VFMM3D: Releasing the Potential of Image by Vision Foundation Model for Monocular 3D Object Detection

0
Sign in to get full access
Overview
- This paper proposes a new approach called VFMM3D (Vision Foundation Model for Monocular 3D Object Detection) that leverages a vision foundation model to improve the performance of monocular 3D object detection.
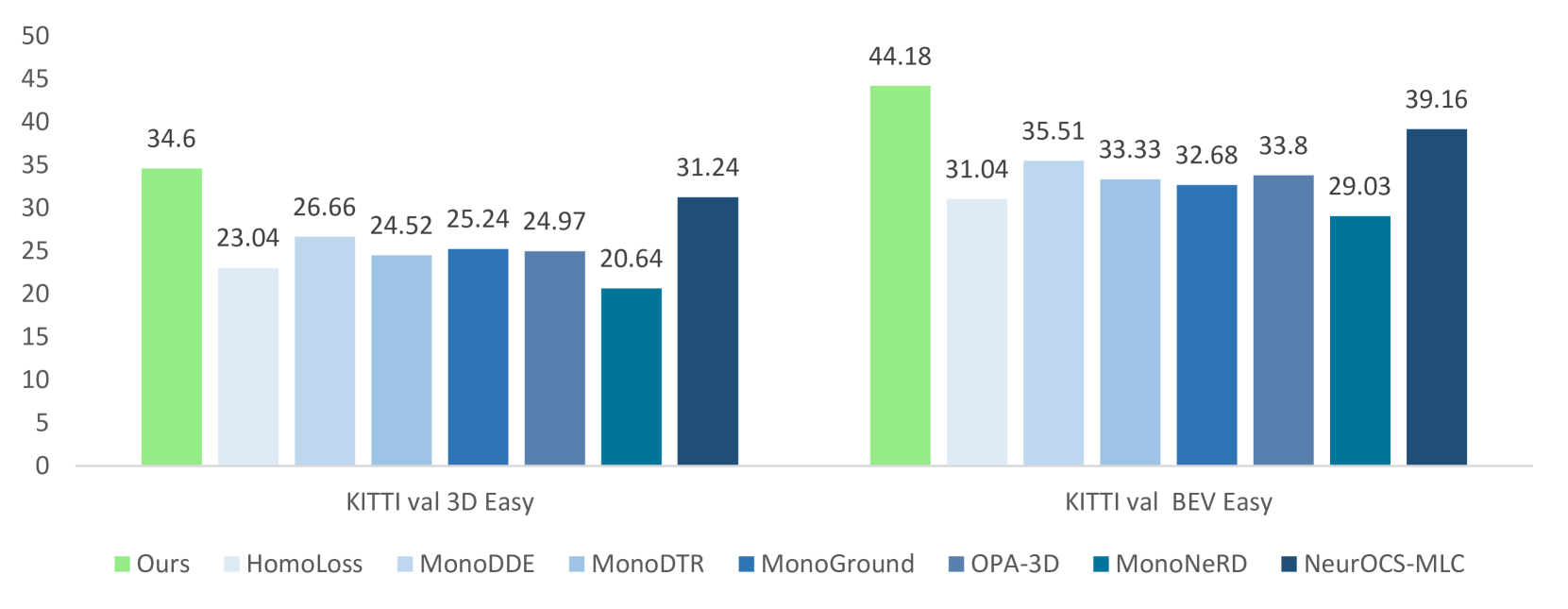
- The authors demonstrate that VFMM3D can outperform state-of-the-art monocular 3D object detectors on standard benchmarks.
- VFMM3D is shown to effectively utilize the rich visual representations learned by vision foundation models, leading to more accurate 3D object detection from a single RGB image.
Plain English Explanation
The paper introduces a new technique called VFMM3D that uses a "vision foundation model" to improve the ability to detect 3D objects from a single camera image, without any additional depth sensors. Vision foundation models are large, powerful AI models that have been trained on vast amounts of visual data and can extract rich, meaningful representations from images.
VFMM3D takes advantage of these powerful visual representations to boost the performance of monocular 3D object detection - that is, the task of identifying the 3D position, orientation, and size of objects in a single camera image. The authors show that by integrating a vision foundation model, VFMM3D can outperform other state-of-the-art monocular 3D object detectors on standard benchmark datasets.
This is an important advance because accurate 3D object detection from a single camera is a longstanding challenge in computer vision, with many real-world applications like self-driving cars, augmented reality, and robotics. VFMM3D demonstrates how leveraging the power of large-scale vision models can help unlock more accurate 3D perception from simple, monocular camera inputs.
