Real-time Planning of Minimum-time Trajectories for Agile UAV Flight

0
Sign in to get full access
Overview
- This research paper presents a real-time planning algorithm for generating minimum-time trajectories for agile Unmanned Aerial Vehicles (UAVs).
- The algorithm considers the vehicle's dynamic constraints and can handle complex environments with obstacles.
- The authors demonstrate the effectiveness of their approach through simulation and real-world experiments.
Plain English Explanation
The paper focuses on developing a system that can plan the fastest possible flight path for a highly maneuverable drone, even in complicated environments with obstacles. The key idea is to create an algorithm that can quickly calculate the optimal trajectory the drone should follow to reach its destination as fast as possible, while still obeying the drone's physical limitations and avoiding any obstacles in the way.
This is important because drones are becoming increasingly capable of performing agile, high-speed maneuvers. Having the ability to plan the fastest route in real-time allows drones to be used more effectively in time-sensitive applications, such as search and rescue operations or package delivery. The algorithm described in the paper aims to make drone flight as efficient and responsive as possible.
Technical Explanation
The paper presents a real-time trajectory planning algorithm for agile UAVs that generates minimum-time trajectories while considering the vehicle's dynamic constraints and obstacles in the environment. The approach uses a sampling-based motion planning framework, where a tree of candidate trajectories is grown from the current state of the vehicle.
The authors introduce several key innovations to improve the efficiency and effectiveness of the trajectory planning:
- A novel cost function that combines the time-optimality of the trajectory with the distance to obstacles, encouraging safe yet fast maneuvers.
- A heuristic-guided tree expansion strategy that intelligently explores the search space to find the optimal trajectory more quickly.
- A method for efficiently checking the feasibility of candidate trajectories by leveraging the vehicle's dynamic model.
Through simulation and real-world experiments on a quadrotor platform, the authors demonstrate that their approach can plan minimum-time trajectories in complex environments in real-time, outperforming baseline planning methods.
Critical Analysis
The paper presents a well-designed and thorough approach to the problem of time-optimal trajectory planning for agile UAVs. The authors have identified an important and practical challenge, and their proposed solution shows strong empirical performance.
One potential limitation of the work is that the experiments are conducted in simulated or relatively simple real-world environments. While the authors mention that their approach can handle complex obstacles, further testing in more challenging, cluttered environments would help validate the method's full capabilities.
Additionally, the paper does not deeply explore the trade-offs between planning time, trajectory optimality, and safety. It would be interesting to see how the algorithm's performance scales as the complexity of the environment or the aggressiveness of the maneuvers increases.
Overall, this research represents a valuable contribution to the field of autonomous drone navigation, and the proposed techniques could have significant practical applications in time-sensitive UAV missions.
Conclusion
This paper presents a real-time trajectory planning algorithm that can generate minimum-time paths for agile UAVs while considering the vehicle's dynamics and obstacles in the environment. The authors introduce several key innovations to improve the efficiency and effectiveness of the planning process, and they demonstrate the approach's capabilities through simulation and real-world experiments.
