Reinforcement Learning with Generalizable Gaussian Splatting
2404.07950
0
0

Abstract
An excellent representation is crucial for reinforcement learning (RL) performance, especially in vision-based reinforcement learning tasks. The quality of the environment representation directly influences the achievement of the learning task. Previous vision-based RL typically uses explicit or implicit ways to represent environments, such as images, points, voxels, and neural radiance fields. However, these representations contain several drawbacks. They cannot either describe complex local geometries or generalize well to unseen scenes, or require precise foreground masks. Moreover, these implicit neural representations are akin to a ``black box, significantly hindering interpretability. 3D Gaussian Splatting (3DGS), with its explicit scene representation and differentiable rendering nature, is considered a revolutionary change for reconstruction and representation methods. In this paper, we propose a novel Generalizable Gaussian Splatting framework to be the representation of RL tasks, called GSRL. Through validation in the RoboMimic environment, our method achieves better results than other baselines in multiple tasks, improving the performance by 10%, 44%, and 15% compared with baselines on the hardest task. This work is the first attempt to leverage generalizable 3DGS as a representation for RL.
Create account to get full access
Overview
- This research paper explores a new reinforcement learning technique called "Generalizable Gaussian Splatting" that can be used to improve the performance of various tasks, such as visual navigation, object manipulation, and 3D reconstruction.
- The key idea is to use a Gaussian splatting approach to represent and update the agent's belief about the 3D environment, which allows for more efficient and generalizable learning compared to traditional methods.
- The paper presents experimental results demonstrating the effectiveness of this approach on several benchmark tasks, and discusses the potential implications and future research directions.
Plain English Explanation
The paper describes a new way for artificial intelligence (AI) systems to learn and interact with 3D environments, using a technique called "Generalizable Gaussian Splatting." Instead of trying to build a detailed 3D model of the environment from scratch, the AI system uses a more efficient approach that represents the environment as a collection of "splatters" - essentially, blobs of information that capture the key features and properties of the 3D world.
These splatters are modeled as Gaussian distributions, which means they have a bell-shaped curve that describes the likelihood of different features being present in that part of the environment. As the AI system interacts with the environment and gathers more information, it can update and refine these Gaussian splatters, allowing it to build up a more accurate understanding of the 3D world over time.
The key advantage of this Gaussian splatting approach is that it is more generalizable - in other words, the AI system can apply the knowledge it has gained from one environment to help it navigate and interact with new, unfamiliar environments more effectively. This can be particularly useful for tasks like visual navigation, where the AI system needs to be able to quickly adapt to different indoor and outdoor settings.
The paper presents experimental results showing that the Generalizable Gaussian Splatting approach outperforms traditional methods on a variety of 3D tasks, including object manipulation and 3D reconstruction. The authors also discuss how this technique could be combined with other machine learning approaches, such as Gaussian cubes or stylized Gaussian splatting, to further enhance the AI system's capabilities.
Overall, this research represents an exciting new direction in the field of reinforcement learning and 3D perception, with the potential to unlock new applications and opportunities for AI systems to interact with and understand the physical world around them.
Technical Explanation
The key innovation presented in this paper is the use of a Gaussian splatting approach for 3D scene representation and reinforcement learning. Traditional reinforcement learning methods often struggle with efficiently representing and updating the agent's belief about the 3D environment, which can limit their performance and generalization capabilities.
To address this, the authors propose a Generalizable Gaussian Splatting (GGS) framework that represents the 3D environment as a collection of Gaussian "splatters." These splatters encode the agent's belief about the 3D structure, appearance, and other relevant properties of the environment. As the agent interacts with the environment and gathers more observations, it can update these Gaussian splatters to refine its understanding of the 3D world.
The GGS framework includes several key components:
-
Splatter Representation: The 3D environment is represented as a set of Gaussian splatters, where each splatter encodes the agent's belief about the 3D structure, appearance, and other relevant properties of a local region of the environment.
-
Splatter Update: As the agent moves through the environment and collects new observations, it can update the Gaussian splatters to incorporate this new information and refine its understanding of the 3D world.
-
Generalizable Learning: The Gaussian splatting approach allows the agent to learn representations that are more generalizable to new environments, as the Gaussian distributions can capture the underlying statistical properties of the 3D world more effectively than traditional methods.
The authors evaluate the GGS framework on a variety of 3D tasks, including visual navigation, object manipulation, and dense 3D reconstruction. The results demonstrate that the GGS approach outperforms traditional reinforcement learning methods, particularly in terms of sample efficiency and generalization to new environments.
One of the key advantages of the GGS framework is its ability to leverage the statistical properties of the 3D world, encoded in the Gaussian splatters, to enable more efficient and generalizable learning. This can be particularly useful for applications where the agent needs to interact with a wide range of 3D environments, such as in robotic navigation or 3D scene understanding.