Technical Explanation
The key insight behind VFMM3D is that vision foundation models, like CLIP or DINO, can provide useful visual representations to boost the performance of monocular 3D object detection. These models are pre-trained on massive datasets of images and can capture rich, high-level visual features that are transferable to various downstream tasks.
VFMM3D integrates a vision foundation model as a feature extractor, which feeds into a specialized 3D object detection head. This allows the model to leverage the powerful visual representations learned by the foundation model, while still tailoring the final detection output to the 3D task. The authors experiment with different ways of fusing the foundation model features, including concat-based and attention-based fusion modules.
Experiments on standard 3D object detection benchmarks, such as KITTI and nuScenes, demonstrate that VFMM3D outperforms previous state-of-the-art monocular 3D detectors by a significant margin. The authors also provide detailed ablation studies to analyze the contribution of different components of their approach.
Critical Analysis
The paper provides a compelling demonstration of how vision foundation models can be effectively leveraged to improve monocular 3D object detection. However, a few potential limitations and areas for future work are worth noting:
-
The paper focuses on standard benchmark datasets, which may not fully capture the diversity of real-world scenes and object types. Further evaluation on more diverse datasets would help validate the generalization of VFMM3D.
-
The authors do not explore the trade-offs between model complexity, inference speed, and detection accuracy. In practical applications, these factors may be important considerations alongside raw performance.
-
While the paper highlights the benefits of VFMM3D, it does not provide a deep analysis of the types of visual features learned by the foundation model that are particularly valuable for 3D object detection. Further investigation into this could yield insights to guide future model design.
-
The paper does not discuss potential negative societal impacts or ethical considerations of improved 3D object detection, such as privacy concerns or potential for misuse. These are important aspects that should be considered as the technology advances.
Conclusion
The VFMM3D approach proposed in this paper demonstrates the potential of leveraging powerful vision foundation models to significantly improve the performance of monocular 3D object detection. By effectively integrating the rich visual representations learned by these large-scale models, VFMM3D is able to outperform previous state-of-the-art methods on standard benchmarks.
This work highlights the importance of exploring synergies between different AI techniques, such as combining foundation models and task-specific architectures. As 3D perception from single RGB images remains a challenging problem with many real-world applications, advancements like VFMM3D could help unlock more accurate and robust 3D object detection capabilities from simple camera inputs.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
VFMM3D: Releasing the Potential of Image by Vision Foundation Model for Monocular 3D Object Detection
Bonan Ding, Jin Xie, Jing Nie, Jiale Cao, Xuelong Li, Yanwei Pang
Due to its cost-effectiveness and widespread availability, monocular 3D object detection, which relies solely on a single camera during inference, holds significant importance across various applications, including autonomous driving and robotics. Nevertheless, directly predicting the coordinates of objects in 3D space from monocular images poses challenges. Therefore, an effective solution involves transforming monocular images into LiDAR-like representations and employing a LiDAR-based 3D object detector to predict the 3D coordinates of objects. The key step in this method is accurately converting the monocular image into a reliable point cloud form. In this paper, we present VFMM3D, an innovative framework that leverages the capabilities of Vision Foundation Models (VFMs) to accurately transform single-view images into LiDAR point cloud representations. VFMM3D utilizes the Segment Anything Model (SAM) and Depth Anything Model (DAM) to generate high-quality pseudo-LiDAR data enriched with rich foreground information. Specifically, the Depth Anything Model (DAM) is employed to generate dense depth maps. Subsequently, the Segment Anything Model (SAM) is utilized to differentiate foreground and background regions by predicting instance masks. These predicted instance masks and depth maps are then combined and projected into 3D space to generate pseudo-LiDAR points. Finally, any object detectors based on point clouds can be utilized to predict the 3D coordinates of objects. Comprehensive experiments are conducted on two challenging 3D object detection datasets, KITTI and Waymo. Our VFMM3D establishes a new state-of-the-art performance on both datasets. Additionally, experimental results demonstrate the generality of VFMM3D, showcasing its seamless integration into various LiDAR-based 3D object detectors.