The research represents an important step forward in enabling drones to perform highly maneuverable, time-critical missions, with potential applications in areas like search and rescue, package delivery, and aerial inspection. The critical analysis suggests that further testing and analysis could help refine the approach and better understand its limitations, but the core contributions of the work are valuable and impactful.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-time Planning of Minimum-time Trajectories for Agile UAV Flight
Krystof Teissing, Matej Novosad, Robert Penicka, Martin Saska
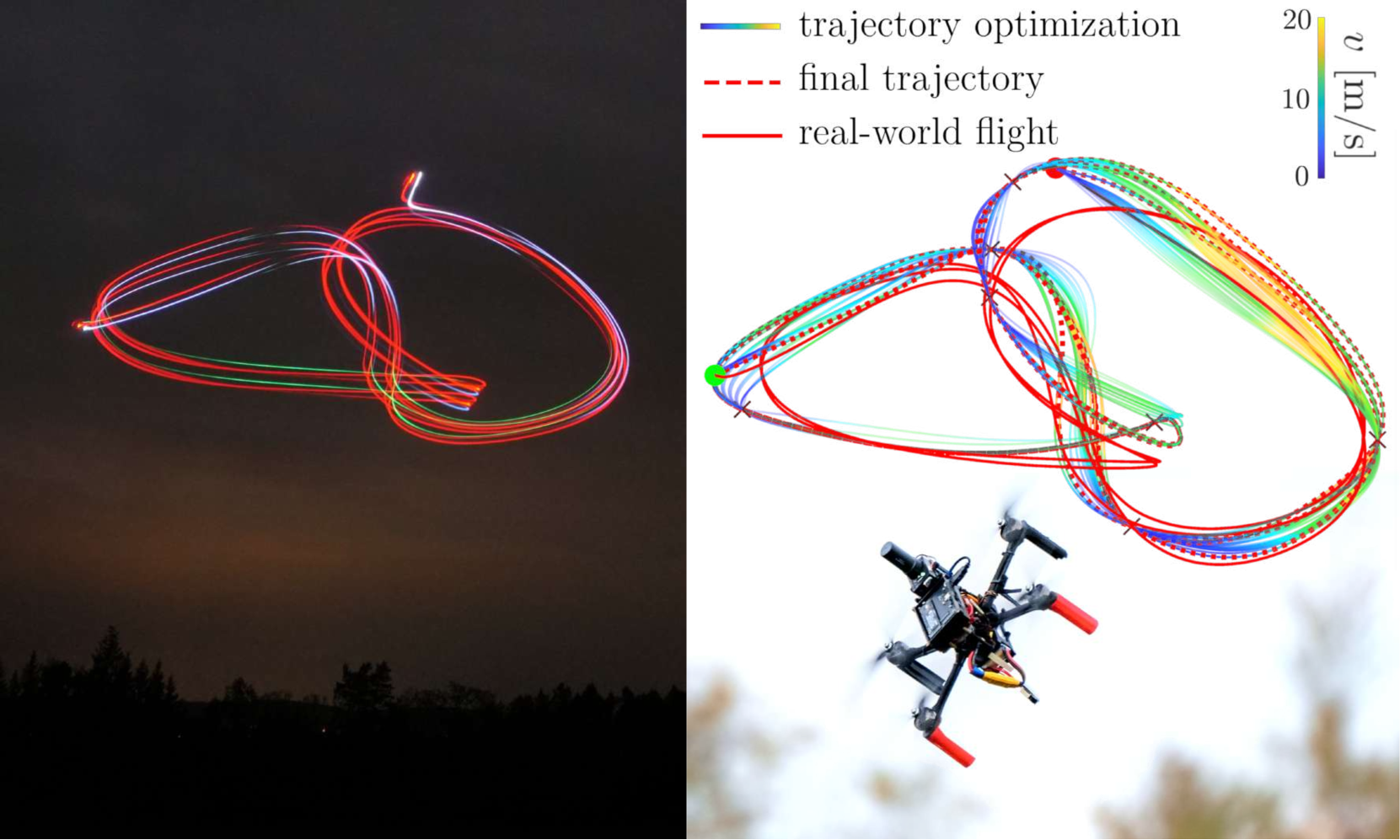
We address the challenge of real-time planning of minimum-time trajectories over multiple waypoints, onboard multirotor UAVs. Previous works demonstrated that achieving a truly time-optimal trajectory is computationally too demanding to enable frequent replanning during agile flight, especially on less powerful flight computers. Our approach overcomes this stumbling block by utilizing a point-mass model with a novel iterative thrust decomposition algorithm, enabling the UAV to use all of its collective thrust, something previous point-mass approaches could not achieve. The approach enables gravity and drag modeling integration, significantly reducing tracking errors in high-speed trajectories, which is proven through an ablation study. When combined with a new multi-waypoint optimization algorithm, which uses a gradient-based method to converge to optimal velocities in waypoints, the proposed method generates minimum-time multi-waypoint trajectories within milliseconds. The proposed approach, which we provide as open-source package, is validated both in simulation and in real-world, using Nonlinear Model Predictive Control. With accelerations of up to 3.5g and speeds over 100 km/h, trajectories generated by the proposed method yield similar or even smaller tracking errors than the trajectories generated for a full multirotor model.