Critical Analysis
The Generalizable Gaussian Splatting approach presented in this paper is a promising new direction for reinforcement learning and 3D perception, but there are a few potential limitations and areas for further research:
-
Scalability: While the Gaussian splatting approach can be more efficient than traditional 3D representations, the computational complexity of updating and maintaining a large number of splatters could still be a challenge, especially in large-scale or highly complex environments.
-
Uncertainty Representation: The paper focuses on representing the agent's belief about the 3D environment using Gaussian distributions, but there may be other ways to capture uncertainty and partial observability that could be more effective in certain scenarios.
-
Sensor Modalities: The experiments in the paper primarily focus on visual inputs, but the GGS framework could potentially be extended to incorporate other sensor modalities, such as depth, touch, or audio, to further enhance the agent's understanding of the 3D world.
-
Interpretability: While the Gaussian splatting approach can lead to more efficient and generalizable learning, the internal representations may be less interpretable than traditional 3D models, which could be a concern for certain applications where transparency and explainability are important.
Despite these potential limitations, the Generalizable Gaussian Splatting approach represents an exciting new direction in the field of reinforcement learning and 3D perception. By leveraging the statistical properties of the 3D world, this technique has the potential to unlock new capabilities for AI systems to interact with and understand the physical environment around them.
Conclusion
The Generalizable Gaussian Splatting (GGS) approach presented in this paper offers a novel way for reinforcement learning agents to represent and interact with 3D environments. By modeling the environment as a collection of Gaussian splatters, the GGS framework allows for more efficient and generalizable learning, enabling the agent to adapt to new environments more effectively.
The experimental results demonstrate the potential of this approach, with the GGS agent outperforming traditional methods on a variety of 3D tasks, including visual navigation, object manipulation, and 3D reconstruction. While there are still some challenges to address, such as scalability and interpretability, the GGS framework represents an important step forward in the field of reinforcement learning and 3D perception.
As AI systems continue to advance, the ability to efficiently understand and interact with the 3D world will become increasingly crucial for a wide range of applications, from robotics and autonomous vehicles to virtual and augmented reality. The Generalizable Gaussian Splatting approach presented in this paper offers a promising new direction for unlocking these capabilities and driving further progress in the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Query-based Semantic Gaussian Field for Scene Representation in Reinforcement Learning
Jiaxu Wang, Ziyi Zhang, Qiang Zhang, Jia Li, Jingkai Sun, Mingyuan Sun, Junhao He, Renjing Xu
0
0
Latent scene representation plays a significant role in training reinforcement learning (RL) agents. To obtain good latent vectors describing the scenes, recent works incorporate the 3D-aware latent-conditioned NeRF pipeline into scene representation learning. However, these NeRF-related methods struggle to perceive 3D structural information due to the inefficient dense sampling in volumetric rendering. Moreover, they lack fine-grained semantic information included in their scene representation vectors because they evenly consider free and occupied spaces. Both of them can destroy the performance of downstream RL tasks. To address the above challenges, we propose a novel framework that adopts the efficient 3D Gaussian Splatting (3DGS) to learn 3D scene representation for the first time. In brief, we present the Query-based Generalizable 3DGS to bridge the 3DGS technique and scene representations with more geometrical awareness than those in NeRFs. Moreover, we present the Hierarchical Semantics Encoding to ground the fine-grained semantic features to 3D Gaussians and further distilled to the scene representation vectors. We conduct extensive experiments on two RL platforms including Maniskill2 and Robomimic across 10 different tasks. The results show that our method outperforms the other 5 baselines by a large margin. We achieve the best success rates on 8 tasks and the second-best on the other two tasks.