Read more8/27/2024
0
MV2DFusion: Leveraging Modality-Specific Object Semantics for Multi-Modal 3D Detection
Zitian Wang, Zehao Huang, Yulu Gao, Naiyan Wang, Si Liu
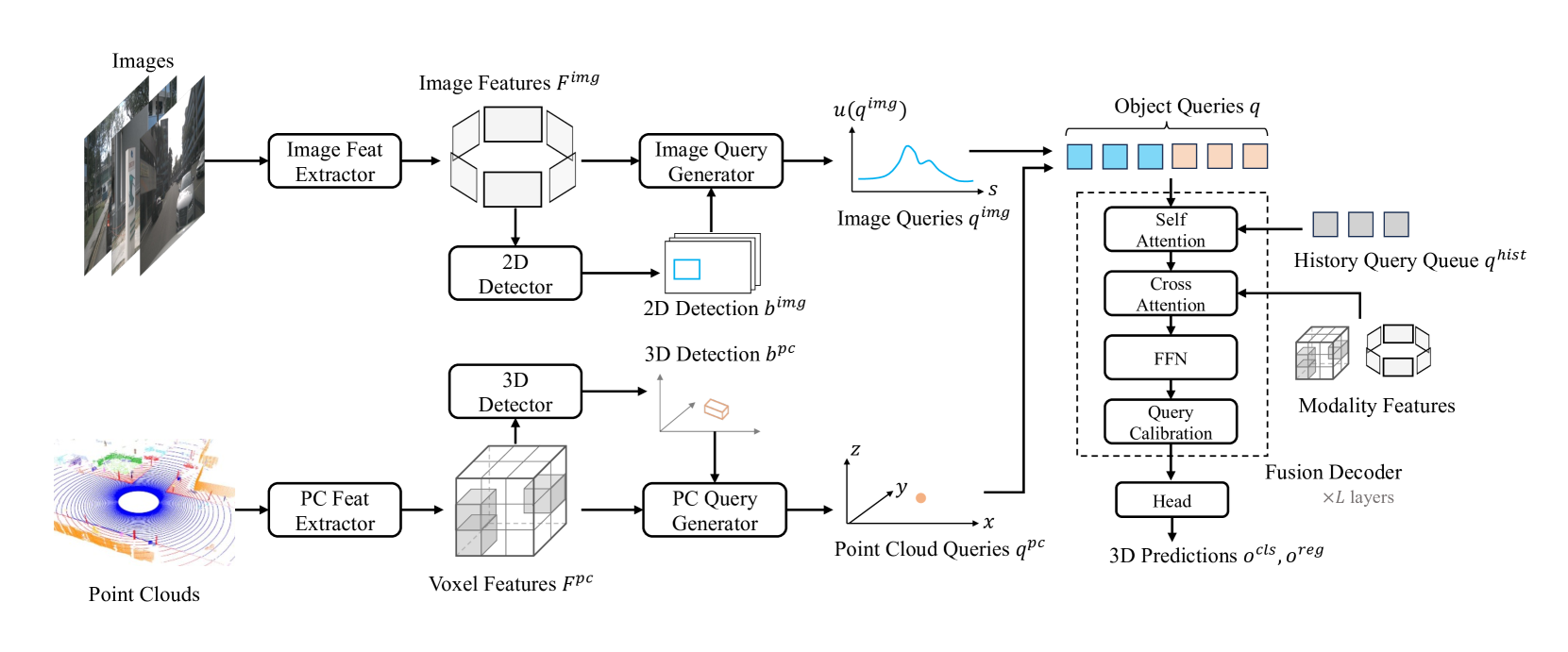
The rise of autonomous vehicles has significantly increased the demand for robust 3D object detection systems. While cameras and LiDAR sensors each offer unique advantages--cameras provide rich texture information and LiDAR offers precise 3D spatial data--relying on a single modality often leads to performance limitations. This paper introduces MV2DFusion, a multi-modal detection framework that integrates the strengths of both worlds through an advanced query-based fusion mechanism. By introducing an image query generator to align with image-specific attributes and a point cloud query generator, MV2DFusion effectively combines modality-specific object semantics without biasing toward one single modality. Then the sparse fusion process can be accomplished based on the valuable object semantics, ensuring efficient and accurate object detection across various scenarios. Our framework's flexibility allows it to integrate with any image and point cloud-based detectors, showcasing its adaptability and potential for future advancements. Extensive evaluations on the nuScenes and Argoverse2 datasets demonstrate that MV2DFusion achieves state-of-the-art performance, particularly excelling in long-range detection scenarios.
