Reliable Student: Addressing Noise in Semi-Supervised 3D Object Detection
2404.17910
0
0
🔎
Abstract
Semi-supervised 3D object detection can benefit from the promising pseudo-labeling technique when labeled data is limited. However, recent approaches have overlooked the impact of noisy pseudo-labels during training, despite efforts to enhance pseudo-label quality through confidence-based filtering. In this paper, we examine the impact of noisy pseudo-labels on IoU-based target assignment and propose the Reliable Student framework, which incorporates two complementary approaches to mitigate errors. First, it involves a class-aware target assignment strategy that reduces false negative assignments in difficult classes. Second, it includes a reliability weighting strategy that suppresses false positive assignment errors while also addressing remaining false negatives from the first step. The reliability weights are determined by querying the teacher network for confidence scores of the student-generated proposals. Our work surpasses the previous state-of-the-art on KITTI 3D object detection benchmark on point clouds in the semi-supervised setting. On 1% labeled data, our approach achieves a 6.2% AP improvement for the pedestrian class, despite having only 37 labeled samples available. The improvements become significant for the 2% setting, achieving 6.0% AP and 5.7% AP improvements for the pedestrian and cyclist classes, respectively.
Create account to get full access
Overview
- This paper examines the impact of noisy pseudo-labels on 3D object detection in a semi-supervised learning setting, where labeled data is limited.
- The authors propose the Reliable Student framework, which introduces two complementary approaches to mitigate the errors caused by noisy pseudo-labels during training.
- The proposed techniques lead to state-of-the-art performance on the KITTI 3D object detection benchmark, particularly for the pedestrian and cyclist classes, even with limited labeled data.
Plain English Explanation
3D object detection is the task of identifying and localizing objects in 3D space, which is crucial for applications like self-driving cars and augmented reality. When labeled 3D data is scarce, semi-supervised learning techniques can be used to leverage unlabeled data by generating "pseudo-labels" - predictions made by a model that are treated as ground truth during training.
However, these pseudo-labels can be noisy and contain errors, which can negatively impact the training process. The authors of this paper noticed that previous approaches have not adequately addressed the problems caused by noisy pseudo-labels.
To address this, the researchers developed the Reliable Student framework, which has two main components:
- A class-aware target assignment strategy: This helps reduce false negative assignments (missed detections) for difficult object classes, like pedestrians.
- A reliability weighting strategy: This suppresses false positive assignment errors (incorrect detections) while also addressing remaining false negatives from the first step. The reliability weights are determined by querying a "teacher" network for confidence scores on the student-generated proposals.
By incorporating these techniques, the Reliable Student framework was able to achieve significant improvements in 3D object detection performance, especially for pedestrians and cyclists, even when only a small amount of labeled data was available.
Technical Explanation
The paper proposes the Reliable Student framework to address the impact of noisy pseudo-labels in semi-supervised 3D object detection. The key components of the framework are:
-
Class-aware Target Assignment: In standard IoU-based target assignment, objects in difficult classes (like pedestrians) are more likely to be assigned false negative targets due to their smaller size and occlusions. The authors introduce a class-aware strategy that adjusts the assignment threshold based on the object class, reducing these false negatives.
-
Reliability Weighting: The framework also includes a reliability weighting strategy to address both false positive and remaining false negative assignments. The reliability weights are determined by querying a "teacher" network, which provides confidence scores for the student-generated proposals. This helps suppress false positive assignments while also addressing any remaining false negatives from the class-aware assignment step.
The authors evaluate their Reliable Student framework on the KITTI 3D object detection benchmark using point cloud data. Their approach outperforms previous state-of-the-art semi-supervised methods, particularly for the pedestrian and cyclist classes. For example, on 1% labeled data, they achieve a 6.2% AP improvement for pedestrians, and on 2% labeled data, they achieve 6.0% and 5.7% AP improvements for pedestrians and cyclists, respectively.
Critical Analysis
The Reliable Student framework presents a promising approach to mitigate the impact of noisy pseudo-labels in semi-supervised 3D object detection. By addressing the challenges of false negative and false positive assignments, the authors demonstrate significant performance gains, especially for difficult object classes.
However, the paper does not provide a comprehensive analysis of the limitations of the proposed approach. For instance, it would be valuable to understand how the framework performs on other datasets or in different semi-supervised settings, such as weakly-supervised 3D object detection or unsupervised domain adaptation.
Additionally, the authors mention that their class-aware target assignment strategy is inspired by common sense prototype-based 3D object detection, but it would be helpful to understand how their approach differs and what specific insights were gained from this prior work.
Overall, the Reliable Student framework is a valuable contribution to the field of semi-supervised 3D object detection, but further research is needed to fully understand its limitations and potential for broader applicability.
