RoboKoop: Efficient Control Conditioned Representations from Visual Input in Robotics using Koopman Operator

0

Sign in to get full access
Overview
- This research paper, titled "RoboKoop: Efficient Control Conditioned Representations from Visual Input in Robotics using Koopman Operator", proposes a new method for learning control-conditioned representations from visual inputs in robotics.
- The key idea is to use the Koopman operator, a mathematical framework for analyzing nonlinear dynamical systems, to learn efficient representations that capture the relationship between visual inputs and control signals.
- The authors demonstrate the effectiveness of their approach, called RoboKoop, on various robotics tasks and show that it outperforms existing methods in terms of sample efficiency and control performance.
Plain English Explanation
The paper focuses on a fundamental challenge in robotics: how to learn useful representations from the visual inputs a robot receives, and how to connect those representations to the control signals the robot needs to generate in order to perform tasks.
The researchers' key insight is to use something called the Koopman operator. The Koopman operator is a mathematical tool that can be used to analyze complex, nonlinear dynamical systems - like the way a robot's state changes over time in response to its controls. By learning a Koopman operator model from data, the researchers are able to extract control-conditioned representations - representations of the visual input that are specifically tailored to the control problem the robot is trying to solve.
These control-conditioned representations have several advantages. They are efficient, meaning the robot can learn complex behaviors from relatively little training data. They are also interpretable, since the Koopman operator framework provides a principled way to understand how the representations relate to the underlying dynamics. And they generalize well, allowing the robot to apply what it has learned to new situations.
The researchers call their overall approach RoboKoop, and they demonstrate its effectiveness on a variety of robotics tasks. Compared to existing methods, RoboKoop shows improved sample efficiency and better control performance, suggesting it is a promising technique for enabling robots to learn complex skills from visual inputs.
Technical Explanation
The core of the RoboKoop approach is the use of the Koopman operator to learn control-conditioned representations from visual inputs. The Koopman operator is a linear operator that can represent the evolution of nonlinear dynamical systems in an infinite-dimensional Hilbert space.
The key steps of the RoboKoop method are:
- Koopman Embedding: The researchers learn a Koopman embedding function that maps the robot's visual observations into a latent space where the dynamics are approximately linear.
- Control Conditioning: They then condition the Koopman embedding on the robot's control inputs, learning a representation that captures the relationship between visual inputs and control signals.
- Dynamics Modeling: Using the control-conditioned Koopman embedding, the researchers learn a dynamics model that predicts the evolution of the robot's state over time.
The researchers evaluate RoboKoop on a range of robotics tasks, including simulated manipulation, navigation, and locomotion. They show that RoboKoop outperforms baseline methods in terms of sample efficiency and control performance.
Critical Analysis
The researchers acknowledge several limitations and avenues for future work:
- Scalability: While the Koopman operator framework is powerful, scaling it to high-dimensional visual inputs and complex control spaces remains a challenge.
- Robustness: The paper does not extensively evaluate the robustness of RoboKoop to disturbances, noisy observations, or other real-world factors.
- Interpretability: While the Koopman operator provides some interpretability, the researchers note that further work is needed to make the learned representations more transparent and intuitive.
Additionally, one could raise the following points for further discussion:
- Generalization: The paper focuses on evaluating RoboKoop on specific robotics tasks. It would be valuable to understand how well the learned representations generalize to novel tasks and environments.
- Real-world Deployment: The experiments are conducted in simulation. Validating the approach on physical robot platforms and real-world scenarios would be an important next step.
- Computational Complexity: The Koopman operator-based modeling and optimization may introduce additional computational overhead compared to some baseline methods. The trade-offs in terms of runtime and memory requirements should be considered.
Overall, the RoboKoop approach represents an interesting and promising direction for learning control-conditioned representations in robotics. The use of the Koopman operator framework is a novel contribution, and the demonstrated improvements in sample efficiency and control performance are compelling. Further research addressing the identified limitations could lead to even more robust and practical solutions for robot learning from visual inputs.
Conclusion
The RoboKoop paper presents a novel method for learning efficient, control-conditioned representations from visual inputs in robotics. By leveraging the Koopman operator framework, the researchers are able to extract representations that capture the relationship between visual observations and control signals, leading to improved sample efficiency and control performance compared to existing techniques.
