Retain, Blend, and Exchange: A Quality-aware Spatial-Stereo Fusion Approach for Event Stream Recognition

0

Sign in to get full access
Overview
- The paper presents a quality-aware spatial-stereo fusion approach for event stream recognition using Event Cameras.
- It proposes a novel transformer-based architecture called "Retain, Blend, and Exchange" (RBE) that leverages both spatial and stereo information to enhance event stream classification.
- The RBE model introduces a quality-aware mechanism to selectively retain, blend, and exchange relevant features from multiple views, leading to improved performance on event stream recognition tasks.
- The paper also introduces a new long-term frame-event visual tracking benchmark dataset to evaluate event-based vision systems.
Plain English Explanation
Event cameras are a type of sensor that capture visual information differently than traditional cameras. Instead of taking full frames, they only record changes in the scene, which can be more efficient and provide higher temporal resolution. However, effectively using this kind of data for tasks like object recognition can be challenging.
The researchers developed a new approach called "Retain, Blend, and Exchange" (RBE) that aims to address these challenges. RBE uses a transformer-based neural network [<a href="https://aimodels.fyi/papers/arxiv/event-transformer">Event Transformer</a>] to process the event stream data from multiple camera views.
The key innovations of RBE are:
- Retain: The model selectively retains the most relevant spatial and stereo features from the input event streams.
- Blend: It then blends these features in a quality-aware manner to capture both local and global information.
- Exchange: Finally, the model exchanges information between the spatial and stereo feature representations to further refine the final event stream classification.
By using this "retain, blend, and exchange" approach, the RBE model is able to better utilize the rich spatial and depth cues available in event stream data, leading to improved performance on event recognition tasks. The paper also introduces a new long-term tracking benchmark [<a href="https://aimodels.fyi/papers/arxiv/long-term-frame-event-visual-tracking-benchmark">Long-Term Frame-Event Visual Tracking Benchmark</a>] to evaluate event-based vision systems.
Technical Explanation
The paper proposes a novel Retain, Blend, and Exchange (RBE) architecture for event stream recognition. The RBE model takes as input event streams from multiple camera views (spatial and stereo) and uses a transformer-based [<a href="https://aimodels.fyi/papers/arxiv/event-transformer">Event Transformer</a>] backbone to process the data.
The key components of the RBE model are:
-
Retain: The model first selectively retains the most relevant spatial and stereo features from the input event streams. This is done using a quality-aware attention mechanism that assigns higher weights to more informative features.
-
Blend: The retained features from the spatial and stereo views are then blended together in a quality-aware manner. This allows the model to capture both local and global information from the event data.
-
Exchange: Finally, the blended features are passed through an exchange module that facilitates information sharing between the spatial and stereo representations. This helps to further refine the final event stream classification.
The paper also introduces a new long-term frame-event visual tracking benchmark dataset [<a href="https://aimodels.fyi/papers/arxiv/long-term-frame-event-visual-tracking-benchmark">Long-Term Frame-Event Visual Tracking Benchmark</a>] to evaluate the performance of event-based vision systems. This dataset provides a more realistic and challenging evaluation scenario compared to previous benchmarks.
Critical Analysis
The RBE approach presented in the paper is a promising step towards improving event stream recognition by leveraging both spatial and stereo information. The quality-aware feature retention and blending mechanisms are novel contributions that help the model focus on the most relevant aspects of the event data.
However, the paper does not deeply explore the potential limitations or failure cases of the RBE model. For example, it would be interesting to understand how the model's performance is affected by factors such as event noise, sensor misalignment, or extreme lighting conditions. Additionally, the paper could have provided more insights into the model's interpretability and the specific types of features it learns to prioritize.
It would also be valuable for the authors to compare the RBE approach to other state-of-the-art event-based vision techniques, such as those using [<a href="https://aimodels.fyi/papers/arxiv/evggs-collaborative-learning-framework-event-based-generalizable">collaborative learning</a>] or [<a href="https://aimodels.fyi/papers/arxiv/tenet-targetness-entanglement-incorporating-multi-scale-pooling">multi-scale pooling</a>] strategies, to better understand its relative strengths and weaknesses.
Overall, the RBE model presents an interesting and potentially impactful approach to event stream recognition, but further research is needed to fully evaluate its capabilities and limitations.
Conclusion
The "Retain, Blend, and Exchange" (RBE) model proposed in this paper is a novel approach to leveraging both spatial and stereo information for event stream recognition. By selectively retaining the most relevant features, blending them in a quality-aware manner, and exchanging information between the spatial and stereo representations, the RBE model is able to achieve improved performance on event-based vision tasks.
