Realistic Surgical Image Dataset Generation Based On 3D Gaussian Splatting

0

Sign in to get full access
Overview
- This paper presents a method for generating realistic surgical image datasets using 3D Gaussian splatting.
- The approach aims to create high-quality synthetic images that can be used for training machine learning models in the medical imaging field.
- The method involves reconstructing 3D surgical scenes and rendering them using a 3D Gaussian splatting technique to produce realistic-looking images.
Plain English Explanation
The researchers developed a way to create lifelike surgical images that can be used to train 3D Reconstruction and medical imaging models. They start by building 3D models of surgical scenes, then use a special rendering technique called 3D Gaussian Splatting to generate realistic-looking images from these 3D models.
This approach allows them to create large, high-quality datasets of surgical images without having to capture real-world footage, which can be difficult and expensive. The synthetic images maintain the visual realism needed to effectively train 6D Pose Estimation and Novel View Synthesis models for medical applications.
Technical Explanation
The paper describes a pipeline for generating realistic surgical image datasets using 3D Gaussian splatting. The process begins by reconstructing 3D surgical scenes from multi-view images. This is achieved through a structure-from-motion (SfM) approach that estimates the camera poses and 3D point cloud of the scene.
The 3D point cloud is then converted into a 3D mesh representation using Poisson surface reconstruction. To render realistic images from this 3D model, the authors employ a 3D Gaussian splatting technique. This involves projecting 3D points onto the image plane and rendering them as Gaussian kernels, which produces a smooth, natural appearance.
By adjusting parameters like the Gaussian kernel size and point cloud density, the authors are able to generate a diverse set of synthetic surgical images that closely mimic the appearance of real-world data. They demonstrate the effectiveness of this approach through qualitative and quantitative evaluations, showing that the generated images can be used to train machine learning models for various medical imaging tasks.
Critical Analysis
The paper presents a compelling approach for generating realistic surgical image datasets, which could be highly valuable for training computer vision models in the medical domain. The 3D Gaussian splatting technique appears to be a robust and flexible rendering method that can produce visually convincing results.
However, the paper does not address potential limitations or challenges with the proposed approach. For example, it is unclear how the method would handle the complexities of real-world surgical environments, such as varying lighting conditions, occlusions, and dynamic scenes. Additionally, the paper does not discuss the computational efficiency of the rendering process, which could be an important consideration for practical applications.
Furthermore, while the authors demonstrate the use of the generated datasets for training machine learning models, they do not provide a thorough evaluation of the performance of these models on real-world surgical data. It would be valuable to see how well the models trained on synthetic data generalize to actual clinical scenarios.
Conclusion
This paper introduces a novel method for generating realistic surgical image datasets using 3D Gaussian splatting. The approach offers a promising solution for creating large-scale, high-quality training data for medical imaging and computer vision applications without the need for extensive real-world data collection.
The ability to synthetically generate realistic surgical images could have significant implications for the development of more robust and accurate 3D Reconstruction, 6D Pose Estimation, and Novel View Synthesis models for medical imaging and surgical assistance systems. Further research is needed to address the potential limitations and explore the practical applications of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Realistic Surgical Image Dataset Generation Based On 3D Gaussian Splatting
Tianle Zeng, Gerardo Loza Galindo, Junlei Hu, Pietro Valdastri, Dominic Jones
Computer vision technologies markedly enhance the automation capabilities of robotic-assisted minimally invasive surgery (RAMIS) through advanced tool tracking, detection, and localization. However, the limited availability of comprehensive surgical datasets for training represents a significant challenge in this field. This research introduces a novel method that employs 3D Gaussian Splatting to generate synthetic surgical datasets. We propose a method for extracting and combining 3D Gaussian representations of surgical instruments and background operating environments, transforming and combining them to generate high-fidelity synthetic surgical scenarios. We developed a data recording system capable of acquiring images alongside tool and camera poses in a surgical scene. Using this pose data, we synthetically replicate the scene, thereby enabling direct comparisons of the synthetic image quality (29.592 PSNR). As a further validation, we compared two YOLOv5 models trained on the synthetic and real data, respectively, and assessed their performance in an unseen real-world test dataset. Comparing the performances, we observe an improvement in neural network performance, with the synthetic-trained model outperforming the real-world trained model by 12%, testing both on real-world data.
