Region-aware Grasp Framework with Normalized Grasp Space for 6-DoF Grasping in Cluttered Scene

0
Sign in to get full access
Overview
- This research paper proposes a Region-aware Grasp Framework (RGF) with a Normalized Grasp Space (NGS) for 6-degree of freedom (6-DoF) grasping in cluttered scenes.
- The key contributions include a region-aware grasp generation approach, a novel grasp representation, and an efficient grasp optimization process.
- The proposed method aims to enable robust and reliable grasping of objects in complex, cluttered environments using a 6-DoF robotic gripper.
Plain English Explanation
The paper presents a new system for robots to pick up objects in messy, crowded scenes. Traditionally, robotic grasping systems have struggled with this task, as it can be challenging to identify good grasping points on objects when they are surrounded by other items.
To address this, the researchers developed a Region-aware Grasp Framework (RGF) that analyzes the surrounding area of an object to identify the best places for the robot to grab it. This "region-aware" approach helps the robot avoid obstacles and find stable grasping points, even when the object is in a cluttered environment.
The researchers also introduced a new way to represent the possible grasping positions and orientations, called a Normalized Grasp Space (NGS). This allows the system to efficiently explore and optimize the grasping options, leading to more reliable and robust grasping.
By combining the region-aware approach with the improved grasp representation, the researchers were able to create a 6-DoF grasping system that performs well even when objects are surrounded by clutter. This could be very useful for real-world robotic applications, such as warehouse automation or household assistants.
Technical Explanation
The proposed Region-aware Grasp Framework (RGF) consists of three key components:
-
Region-aware Grasp Generation: This module analyzes the object of interest and its surrounding region to identify potential grasping points. It takes into account both the object shape and the nearby obstacles to find stable, collision-free grasping locations.
-
Normalized Grasp Space (NGS): The researchers introduce a new grasp representation that normalizes the 6-DoF grasp space, allowing for efficient exploration and optimization of grasping options. This addresses the challenges of the high-dimensional grasp space.
-
Grasp Optimization: An optimization process is used to refine the generated grasps, considering factors like grasp stability, collision avoidance, and task-specific requirements. This helps ensure the selected grasps are reliable and practical for real-world use.
The experiments conducted in the paper demonstrate the effectiveness of the RGF approach compared to prior 6-DoF grasping methods, such as ICGNet and CenterGrasp. The RGF achieves higher grasp success rates, particularly in cluttered scenes, by leveraging the region-aware and normalized grasp space components.
Critical Analysis
The paper presents a thoughtful and well-designed approach to the challenging problem of 6-DoF grasping in cluttered environments. The key strengths of the work include the region-aware grasp generation and the novel grasp representation using the Normalized Grasp Space.
However, the paper does not delve into the potential limitations or caveats of the proposed method. For example, it would be helpful to understand the computational complexity of the grasp optimization process, as this could be a bottleneck for real-time applications. Additionally, the paper does not discuss the robustness of the system to sensor noise or unexpected changes in the environment, which are crucial considerations for real-world deployment.
Furthermore, the authors could have provided a more in-depth comparison to other state-of-the-art 6-DoF grasping techniques, such as Efficient Heatmap-Guided 6-DoF Grasp Detection or Constrained 6-DoF Grasp Generation for Complex Shapes. This would help readers better understand the unique advantages and potential tradeoffs of the RGF approach.
Conclusion
The Region-aware Grasp Framework (RGF) with Normalized Grasp Space (NGS) proposed in this paper represents a significant step forward in enabling robust and reliable 6-DoF grasping in cluttered scenes. By incorporating a region-aware approach and a novel grasp representation, the researchers have developed a system that can effectively identify stable grasping points, even when objects are surrounded by other objects.
The promising results demonstrated in the paper suggest that this technology could have important real-world applications, such as in warehouse automation or household assistive robots. As the field of robotics continues to advance, techniques like the RGF will play a crucial role in enabling robots to interact with and manipulate objects in complex, unstructured environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Region-aware Grasp Framework with Normalized Grasp Space for 6-DoF Grasping in Cluttered Scene
Siang Chen, Pengwei Xie, Wei Tang, Dingchang Hu, Yixiang Dai, Guijin Wang
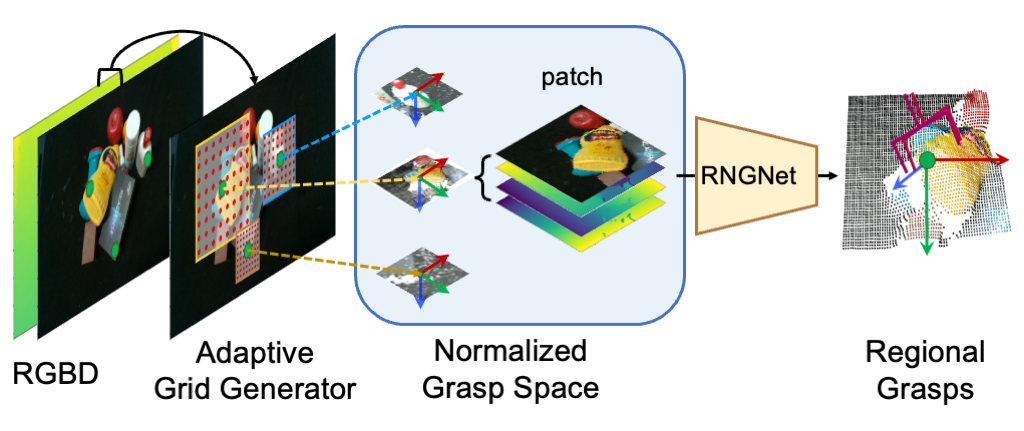
A series of region-based methods succeed in extracting regional features and enhancing grasp detection quality. However, faced with a cluttered scene with potential collision, the definition of the grasp-relevant region stays inconsistent, and the relationship between grasps and regional spaces remains incompletely investigated. In this paper, we propose Normalized Grasp Space (NGS) from a novel region-aware viewpoint, unifying the grasp representation within a normalized regional space and benefiting the generalizability of methods. Leveraging the NGS, we find that CNNs are underestimated for 3D feature extraction and 6-DoF grasp detection in clutter scenes and build a highly efficient Region-aware Normalized Grasp Network (RNGNet). Experiments on the public benchmark show that our method achieves significant >20% performance gains while attaining a real-time inference speed of approximately 50 FPS. Real-world cluttered scene clearance experiments underscore the effectiveness of our method. Further, human-to-robot handover and dynamic object grasping experiments demonstrate the potential of our proposed method for closed-loop grasping in dynamic scenarios.
Read more9/6/2024