While the approach has some limitations that warrant further investigation, the core ideas behind RoboKoop – using the Koopman operator to model nonlinear robot dynamics and learning control-conditioned representations – represent an exciting advancement in the field of robot learning. As robots continue to take on increasingly complex tasks in the real world, methods like RoboKoop that can efficiently learn from rich sensory inputs will be essential for enabling them to perform at a high level.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RoboKoop: Efficient Control Conditioned Representations from Visual Input in Robotics using Koopman Operator
Hemant Kumawat, Biswadeep Chakraborty, Saibal Mukhopadhyay
Developing agents that can perform complex control tasks from high-dimensional observations is a core ability of autonomous agents that requires underlying robust task control policies and adapting the underlying visual representations to the task. Most existing policies need a lot of training samples and treat this problem from the lens of two-stage learning with a controller learned on top of pre-trained vision models. We approach this problem from the lens of Koopman theory and learn visual representations from robotic agents conditioned on specific downstream tasks in the context of learning stabilizing control for the agent. We introduce a Contrastive Spectral Koopman Embedding network that allows us to learn efficient linearized visual representations from the agent's visual data in a high dimensional latent space and utilizes reinforcement learning to perform off-policy control on top of the extracted representations with a linear controller. Our method enhances stability and control in gradient dynamics over time, significantly outperforming existing approaches by improving efficiency and accuracy in learning task policies over extended horizons.
Read more9/6/2024
0
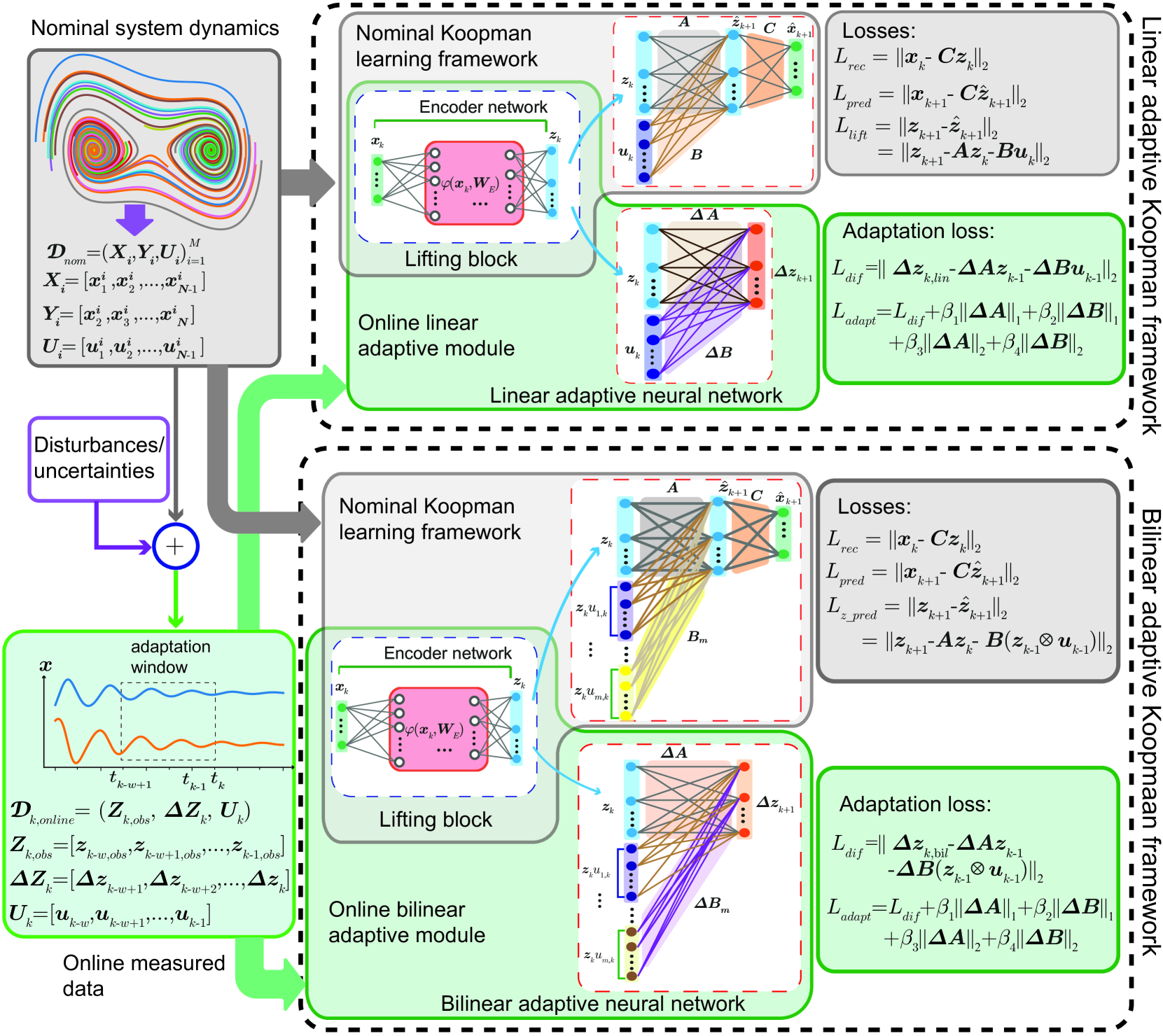
Adaptive Koopman Embedding for Robust Control of Complex Dynamical Systems
Rajpal Singh, Chandan Kumar Sah, Jishnu Keshavan
The discovery of linear embedding is the key to the synthesis of linear control techniques for nonlinear systems. In recent years, while Koopman operator theory has become a prominent approach for learning these linear embeddings through data-driven methods, these algorithms often exhibit limitations in generalizability beyond the distribution captured by training data and are not robust to changes in the nominal system dynamics induced by intrinsic or environmental factors. To overcome these limitations, this study presents an adaptive Koopman architecture capable of responding to the changes in system dynamics online. The proposed framework initially employs an autoencoder-based neural network that utilizes input-output information from the nominal system to learn the corresponding Koopman embedding offline. Subsequently, we augment this nominal Koopman architecture with a feed-forward neural network that learns to modify the nominal dynamics in response to any deviation between the predicted and observed lifted states, leading to improved generalization and robustness to a wide range of uncertainties and disturbances compared to contemporary methods. Extensive tracking control simulations, which are undertaken by integrating the proposed scheme within a Model Predictive Control framework, are used to highlight its robustness against measurement noise, disturbances, and parametric variations in system dynamics.
