RoboFusion: Towards Robust Multi-Modal 3D Object Detection via SAM
2401.03907
0
1
🔎
Abstract
Multi-modal 3D object detectors are dedicated to exploring secure and reliable perception systems for autonomous driving (AD).Although achieving state-of-the-art (SOTA) performance on clean benchmark datasets, they tend to overlook the complexity and harsh conditions of real-world environments. With the emergence of visual foundation models (VFMs), opportunities and challenges are presented for improving the robustness and generalization of multi-modal 3D object detection in AD. Therefore, we propose RoboFusion, a robust framework that leverages VFMs like SAM to tackle out-of-distribution (OOD) noise scenarios. We first adapt the original SAM for AD scenarios named SAM-AD. To align SAM or SAM-AD with multi-modal methods, we then introduce AD-FPN for upsampling the image features extracted by SAM. We employ wavelet decomposition to denoise the depth-guided images for further noise reduction and weather interference. At last, we employ self-attention mechanisms to adaptively reweight the fused features, enhancing informative features while suppressing excess noise. In summary, RoboFusion significantly reduces noise by leveraging the generalization and robustness of VFMs, thereby enhancing the resilience of multi-modal 3D object detection. Consequently, RoboFusion achieves SOTA performance in noisy scenarios, as demonstrated by the KITTI-C and nuScenes-C benchmarks. Code is available at https://github.com/adept-thu/RoboFusion.
Create account to get full access
Overview
- This paper proposes a robust framework called RoboFusion for improving the performance of multi-modal 3D object detectors in autonomous driving scenarios, especially under noisy or out-of-distribution (OOD) conditions.
- RoboFusion leverages the generalization and robustness of visual foundation models (VFMs) like the Segment Anything Model (SAM) to tackle challenging real-world environments.
- The key innovations include adapting SAM for autonomous driving (SAM-AD), introducing AD-FPN for aligning SAM with multi-modal methods, employing wavelet decomposition to denoise depth-guided images, and using self-attention to enhance informative features.
Plain English Explanation
Autonomous driving systems need to be able to reliably detect objects in their surroundings, even in complex and unpredictable real-world conditions. However, current multi-modal 3D object detectors tend to perform well only on clean benchmark datasets, and struggle with the harsh conditions of actual driving environments.
To address this, the researchers developed RoboFusion, a framework that leverages powerful visual foundation models (VFMs) like the Segment Anything Model (SAM) to make multi-modal 3D object detection more robust and adaptable.
The key ideas behind RoboFusion are:
- Adapting SAM for Autonomous Driving: The researchers modified the original SAM model to work better in autonomous driving scenarios, creating SAM-AD.
- Aligning SAM with Multi-modal Methods: They developed a module called AD-FPN to integrate the image features extracted by SAM-AD with the other sensor data used by multi-modal 3D object detectors.
- Denoising Depth-guided Images: Wavelet decomposition is used to remove noise and weather-related interference from the depth information used by the system.
- Enhancing Informative Features: Self-attention mechanisms are employed to automatically identify and amplify the most useful features while suppressing irrelevant ones, further improving the system's robustness.
By gradually reducing noise and leveraging the power of VFMs, RoboFusion aims to make multi-modal 3D object detection more resilient to the challenges of real-world autonomous driving scenarios.
Technical Explanation
The researchers propose RoboFusion, a robust framework for multi-modal 3D object detection in autonomous driving. RoboFusion builds on the success of visual foundation models (VFMs) like the Segment Anything Model (SAM) to enhance the performance of multi-modal 3D object detectors in noisy, out-of-distribution (OOD) conditions.
First, the authors adapt the original SAM model for autonomous driving scenarios, creating SAM-AD. To align SAM-AD with multi-modal 3D object detection methods, they introduce AD-FPN, which upsamples the image features extracted by SAM-AD to match the resolution of the other sensor data.
Next, the researchers employ wavelet decomposition to denoise the depth-guided images used by the multi-modal detector, reducing the impact of weather-related interference and other noise.
Finally, the authors leverage self-attention mechanisms to adaptively reweight the fused multi-modal features, highlighting the most informative components while suppressing excess noise. This helps the system focus on the relevant cues for accurate 3D object detection.
The researchers evaluate RoboFusion on the KITTI-C and nuScenes-C benchmarks, which simulate challenging OOD scenarios. RoboFusion achieves state-of-the-art performance, demonstrating its ability to enhance the robustness and generalization of multi-modal 3D object detection for autonomous driving.
Critical Analysis
The researchers have addressed an important challenge in the field of autonomous driving by developing RoboFusion, a framework that improves the performance of multi-modal 3D object detectors under noisy, OOD conditions. The use of VFMs like SAM is a promising approach, as these models have shown strong generalization capabilities.
One potential limitation of the study is that it only evaluates RoboFusion on two specific benchmarks (KITTI-C and nuScenes-C) that simulate OOD scenarios. It would be valuable to test the framework's performance on a wider range of real-world driving conditions to fully assess its robustness and generalization.