0
Learning Any-View 6DoF Robotic Grasping in Cluttered Scenes via Neural Surface Rendering
Snehal Jauhri, Ishikaa Lunawat, Georgia Chalvatzaki
A significant challenge for real-world robotic manipulation is the effective 6DoF grasping of objects in cluttered scenes from any single viewpoint without the need for additional scene exploration. This work reinterprets grasping as rendering and introduces NeuGraspNet, a novel method for 6DoF grasp detection that leverages advances in neural volumetric representations and surface rendering. It encodes the interaction between a robot's end-effector and an object's surface by jointly learning to render the local object surface and learning grasping functions in a shared feature space. The approach uses global (scene-level) features for grasp generation and local (grasp-level) neural surface features for grasp evaluation. This enables effective, fully implicit 6DoF grasp quality prediction, even in partially observed scenes. NeuGraspNet operates on random viewpoints, common in mobile manipulation scenarios, and outperforms existing implicit and semi-implicit grasping methods. The real-world applicability of the method has been demonstrated with a mobile manipulator robot, grasping in open, cluttered spaces. Project website at https://sites.google.com/view/neugraspnet
Read more5/30/2024

0
Graspness Discovery in Clutters for Fast and Accurate Grasp Detection
Chenxi Wang, Hao-Shu Fang, Minghao Gou, Hongjie Fang, Jin Gao, Cewu Lu
Efficient and robust grasp pose detection is vital for robotic manipulation. For general 6 DoF grasping, conventional methods treat all points in a scene equally and usually adopt uniform sampling to select grasp candidates. However, we discover that ignoring where to grasp greatly harms the speed and accuracy of current grasp pose detection methods. In this paper, we propose graspness, a quality based on geometry cues that distinguishes graspable areas in cluttered scenes. A look-ahead searching method is proposed for measuring the graspness and statistical results justify the rationality of our method. To quickly detect graspness in practice, we develop a neural network named cascaded graspness model to approximate the searching process. Extensive experiments verify the stability, generality and effectiveness of our graspness model, allowing it to be used as a plug-and-play module for different methods. A large improvement in accuracy is witnessed for various previous methods after equipping our graspness model. Moreover, we develop GSNet, an end-to-end network that incorporates our graspness model for early filtering of low-quality predictions. Experiments on a large-scale benchmark, GraspNet-1Billion, show that our method outperforms previous arts by a large margin (30+ AP) and achieves a high inference speed. The library of GSNet has been integrated into AnyGrasp, which is at https://github.com/graspnet/anygrasp_sdk.
Read more6/18/2024

0
6-DoF Grasp Detection in Clutter with Enhanced Receptive Field and Graspable Balance Sampling
Hanwen Wang, Ying Zhang, Yunlong Wang, Jian Li
6-DoF grasp detection of small-scale grasps is crucial for robots to perform specific tasks. This paper focuses on enhancing the recognition capability of small-scale grasping, aiming to improve the overall accuracy of grasping prediction results and the generalization ability of the network. We propose an enhanced receptive field method that includes a multi-radii cylinder grouping module and a passive attention module. This method enhances the receptive field area within the graspable space and strengthens the learning of graspable features. Additionally, we design a graspable balance sampling module based on a segmentation network, which enables the network to focus on features of small objects, thereby improving the recognition capability of small-scale grasping. Our network achieves state-of-the-art performance on the GraspNet-1Billion dataset, with an overall improvement of approximately 10% in average precision@k (AP). Furthermore, we deployed our grasp detection model in pybullet grasping platform, which validates the effectiveness of our method.
Read more7/2/2024