Conclusion
This paper introduces the Reliable Student framework, which addresses the impact of noisy pseudo-labels in semi-supervised 3D object detection. By incorporating a class-aware target assignment strategy and a reliability weighting approach, the framework is able to achieve state-of-the-art performance on the KITTI benchmark, particularly for the pedestrian and cyclist classes, even with limited labeled data.
The proposed techniques demonstrate the importance of carefully managing the quality of pseudo-labels during training, and the authors' insights can potentially be applied to other semi-supervised or weakly-supervised learning scenarios. As the field of 3D perception continues to advance, approaches like Reliable Student that can effectively leverage unlabeled data will become increasingly crucial for building robust and accurate systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Power of Cooperative Supervision: Multiple Teachers Framework for Enhanced 3D Semi-Supervised Object Detection
Jin-Hee Lee, Jae-Keun Lee, Je-Seok Kim, Soon Kwon
0
0
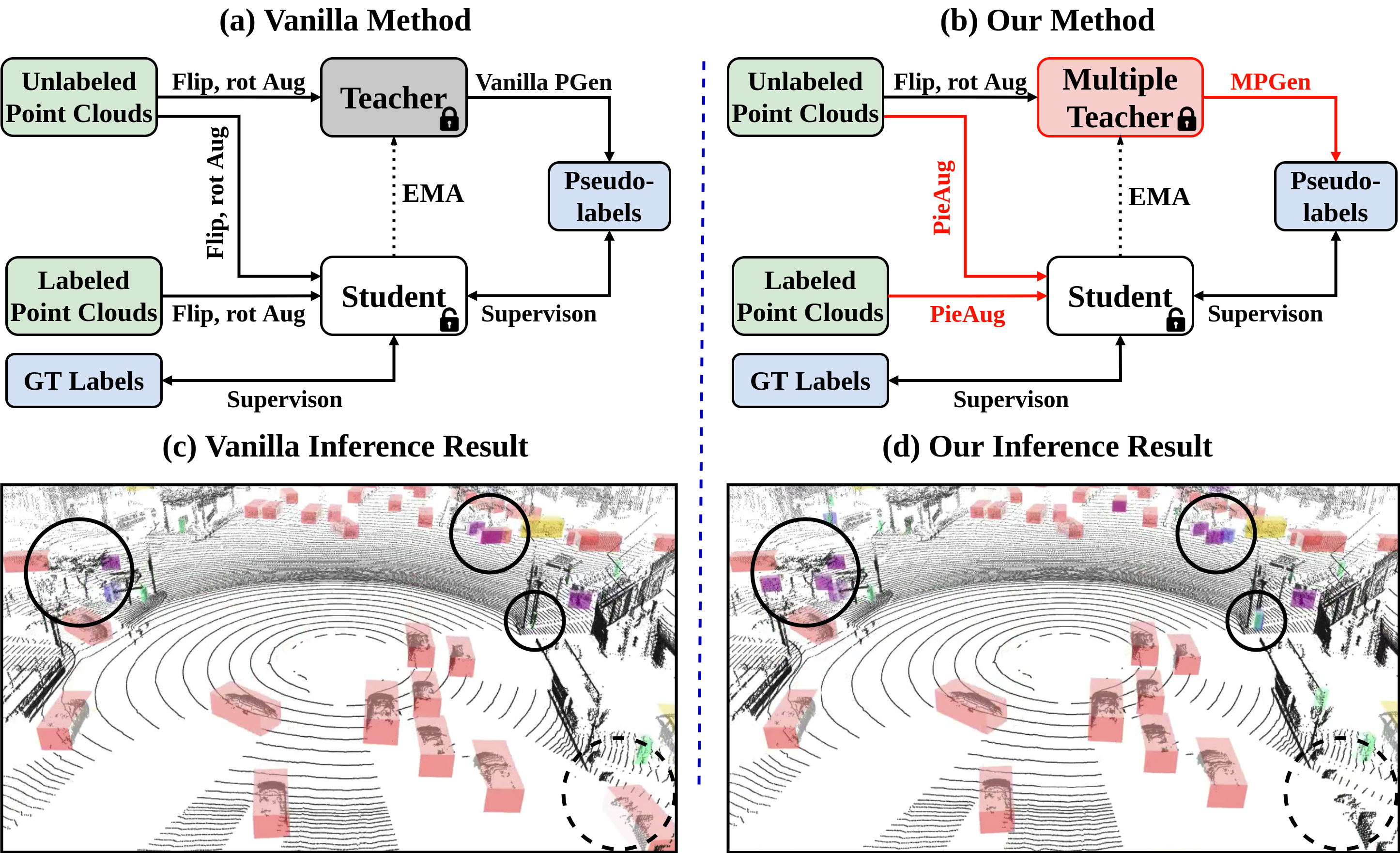
To ensure safe urban driving for autonomous platforms, it is crucial not only to develop high-performance object detection techniques but also to establish a diverse and representative dataset that captures various urban environments and object characteristics. To address these two issues, we have constructed a multi-class 3D LiDAR dataset reflecting diverse urban environments and object characteristics, and developed a robust 3D semi-supervised object detection (SSOD) based on a multiple teachers framework. This SSOD framework categorizes similar classes and assigns specialized teachers to each category. Through collaborative supervision among these category-specialized teachers, the student network becomes increasingly proficient, leading to a highly effective object detector. We propose a simple yet effective augmentation technique, Pie-based Point Compensating Augmentation (PieAug), to enable the teacher network to generate high-quality pseudo-labels. Extensive experiments on the WOD, KITTI, and our datasets validate the effectiveness of our proposed method and the quality of our dataset. Experimental results demonstrate that our approach consistently outperforms existing state-of-the-art 3D semi-supervised object detection methods across all datasets. We plan to release our multi-class LiDAR dataset and the source code available on our Github repository in the near future.