Read more7/23/2024

0
SurgicalGaussian: Deformable 3D Gaussians for High-Fidelity Surgical Scene Reconstruction
Weixing Xie, Junfeng Yao, Xianpeng Cao, Qiqin Lin, Zerui Tang, Xiao Dong, Xiaohu Guo
Dynamic reconstruction of deformable tissues in endoscopic video is a key technology for robot-assisted surgery. Recent reconstruction methods based on neural radiance fields (NeRFs) have achieved remarkable results in the reconstruction of surgical scenes. However, based on implicit representation, NeRFs struggle to capture the intricate details of objects in the scene and cannot achieve real-time rendering. In addition, restricted single view perception and occluded instruments also propose special challenges in surgical scene reconstruction. To address these issues, we develop SurgicalGaussian, a deformable 3D Gaussian Splatting method to model dynamic surgical scenes. Our approach models the spatio-temporal features of soft tissues at each time stamp via a forward-mapping deformation MLP and regularization to constrain local 3D Gaussians to comply with consistent movement. With the depth initialization strategy and tool mask-guided training, our method can remove surgical instruments and reconstruct high-fidelity surgical scenes. Through experiments on various surgical videos, our network outperforms existing method on many aspects, including rendering quality, rendering speed and GPU usage. The project page can be found at https://surgicalgaussian.github.io.
Read more7/9/2024

0
Free-SurGS: SfM-Free 3D Gaussian Splatting for Surgical Scene Reconstruction
Jiaxin Guo, Jiangliu Wang, Di Kang, Wenzhen Dong, Wenting Wang, Yun-hui Liu
Real-time 3D reconstruction of surgical scenes plays a vital role in computer-assisted surgery, holding a promise to enhance surgeons' visibility. Recent advancements in 3D Gaussian Splatting (3DGS) have shown great potential for real-time novel view synthesis of general scenes, which relies on accurate poses and point clouds generated by Structure-from-Motion (SfM) for initialization. However, 3DGS with SfM fails to recover accurate camera poses and geometry in surgical scenes due to the challenges of minimal textures and photometric inconsistencies. To tackle this problem, in this paper, we propose the first SfM-free 3DGS-based method for surgical scene reconstruction by jointly optimizing the camera poses and scene representation. Based on the video continuity, the key of our method is to exploit the immediate optical flow priors to guide the projection flow derived from 3D Gaussians. Unlike most previous methods relying on photometric loss only, we formulate the pose estimation problem as minimizing the flow loss between the projection flow and optical flow. A consistency check is further introduced to filter the flow outliers by detecting the rigid and reliable points that satisfy the epipolar geometry. During 3D Gaussian optimization, we randomly sample frames to optimize the scene representations to grow the 3D Gaussian progressively. Experiments on the SCARED dataset demonstrate our superior performance over existing methods in novel view synthesis and pose estimation with high efficiency. Code is available at https://github.com/wrld/Free-SurGS.