The introduction of the long-term frame-event visual tracking benchmark dataset also provides a valuable new resource for evaluating event-based vision systems in more realistic and challenging scenarios. While the paper presents promising results, further research is needed to fully understand the limitations and potential of the RBE approach, as well as how it compares to other state-of-the-art event-based vision techniques.
Overall, this work represents an important contribution to the field of event-based vision, and the ideas and techniques presented could have a significant impact on the development of more robust and effective event recognition systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Retain, Blend, and Exchange: A Quality-aware Spatial-Stereo Fusion Approach for Event Stream Recognition
Lan Chen, Dong Li, Xiao Wang, Pengpeng Shao, Wei Zhang, Yaowei Wang, Yonghong Tian, Jin Tang
Existing event stream-based pattern recognition models usually represent the event stream as the point cloud, voxel, image, etc., and design various deep neural networks to learn their features. Although considerable results can be achieved in simple cases, however, the model performance may be limited by monotonous modality expressions, sub-optimal fusion, and readout mechanisms. In this paper, we propose a novel dual-stream framework for event stream-based pattern recognition via differentiated fusion, termed EFV++. It models two common event representations simultaneously, i.e., event images and event voxels. The spatial and three-dimensional stereo information can be learned separately by utilizing Transformer and Graph Neural Network (GNN). We believe the features of each representation still contain both efficient and redundant features and a sub-optimal solution may be obtained if we directly fuse them without differentiation. Thus, we divide each feature into three levels and retain high-quality features, blend medium-quality features, and exchange low-quality features. The enhanced dual features will be fed into the fusion Transformer together with bottleneck features. In addition, we introduce a novel hybrid interaction readout mechanism to enhance the diversity of features as final representations. Extensive experiments demonstrate that our proposed framework achieves state-of-the-art performance on multiple widely used event stream-based classification datasets. Specifically, we achieve new state-of-the-art performance on the Bullying10k dataset, i.e., $90.51%$, which exceeds the second place by $+2.21%$. The source code of this paper has been released on url{https://github.com/Event-AHU/EFV_event_classification/tree/EFVpp}.
Read more6/28/2024
🛠️
0
Event Voxel Set Transformer for Spatiotemporal Representation Learning on Event Streams
Bochen Xie, Yongjian Deng, Zhanpeng Shao, Qingsong Xu, Youfu Li
Event cameras are neuromorphic vision sensors that record a scene as sparse and asynchronous event streams. Most event-based methods project events into dense frames and process them using conventional vision models, resulting in high computational complexity. A recent trend is to develop point-based networks that achieve efficient event processing by learning sparse representations. However, existing works may lack robust local information aggregators and effective feature interaction operations, thus limiting their modeling capabilities. To this end, we propose an attention-aware model named Event Voxel Set Transformer (EVSTr) for efficient spatiotemporal representation learning on event streams. It first converts the event stream into voxel sets and then hierarchically aggregates voxel features to obtain robust representations. The core of EVSTr is an event voxel transformer encoder that consists of two well-designed components, including the Multi-Scale Neighbor Embedding Layer (MNEL) for local information aggregation and the Voxel Self-Attention Layer (VSAL) for global feature interaction. Enabling the network to incorporate a long-range temporal structure, we introduce a segment modeling strategy (S$^{2}$TM) to learn motion patterns from a sequence of segmented voxel sets. The proposed model is evaluated on two recognition tasks, including object classification and action recognition. To provide a convincing model evaluation, we present a new event-based action recognition dataset (NeuroHAR) recorded in challenging scenarios. Comprehensive experiments show that EVSTr achieves state-of-the-art performance while maintaining low model complexity.