Additionally, the paper does not provide a detailed analysis of the computational cost and runtime of RoboFusion, which are crucial factors for deployment in autonomous vehicles. Approaches like OccFusion and UniBEV have also explored efficient multi-modal fusion, and a comparative analysis could provide valuable insights.
Furthermore, the integration of cross-modal attention mechanisms, as explored in Fusion-MAMBA, could potentially enhance the adaptive feature weighting introduced in RoboFusion. Exploring such complementary techniques could further improve the system's robustness and generalization.
Overall, RoboFusion represents a promising step forward in addressing the challenges of multi-modal 3D object detection in autonomous driving. Continued research and testing in diverse real-world scenarios will be crucial to validate the framework's practical applicability and guide future advancements in this critical field.
Conclusion
The RoboFusion framework proposed in this paper aims to enhance the robustness and generalization of multi-modal 3D object detectors for autonomous driving applications. By leveraging the power of visual foundation models (VFMs) like the Segment Anything Model (SAM), RoboFusion introduces several innovations to tackle the challenges of noisy, out-of-distribution (OOD) environments.
The key contributions include adapting SAM for autonomous driving (SAM-AD), aligning SAM-AD with multi-modal methods through AD-FPN, employing wavelet decomposition to denoise depth-guided images, and using self-attention to enhance informative features while suppressing excess noise. Evaluated on KITTI-C and nuScenes-C benchmarks, RoboFusion demonstrates state-of-the-art performance in simulated OOD scenarios.
This research highlights the potential of VFMs to improve the resilience of perception systems for autonomous driving, an essential component for the safe deployment of self-driving vehicles. Continued exploration of efficient multi-modal fusion techniques and extensive testing in diverse real-world conditions will be crucial to further advance the field and bring autonomous driving closer to widespread adoption.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
ContextualFusion: Context-Based Multi-Sensor Fusion for 3D Object Detection in Adverse Operating Conditions
Shounak Sural (Raj), Nishad Sahu (Raj), Ragunathan (Raj), Rajkumar
0
0
The fusion of multimodal sensor data streams such as camera images and lidar point clouds plays an important role in the operation of autonomous vehicles (AVs). Robust perception across a range of adverse weather and lighting conditions is specifically required for AVs to be deployed widely. While multi-sensor fusion networks have been previously developed for perception in sunny and clear weather conditions, these methods show a significant degradation in performance under night-time and poor weather conditions. In this paper, we propose a simple yet effective technique called ContextualFusion to incorporate the domain knowledge about cameras and lidars behaving differently across lighting and weather variations into 3D object detection models. Specifically, we design a Gated Convolutional Fusion (GatedConv) approach for the fusion of sensor streams based on the operational context. To aid in our evaluation, we use the open-source simulator CARLA to create a multimodal adverse-condition dataset called AdverseOp3D to address the shortcomings of existing datasets being biased towards daytime and good-weather conditions. Our ContextualFusion approach yields an mAP improvement of 6.2% over state-of-the-art methods on our context-balanced synthetic dataset. Finally, our method enhances state-of-the-art 3D objection performance at night on the real-world NuScenes dataset with a significant mAP improvement of 11.7%.
