Robust Dynamic Control Barrier Function Based Trajectory Planning for Mobile Manipulator
2406.15806
0
0

Abstract
High-dimensional robot dynamic trajectory planning poses many challenges for traditional planning algorithms. Existing planning methods suffer from issues such as long computation times, limited capacity to address intricate obstacle models, and lack of consideration for external disturbances and measurement inaccuracies in these high-dimensional systems. To tackle these challenges, this paper proposes a novel trajectory planning approach that combines Dynamic Control Barrier Function (DCBF) with a disturbance observer to create a Robust Dynamic Control Barrier Function (RDCBF) planner. This approach successfully plans trajectories in environments with complex dynamic obstacles while accounting for external disturbances and measurement uncertainties, ensuring system safety and enabling precise obstacle avoidance. Experimental results on a mobile manipulator demonstrate outstanding performance of the proposed approach.
Create account to get full access
Overview
- This research paper proposes a robust dynamic control barrier function-based trajectory planning approach for mobile manipulators operating in dynamic environments.
- The method aims to ensure safe and collision-free motion while considering the dynamic constraints of the robot and the environment.
- Key features include the use of control barrier functions to enforce safety constraints and a robust optimization-based trajectory planning framework to handle uncertainties.
Plain English Explanation
The paper presents a new way to plan the motion of a mobile robot with a manipulator arm, like a robot used for tasks such as picking up and moving objects. The goal is to ensure the robot can move safely and avoid collisions, even in environments that are constantly changing.
The researchers use a mathematical tool called a "control barrier function" to define the safety constraints the robot must follow. This allows the robot to automatically adjust its trajectory to stay within these safety bounds, without colliding with obstacles. The researchers also incorporate a robust optimization-based approach to handle uncertainties in the robot's sensors and the environment, making the system more reliable.
Overall, this method aims to enable mobile manipulators to navigate dynamic environments safely and efficiently, which could be useful for applications like [link to https://aimodels.fyi/papers/arxiv/robot-safe-planning-dynamic-environments-based-model] warehouse automation, [link to https://aimodels.fyi/papers/arxiv/sensor-based-distributionally-robust-control-safe-robot] search and rescue operations, or [link to https://aimodels.fyi/papers/arxiv/flexible-active-safety-motion-control-robotic-obstacle] autonomous driving.
Technical Explanation
The paper proposes a robust dynamic control barrier function (RDCBF)-based trajectory planning approach for mobile manipulators operating in uncertain, dynamic environments. The key elements of the method include:
-
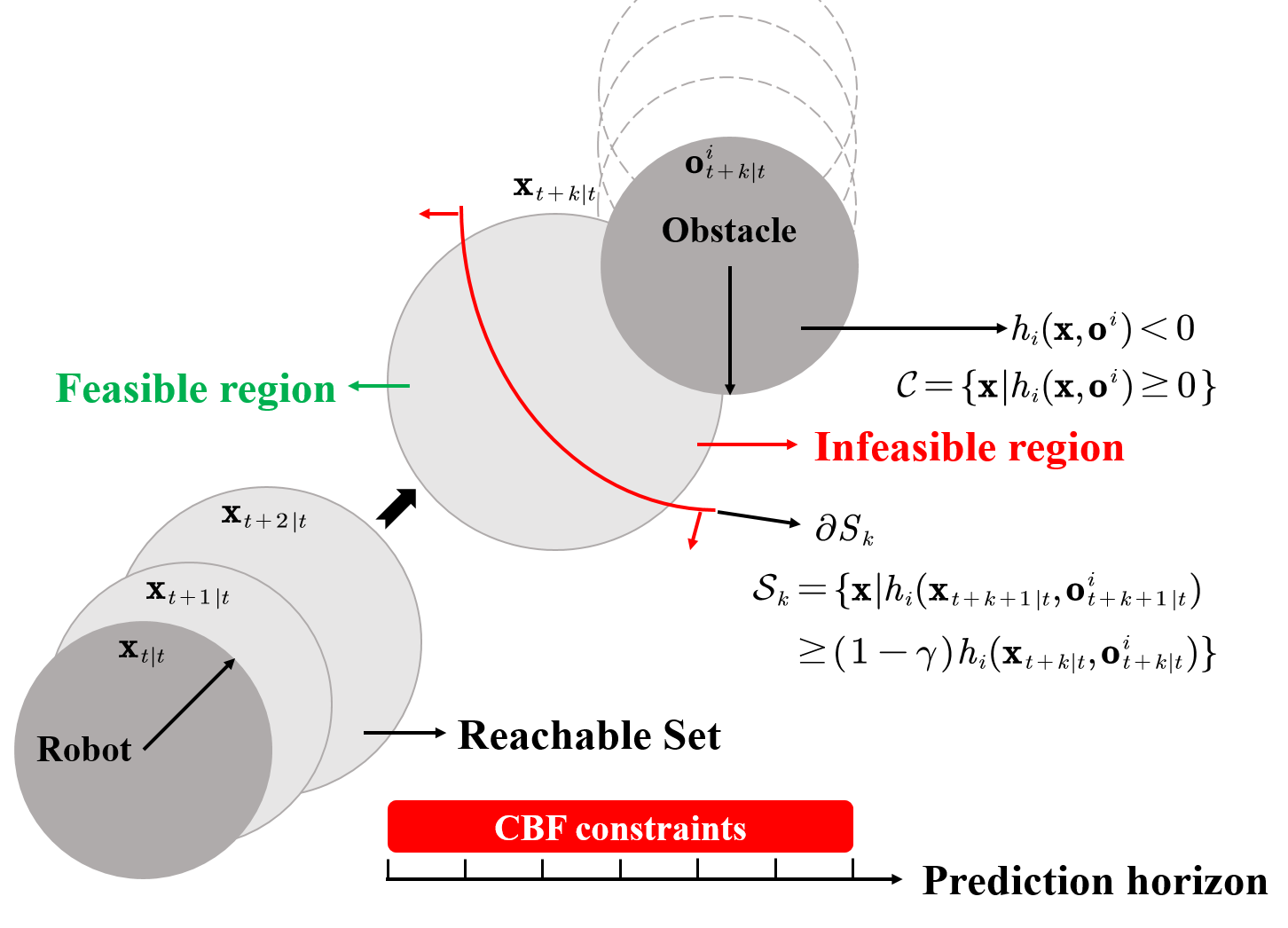
Control Barrier Functions (CBFs): The researchers use CBFs to encode safety constraints, such as collision avoidance, into the robot's motion planning problem. CBFs ensure that the robot's trajectory satisfies these constraints throughout its execution.
