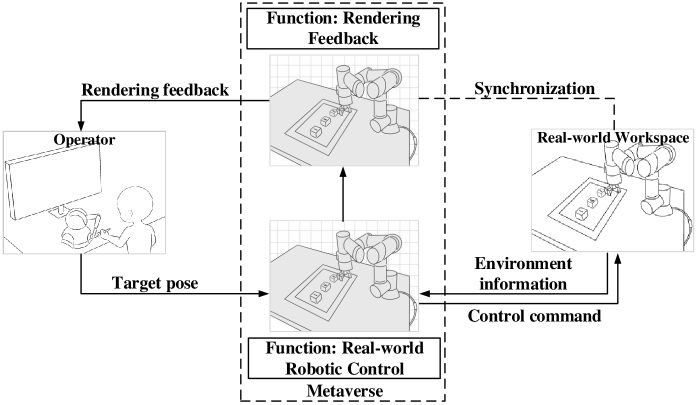
Supporting real-time interactions between human controllers and remote devices remains a challenging goal in the Metaverse due to the stringent requirements on computing workload, communication throughput, and round-trip latency. In this paper, we establish a novel framework for real-time interactions through the virtual models in the Metaverse. Specifically, we jointly predict the motion of the human controller for 1) proactive rendering in the Metaverse and 2) generating control commands to the real-world remote device in advance. The virtual model is decoupled into two components for rendering and control, respectively. To dynamically adjust the prediction horizons for rendering and control, we develop a two-step human-in-the-loop continuous reinforcement learning approach and use an expert policy to improve the training efficiency. An experimental prototype is built to verify our algorithm with different communication latencies. Compared with the baseline policy without prediction, our proposed method can reduce 1) the Motion-To-Photon (MTP) latency between human motion and rendering feedback and 2) the root mean squared error (RMSE) between human motion and real-world remote devices significantly.
Read more7/24/2024
0
Wireless Multi-User Interactive Virtual Reality in Metaverse with Edge-Device Collaborative Computing
Caolu Xu, Zhiyong Chen, Meixia Tao, Wenjun Zhang
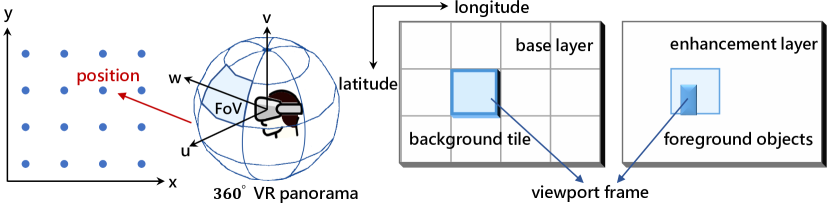
The immersive nature of the metaverse presents significant challenges for wireless multi-user interactive virtual reality (VR), such as ultra-low latency, high throughput and intensive computing, which place substantial demands on the wireless bandwidth and rendering resources of mobile edge computing (MEC). In this paper, we propose a wireless multi-user interactive VR with edge-device collaborative computing framework to overcome the motion-to-photon (MTP) threshold bottleneck. Specifically, we model the serial-parallel task execution in queues within a foreground and background separation architecture. The rendering indices of background tiles within the prediction window are determined, and both the foreground and selected background tiles are loaded into respective processing queues based on the rendering locations. To minimize the age of sensor information and the power consumption of mobile devices, we optimize rendering decisions and MEC resource allocation subject to the MTP constraint. To address this optimization problem, we design a safe reinforcement learning (RL) algorithm, active queue management-constrained updated projection (AQM-CUP). AQM-CUP constructs an environment suitable for queues, incorporating expired tiles actively discarded in processing buffers into its state and reward system. Experimental results demonstrate that the proposed framework significantly enhances user immersion while reducing device power consumption, and the superiority of the proposed AQM-CUP algorithm over conventional methods in terms of the training convergence and performance metrics.
Read more7/31/2024
🛸
0
InterControl: Zero-shot Human Interaction Generation by Controlling Every Joint
Zhenzhi Wang, Jingbo Wang, Yixuan Li, Dahua Lin, Bo Dai
Text-conditioned motion synthesis has made remarkable progress with the emergence of diffusion models. However, the majority of these motion diffusion models are primarily designed for a single character and overlook multi-human interactions. In our approach, we strive to explore this problem by synthesizing human motion with interactions for a group of characters of any size in a zero-shot manner. The key aspect of our approach is the adaptation of human-wise interactions as pairs of human joints that can be either in contact or separated by a desired distance. In contrast to existing methods that necessitate training motion generation models on multi-human motion datasets with a fixed number of characters, our approach inherently possesses the flexibility to model human interactions involving an arbitrary number of individuals, thereby transcending the limitations imposed by the training data. We introduce a novel controllable motion generation method, InterControl, to encourage the synthesized motions maintaining the desired distance between joint pairs. It consists of a motion controller and an inverse kinematics guidance module that realistically and accurately aligns the joints of synthesized characters to the desired location. Furthermore, we demonstrate that the distance between joint pairs for human-wise interactions can be generated using an off-the-shelf Large Language Model (LLM). Experimental results highlight the capability of our framework to generate interactions with multiple human characters and its potential to work with off-the-shelf physics-based character simulators.
Read more6/18/2024

0
Real-Time Dynamic Robot-Assisted Hand-Object Interaction via Motion Primitives
Mingqi Yuan, Huijiang Wang, Kai-Fung Chu, Fumiya Iida, Bo Li, Wenjun Zeng
Advances in artificial intelligence (AI) have been propelling the evolution of human-robot interaction (HRI) technologies. However, significant challenges remain in achieving seamless interactions, particularly in tasks requiring physical contact with humans. These challenges arise from the need for accurate real-time perception of human actions, adaptive control algorithms for robots, and the effective coordination between human and robotic movements. In this paper, we propose an approach to enhancing physical HRI with a focus on dynamic robot-assisted hand-object interaction (HOI). Our methodology integrates hand pose estimation, adaptive robot control, and motion primitives to facilitate human-robot collaboration. Specifically, we employ a transformer-based algorithm to perform real-time 3D modeling of human hands from single RGB images, based on which a motion primitives model (MPM) is designed to translate human hand motions into robotic actions. The robot's action implementation is dynamically fine-tuned using the continuously updated 3D hand models. Experimental validations, including a ring-wearing task, demonstrate the system's effectiveness in adapting to real-time movements and assisting in precise task executions.
Read more5/31/2024