6/3/2024

Decoupled Pseudo-labeling for Semi-Supervised Monocular 3D Object Detection
Jiacheng Zhang, Jiaming Li, Xiangru Lin, Wei Zhang, Xiao Tan, Junyu Han, Errui Ding, Jingdong Wang, Guanbin Li
0
0
We delve into pseudo-labeling for semi-supervised monocular 3D object detection (SSM3OD) and discover two primary issues: a misalignment between the prediction quality of 3D and 2D attributes and the tendency of depth supervision derived from pseudo-labels to be noisy, leading to significant optimization conflicts with other reliable forms of supervision. We introduce a novel decoupled pseudo-labeling (DPL) approach for SSM3OD. Our approach features a Decoupled Pseudo-label Generation (DPG) module, designed to efficiently generate pseudo-labels by separately processing 2D and 3D attributes. This module incorporates a unique homography-based method for identifying dependable pseudo-labels in BEV space, specifically for 3D attributes. Additionally, we present a DepthGradient Projection (DGP) module to mitigate optimization conflicts caused by noisy depth supervision of pseudo-labels, effectively decoupling the depth gradient and removing conflicting gradients. This dual decoupling strategy-at both the pseudo-label generation and gradient levels-significantly improves the utilization of pseudo-labels in SSM3OD. Our comprehensive experiments on the KITTI benchmark demonstrate the superiority of our method over existing approaches.
4/24/2024

Pseudo Label Refinery for Unsupervised Domain Adaptation on Cross-dataset 3D Object Detection
Zhanwei Zhang, Minghao Chen, Shuai Xiao, Liang Peng, Hengjia Li, Binbin Lin, Ping Li, Wenxiao Wang, Boxi Wu, Deng Cai
0
0
Recent self-training techniques have shown notable improvements in unsupervised domain adaptation for 3D object detection (3D UDA). These techniques typically select pseudo labels, i.e., 3D boxes, to supervise models for the target domain. However, this selection process inevitably introduces unreliable 3D boxes, in which 3D points cannot be definitively assigned as foreground or background. Previous techniques mitigate this by reweighting these boxes as pseudo labels, but these boxes can still poison the training process. To resolve this problem, in this paper, we propose a novel pseudo label refinery framework. Specifically, in the selection process, to improve the reliability of pseudo boxes, we propose a complementary augmentation strategy. This strategy involves either removing all points within an unreliable box or replacing it with a high-confidence box. Moreover, the point numbers of instances in high-beam datasets are considerably higher than those in low-beam datasets, also degrading the quality of pseudo labels during the training process. We alleviate this issue by generating additional proposals and aligning RoI features across different domains. Experimental results demonstrate that our method effectively enhances the quality of pseudo labels and consistently surpasses the state-of-the-art methods on six autonomous driving benchmarks. Code will be available at https://github.com/Zhanwei-Z/PERE.
5/1/2024

Label-Efficient 3D Object Detection For Road-Side Units
Minh-Quan Dao, Holger Caesar, Julie Stephany Berrio, Mao Shan, Stewart Worrall, Vincent Fr'emont, Ezio Malis
0
0
Occlusion presents a significant challenge for safety-critical applications such as autonomous driving. Collaborative perception has recently attracted a large research interest thanks to the ability to enhance the perception of autonomous vehicles via deep information fusion with intelligent roadside units (RSU), thus minimizing the impact of occlusion. While significant advancement has been made, the data-hungry nature of these methods creates a major hurdle for their real-world deployment, particularly due to the need for annotated RSU data. Manually annotating the vast amount of RSU data required for training is prohibitively expensive, given the sheer number of intersections and the effort involved in annotating point clouds. We address this challenge by devising a label-efficient object detection method for RSU based on unsupervised object discovery. Our paper introduces two new modules: one for object discovery based on a spatial-temporal aggregation of point clouds, and another for refinement. Furthermore, we demonstrate that fine-tuning on a small portion of annotated data allows our object discovery models to narrow the performance gap with, or even surpass, fully supervised models. Extensive experiments are carried out in simulated and real-world datasets to evaluate our method.
4/10/2024