Read more7/4/2024
0
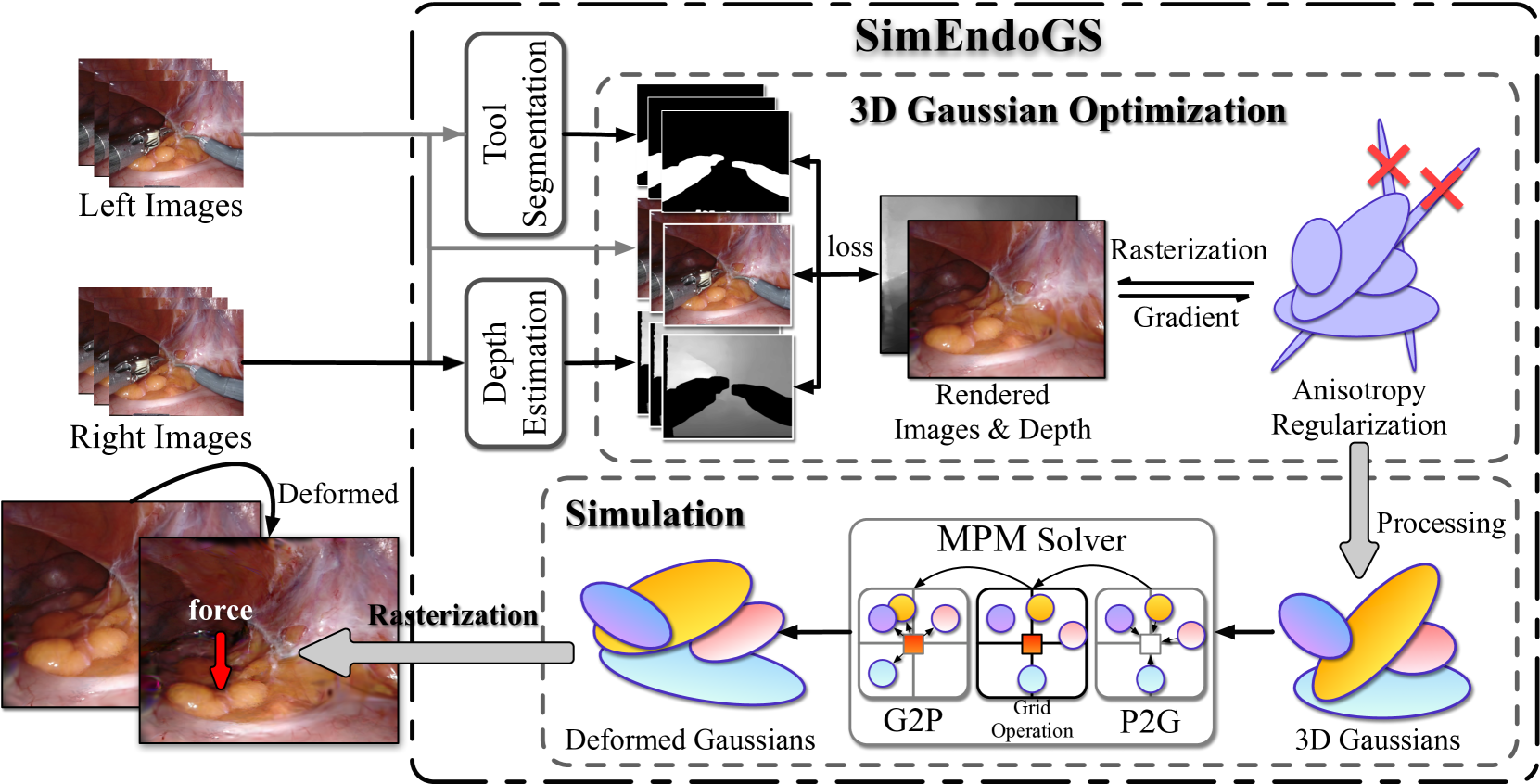
Efficient Data-driven Scene Simulation using Robotic Surgery Videos via Physics-embedded 3D Gaussians
Zhenya Yang, Kai Chen, Yonghao Long, Qi Dou
Surgical scene simulation plays a crucial role in surgical education and simulator-based robot learning. Traditional approaches for creating these environments with surgical scene involve a labor-intensive process where designers hand-craft tissues models with textures and geometries for soft body simulations. This manual approach is not only time-consuming but also limited in the scalability and realism. In contrast, data-driven simulation offers a compelling alternative. It has the potential to automatically reconstruct 3D surgical scenes from real-world surgical video data, followed by the application of soft body physics. This area, however, is relatively uncharted. In our research, we introduce 3D Gaussian as a learnable representation for surgical scene, which is learned from stereo endoscopic video. To prevent over-fitting and ensure the geometrical correctness of these scenes, we incorporate depth supervision and anisotropy regularization into the Gaussian learning process. Furthermore, we apply the Material Point Method, which is integrated with physical properties, to the 3D Gaussians to achieve realistic scene deformations. Our method was evaluated on our collected in-house and public surgical videos datasets. Results show that it can reconstruct and simulate surgical scenes from endoscopic videos efficiently-taking only a few minutes to reconstruct the surgical scene-and produce both visually and physically plausible deformations at a speed approaching real-time. The results demonstrate great potential of our proposed method to enhance the efficiency and variety of simulations available for surgical education and robot learning.
Read more8/7/2024