6/11/2024
Recent Advances in 3D Gaussian Splatting
Tong Wu, Yu-Jie Yuan, Ling-Xiao Zhang, Jie Yang, Yan-Pei Cao, Ling-Qi Yan, Lin Gao
0
0
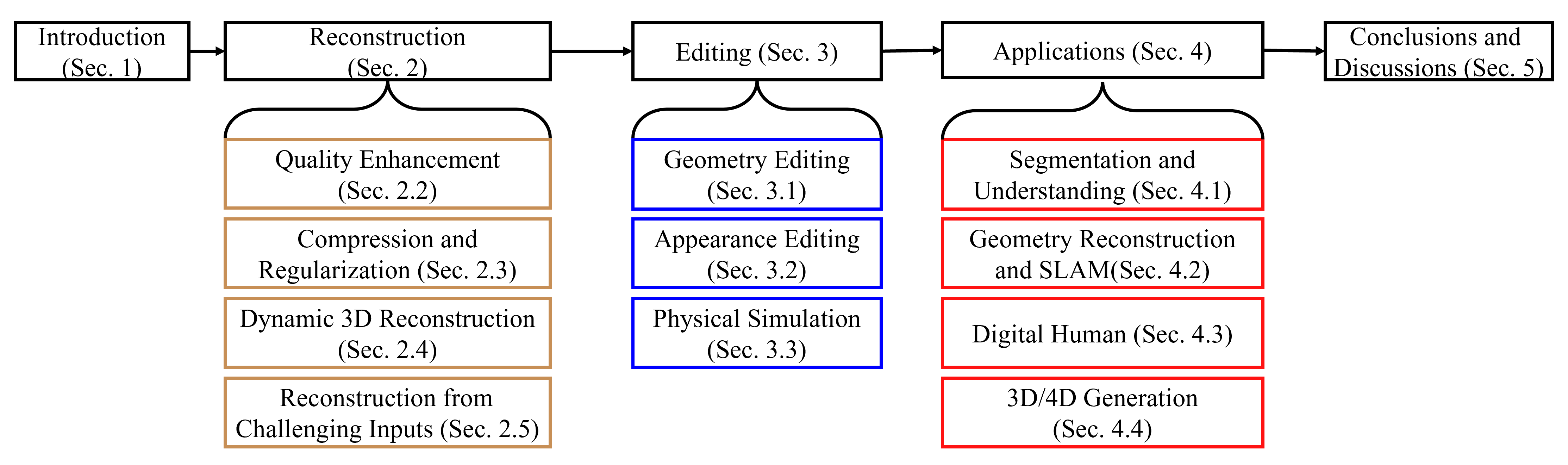
The emergence of 3D Gaussian Splatting (3DGS) has greatly accelerated the rendering speed of novel view synthesis. Unlike neural implicit representations like Neural Radiance Fields (NeRF) that represent a 3D scene with position and viewpoint-conditioned neural networks, 3D Gaussian Splatting utilizes a set of Gaussian ellipsoids to model the scene so that efficient rendering can be accomplished by rasterizing Gaussian ellipsoids into images. Apart from the fast rendering speed, the explicit representation of 3D Gaussian Splatting facilitates editing tasks like dynamic reconstruction, geometry editing, and physical simulation. Considering the rapid change and growing number of works in this field, we present a literature review of recent 3D Gaussian Splatting methods, which can be roughly classified into 3D reconstruction, 3D editing, and other downstream applications by functionality. Traditional point-based rendering methods and the rendering formulation of 3D Gaussian Splatting are also illustrated for a better understanding of this technique. This survey aims to help beginners get into this field quickly and provide experienced researchers with a comprehensive overview, which can stimulate the future development of the 3D Gaussian Splatting representation.
4/16/2024
↗️
A Survey on 3D Gaussian Splatting
Guikun Chen, Wenguan Wang
0
0
3D Gaussian splatting (GS) has recently emerged as a transformative technique in the realm of explicit radiance field and computer graphics. This innovative approach, characterized by the utilization of millions of learnable 3D Gaussians, represents a significant departure from mainstream neural radiance field approaches, which predominantly use implicit, coordinate-based models to map spatial coordinates to pixel values. 3D GS, with its explicit scene representation and differentiable rendering algorithm, not only promises real-time rendering capability but also introduces unprecedented levels of editability. This positions 3D GS as a potential game-changer for the next generation of 3D reconstruction and representation. In the present paper, we provide the first systematic overview of the recent developments and critical contributions in the domain of 3D GS. We begin with a detailed exploration of the underlying principles and the driving forces behind the emergence of 3D GS, laying the groundwork for understanding its significance. A focal point of our discussion is the practical applicability of 3D GS. By enabling unprecedented rendering speed, 3D GS opens up a plethora of applications, ranging from virtual reality to interactive media and beyond. This is complemented by a comparative analysis of leading 3D GS models, evaluated across various benchmark tasks to highlight their performance and practical utility. The survey concludes by identifying current challenges and suggesting potential avenues for future research in this domain. Through this survey, we aim to provide a valuable resource for both newcomers and seasoned researchers, fostering further exploration and advancement in applicable and explicit radiance field representation.
4/16/2024
🗣️
Direct Learning of Mesh and Appearance via 3D Gaussian Splatting
Ancheng Lin, Jun Li
0
0
Accurately reconstructing a 3D scene including explicit geometry information is both attractive and challenging. Geometry reconstruction can benefit from incorporating differentiable appearance models, such as Neural Radiance Fields and 3D Gaussian Splatting (3DGS). In this work, we propose a learnable scene model that incorporates 3DGS with an explicit geometry representation, namely a mesh. Our model learns the mesh and appearance in an end-to-end manner, where we bind 3D Gaussians to the mesh faces and perform differentiable rendering of 3DGS to obtain photometric supervision. The model creates an effective information pathway to supervise the learning of the scene, including the mesh. Experimental results demonstrate that the learned scene model not only achieves state-of-the-art rendering quality but also supports manipulation using the explicit mesh. In addition, our model has a unique advantage in adapting to scene updates, thanks to the end-to-end learning of both mesh and appearance.
5/14/2024