Read more5/21/2024

0
Koopman Operators in Robot Learning
Lu Shi, Masih Haseli, Giorgos Mamakoukas, Daniel Bruder, Ian Abraham, Todd Murphey, Jorge Cortes, Konstantinos Karydis
Koopman operator theory offers a rigorous treatment of dynamics and has been emerging as a powerful modeling and learning-based control method enabling significant advancements across various domains of robotics. Due to its ability to represent nonlinear dynamics as a linear operator, Koopman theory offers a fresh lens through which to understand and tackle the modeling and control of complex robotic systems. Moreover, it enables incremental updates and is computationally inexpensive making it particularly appealing for real-time applications and online active learning. This review comprehensively presents recent research results on advancing Koopman operator theory across diverse domains of robotics, encompassing aerial, legged, wheeled, underwater, soft, and manipulator robotics. Furthermore, it offers practical tutorials to help new users get started as well as a treatise of more advanced topics leading to an outlook on future directions and open research questions. Taken together, these provide insights into the potential evolution of Koopman theory as applied to the field of robotics.
Read more8/9/2024
🔮
0
Nonparametric Control-Koopman Operator Learning: Flexible and Scalable Models for Prediction and Control
Petar Bevanda, Bas Driessen, Lucian Cristian Iacob, Roland Toth, Stefan Sosnowski, Sandra Hirche
Linearity of Koopman operators and simplicity of their estimators coupled with model-reduction capabilities has lead to their great popularity in applications for learning dynamical systems. While nonparametric Koopman operator learning in infinite-dimensional reproducing kernel Hilbert spaces is well understood for autonomous systems, its control system analogues are largely unexplored. Addressing systems with control inputs in a principled manner is crucial for fully data-driven learning of controllers, especially since existing approaches commonly resort to representational heuristics or parametric models of limited expressiveness and scalability. We address the aforementioned challenge by proposing a universal framework via control-affine reproducing kernels that enables direct estimation of a single operator even for control systems. The proposed approach, called control-Koopman operator regression (cKOR), is thus completely analogous to Koopman operator regression of the autonomous case. First in the literature, we present a nonparametric framework for learning Koopman operator representations of nonlinear control-affine systems that does not suffer from the curse of control input dimensionality. This allows for reformulating the infinite-dimensional learning problem in a finite-dimensional space based solely on data without apriori loss of precision due to a restriction to a finite span of functions or inputs as in other approaches. For enabling applications to large-scale control systems, we also enhance the scalability of control-Koopman operator estimators by leveraging random projections (sketching). The efficacy of our novel cKOR approach is demonstrated on both forecasting and control tasks.
Read more5/14/2024