Read more8/13/2024

0
vFusedSeg3D: 3rd Place Solution for 2024 Waymo Open Dataset Challenge in Semantic Segmentation
Osama Amjad, Ammad Nadeem
In this technical study, we introduce VFusedSeg3D, an innovative multi-modal fusion system created by the VisionRD team that combines camera and LiDAR data to significantly enhance the accuracy of 3D perception. VFusedSeg3D uses the rich semantic content of the camera pictures and the accurate depth sensing of LiDAR to generate a strong and comprehensive environmental understanding, addressing the constraints inherent in each modality. Through a carefully thought-out network architecture that aligns and merges these information at different stages, our novel feature fusion technique combines geometric features from LiDAR point clouds with semantic features from camera images. With the use of multi-modality techniques, performance has significantly improved, yielding a state-of-the-art mIoU of 72.46% on the validation set as opposed to the prior 70.51%.VFusedSeg3D sets a new benchmark in 3D segmentation accuracy. making it an ideal solution for applications requiring precise environmental perception.
Read more8/29/2024
0
Zero-shot detection of buildings in mobile LiDAR using Language Vision Model
June Moh Goo, Zichao Zeng, Jan Boehm
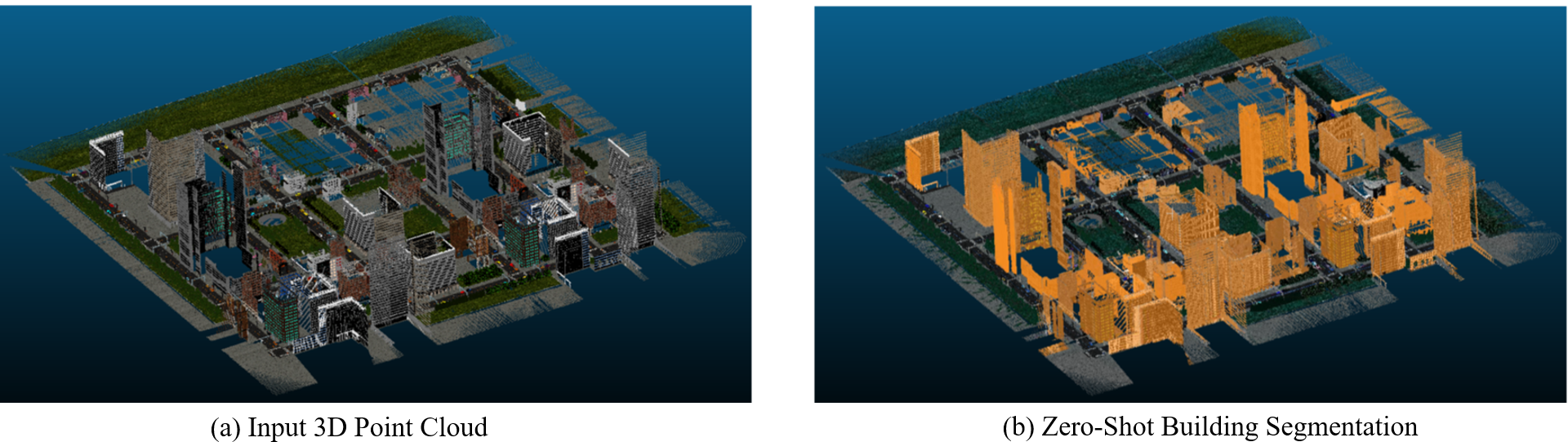
Recent advances have demonstrated that Language Vision Models (LVMs) surpass the existing State-of-the-Art (SOTA) in two-dimensional (2D) computer vision tasks, motivating attempts to apply LVMs to three-dimensional (3D) data. While LVMs are efficient and effective in addressing various downstream 2D vision tasks without training, they face significant challenges when it comes to point clouds, a representative format for representing 3D data. It is more difficult to extract features from 3D data and there are challenges due to large data sizes and the cost of the collection and labelling, resulting in a notably limited availability of datasets. Moreover, constructing LVMs for point clouds is even more challenging due to the requirements for large amounts of data and training time. To address these issues, our research aims to 1) apply the Grounded SAM through Spherical Projection to transfer 3D to 2D, and 2) experiment with synthetic data to evaluate its effectiveness in bridging the gap between synthetic and real-world data domains. Our approach exhibited high performance with an accuracy of 0.96, an IoU of 0.85, precision of 0.92, recall of 0.91, and an F1 score of 0.92, confirming its potential. However, challenges such as occlusion problems and pixel-level overlaps of multi-label points during spherical image generation remain to be addressed in future studies.
Read more4/16/2024