Read more9/25/2024
🛠️
0
Towards reliable real-time trajectory optimization
Fatemeh Rastgar
Motion planning is a key aspect of robotics. A common approach to address motion planning problems is trajectory optimization. Trajectory optimization can represent the high-level behaviors of robots through mathematical formulations. However, current trajectory optimization approaches have two main challenges. Firstly, their solution heavily depends on the initial guess, and they are prone to get stuck in local minima. Secondly, they face scalability limitations by increasing the number of constraints. This thesis endeavors to tackle these challenges by introducing four innovative trajectory optimization algorithms to improve reliability, scalability, and computational efficiency. There are two novel aspects of the proposed algorithms. The first key innovation is remodeling the kinematic constraints and collision avoidance constraints. Another key innovation lies in the design of algorithms that effectively utilize parallel computation on GPU accelerators. By using reformulated constraints and leveraging the computational power of GPUs, the proposed algorithms of this thesis demonstrate significant improvements in efficiency and scalability compared to the existing methods. Parallelization enables faster computation times, allowing for real-time decision-making in dynamic environments. Moreover, the algorithms are designed to adapt to changes in the environment, ensuring robust performance. Extensive benchmarking for each proposed optimizer validates their efficacy. Overall, this thesis makes a significant contribution to the field of trajectory optimization algorithms. It introduces innovative solutions that specifically address the challenges faced by existing methods. The proposed algorithms pave the way for more efficient and robust motion planning solutions in robotics by leveraging parallel computation and specific mathematical structures.
Read more8/21/2024
🛸
0
Multi-UAVs end-to-end Distributed Trajectory Generation over Point Cloud Data
Antonio Marino (RAINBOW), Claudio Pacchierotti (RAINBOW), Paolo Robuffo Giordano (RAINBOW)
This paper introduces an end-to-end trajectory planning algorithm tailored for multi-UAV systems that generates collision-free trajectories in environments populated with both static and dynamic obstacles, leveraging point cloud data. Our approach consists of a 2-fork neural network fed with sensing and localization data, able to communicate intermediate learned features among the agents. One network branch crafts an initial collision-free trajectory estimate, while the other devises a neural collision constraint for subsequent optimization, ensuring trajectory continuity and adherence to physicalactuation limits. Extensive simulations in challenging cluttered environments, involving up to 25 robots and 25% obstacle density, show a collision avoidance success rate in the range of 100 -- 85%. Finally, we introduce a saliency map computation method acting on the point cloud data, offering qualitative insights into our methodology.
Read more7/1/2024

0
Time-Optimal Planning for Long-Range Quadrotor Flights: An Automatic Optimal Synthesis Approach
Chao Qin, Jingxiang Chen, Yifan Lin, Abhishek Goudar, Angela P. Schoellig, Hugh H. -T. Liu
Time-critical tasks such as drone racing typically cover large operation areas. However, it is difficult and computationally intensive for current time-optimal motion planners to accommodate long flight distances since a large yet unknown number of knot points is required to represent the trajectory. We present a polynomial-based automatic optimal synthesis (AOS) approach that can address this challenge. Our method not only achieves superior time optimality but also maintains a consistently low computational cost across different ranges while considering the full quadrotor dynamics. First, we analyze the properties of time-optimal quadrotor maneuvers to determine the minimal number of polynomial pieces required to capture the dominant structure of time-optimal trajectories. This enables us to represent substantially long minimum-time trajectories with a minimal set of variables. Then, a robust optimization scheme is developed to handle arbitrary start and end conditions as well as intermediate waypoints. Extensive comparisons show that our approach is faster than the state-of-the-art approach by orders of magnitude with comparable time optimality. Real-world experiments further validate the quality of the resulting trajectories, demonstrating aggressive time-optimal maneuvers with a peak velocity of 8.86 m/s.
Read more7/26/2024