4/24/2024
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
0
0
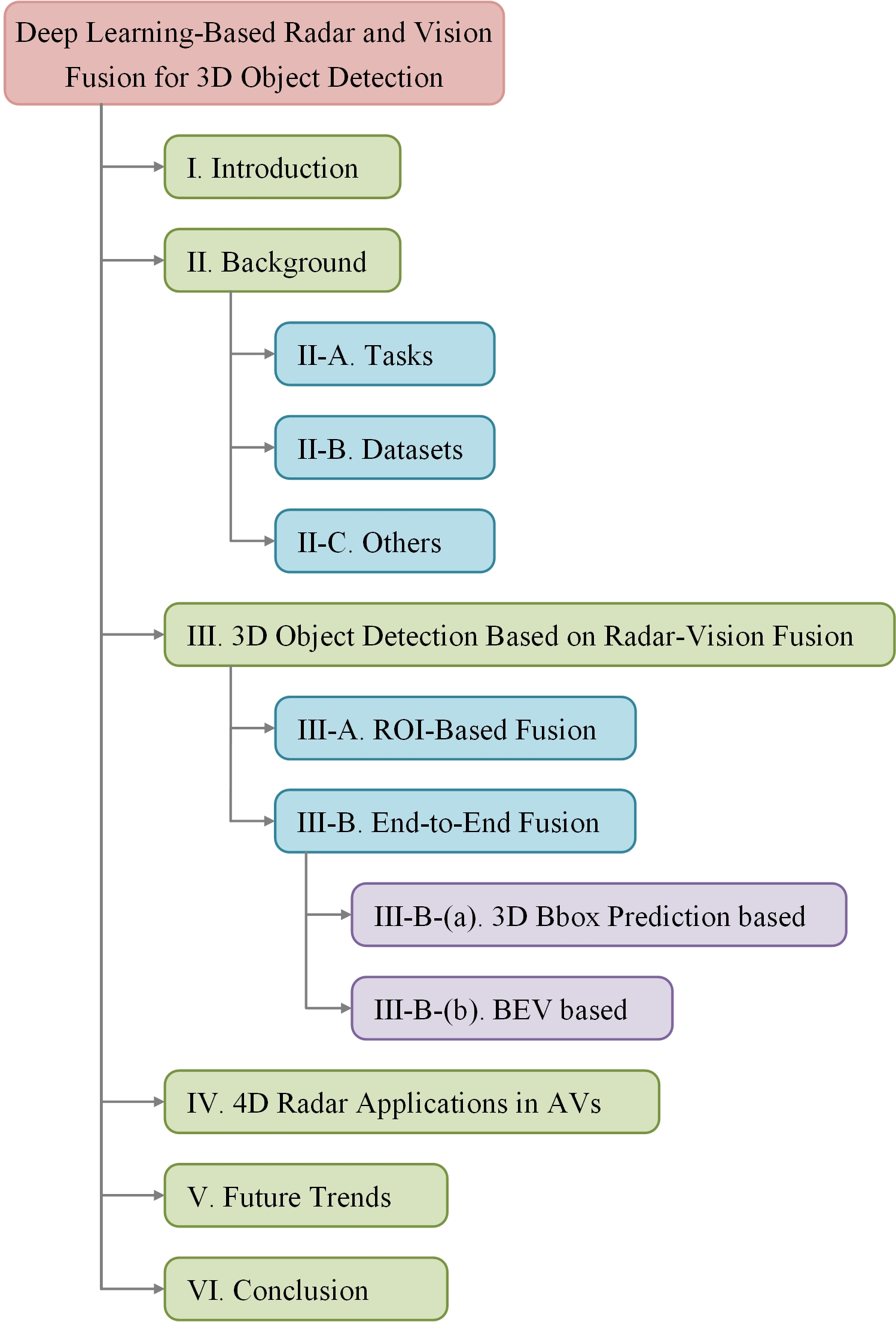
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
6/4/2024
VFMM3D: Releasing the Potential of Image by Vision Foundation Model for Monocular 3D Object Detection
Bonan Ding, Jin Xie, Jing Nie, Jiale Cao
0
0
Due to its cost-effectiveness and widespread availability, monocular 3D object detection, which relies solely on a single camera during inference, holds significant importance across various applications, including autonomous driving and robotics. Nevertheless, directly predicting the coordinates of objects in 3D space from monocular images poses challenges. Therefore, an effective solution involves transforming monocular images into LiDAR-like representations and employing a LiDAR-based 3D object detector to predict the 3D coordinates of objects. The key step in this method is accurately converting the monocular image into a reliable point cloud form. In this paper, we present VFMM3D, an innovative approach that leverages the capabilities of Vision Foundation Models (VFMs) to accurately transform single-view images into LiDAR point cloud representations. VFMM3D utilizes the Segment Anything Model (SAM) and Depth Anything Model (DAM) to generate high-quality pseudo-LiDAR data enriched with rich foreground information. Specifically, the Depth Anything Model (DAM) is employed to generate dense depth maps. Subsequently, the Segment Anything Model (SAM) is utilized to differentiate foreground and background regions by predicting instance masks. These predicted instance masks and depth maps are then combined and projected into 3D space to generate pseudo-LiDAR points. Finally, any object detectors based on point clouds can be utilized to predict the 3D coordinates of objects. Comprehensive experiments are conducted on the challenging 3D object detection dataset KITTI. Our VFMM3D establishes a new state-of-the-art performance. Additionally, experimental results demonstrate the generality of VFMM3D, showcasing its seamless integration into various LiDAR-based 3D object detectors.
4/16/2024

A re-calibration method for object detection with multi-modal alignment bias in autonomous driving
Zhihang Song, Lihui Peng, Jianming Hu, Danya Yao, Yi Zhang
0
0
Multi-modal object detection in autonomous driving has achieved great breakthroughs due to the usage of fusing complementary information from different sensors. The calibration in fusion between sensors such as LiDAR and camera is always supposed to be precise in previous work. However, in reality, calibration matrices are fixed when the vehicles leave the factory, but vibration, bumps, and data lags may cause calibration bias. As the research on the calibration influence on fusion detection performance is relatively few, flexible calibration dependency multi-sensor detection method has always been attractive. In this paper, we conducted experiments on SOTA detection method EPNet++ and proved slight bias on calibration can reduce the performance seriously. We also proposed a re-calibration model based on semantic segmentation which can be combined with a detection algorithm to improve the performance and robustness of multi-modal calibration bias.
5/28/2024