Read more9/4/2024
0
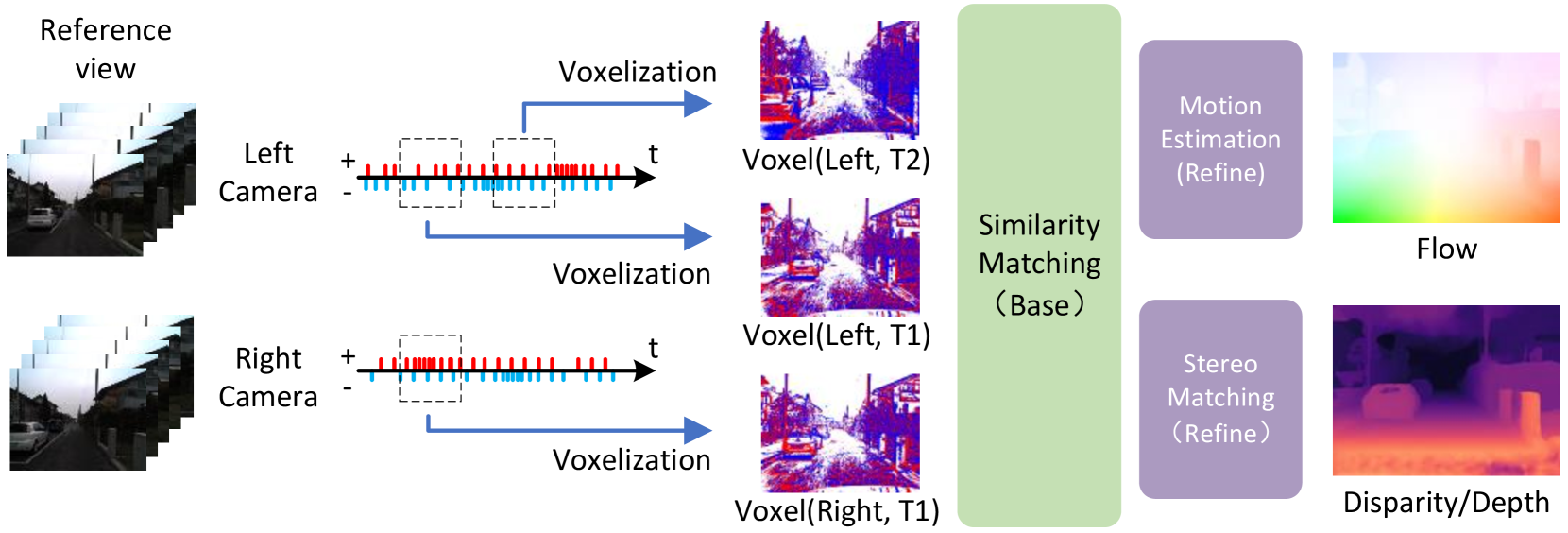
Unifying Event-based Flow, Stereo and Depth Estimation via Feature Similarity Matching
Pengjie Zhang, Lin Zhu, Lizhi Wang, Hua Huang
As an emerging vision sensor, the event camera has gained popularity in various vision tasks such as optical flow estimation, stereo matching, and depth estimation due to its high-speed, sparse, and asynchronous event streams. Unlike traditional approaches that use specialized architectures for each specific task, we propose a unified framework, EventMatch, that reformulates these tasks as an event-based dense correspondence matching problem, allowing them to be solved with a single model by directly comparing feature similarities. By utilizing a shared feature similarities module, which integrates knowledge from other event flows via temporal or spatial interactions, and distinct task heads, our network can concurrently perform optical flow estimation from temporal inputs (e.g., two segments of event streams in the temporal domain) and stereo matching from spatial inputs (e.g., two segments of event streams from different viewpoints in the spatial domain). Moreover, we further demonstrate that our unified model inherently supports cross-task transfer since the architecture and parameters are shared across tasks. Without the need for retraining on each task, our model can effectively handle both optical flow and disparity estimation simultaneously. The experiment conducted on the DSEC benchmark demonstrates that our model exhibits superior performance in both optical flow and disparity estimation tasks, outperforming existing state-of-the-art methods. Our unified approach not only advances event-based models but also opens new possibilities for cross-task transfer and inter-task fusion in both spatial and temporal dimensions. Our code will be available later.
Read more8/1/2024
📶
0
Event Transformer
Bin Jiang, Zhihao Li, M. Salman Asif, Xun Cao, Zhan Ma
The event camera's low power consumption and ability to capture microsecond brightness changes make it attractive for various computer vision tasks. Existing event representation methods typically convert events into frames, voxel grids, or spikes for deep neural networks (DNNs). However, these approaches often sacrifice temporal granularity or require specialized devices for processing. This work introduces a novel token-based event representation, where each event is considered a fundamental processing unit termed an event-token. This approach preserves the sequence's intricate spatiotemporal attributes at the event level. Moreover, we propose a Three-way Attention mechanism in the Event Transformer Block (ETB) to collaboratively construct temporal and spatial correlations between events. We compare our proposed token-based event representation extensively with other prevalent methods for object classification and optical flow estimation. The experimental results showcase its competitive performance while demanding minimal computational resources on standard devices. Our code is publicly accessible at url{https://github.com/NJUVISION/EventTransformer}.
Read more6/13/2024