-
Robust Optimization: To handle uncertainties in the robot's state, the environment, and the dynamic obstacles, the researchers formulate the trajectory planning problem as a robust optimization problem. This allows the system to generate trajectories that are resilient to these uncertainties.
-
Trajectory Optimization: The researchers use an optimization-based approach to generate the robot's trajectory, which simultaneously satisfies the safety constraints encoded by the CBFs and the dynamic constraints of the robot and environment.
The researchers evaluate their method through simulations and experiments, demonstrating its ability to generate safe, collision-free trajectories for mobile manipulators in dynamic environments, even in the presence of sensor noise and modeling errors. The results show the method's effectiveness in [link to https://aimodels.fyi/papers/arxiv/cobl-diffusion-diffusion-based-conditional-robot-planning] planning trajectories that satisfy safety constraints while also optimizing for other performance criteria, such as [link to https://aimodels.fyi/papers/arxiv/linear-mpc-control-barrier-functions-differential-drive] energy efficiency.
Critical Analysis
The paper presents a comprehensive and well-designed approach to the problem of safe trajectory planning for mobile manipulators in dynamic environments. The use of control barrier functions to encode safety constraints is a powerful and principled technique, and the incorporation of robust optimization to handle uncertainties is a valuable contribution.
However, the paper does not address some potential limitations of the approach. For example, the computational complexity of the optimization-based trajectory planning may limit its real-time applicability, especially for systems with many degrees of freedom or complex dynamic models. Additionally, the paper does not discuss how the method would perform in scenarios with highly dynamic, unpredictable obstacles or in the presence of multiple moving agents.
Further research could explore ways to improve the computational efficiency of the approach, perhaps through the use of more efficient optimization algorithms or simplified robot models. Investigating the method's performance in more challenging and realistic dynamic environments would also be a valuable area of future work.
Conclusion
This research paper presents a novel approach to safe trajectory planning for mobile manipulators operating in dynamic environments. By leveraging control barrier functions and robust optimization, the method can generate trajectories that satisfy safety constraints while considering the dynamic uncertainties of the robot and its surroundings.
The proposed RDCBF-based planning framework has the potential to enable mobile manipulators to navigate complex, changing environments more safely and reliably, which could have important implications for a wide range of applications, such as [link to https://aimodels.fyi/papers/arxiv/robot-safe-planning-dynamic-environments-based-model] warehouse automation, [link to https://aimodels.fyi/papers/arxiv/sensor-based-distributionally-robust-control-safe-robot] search and rescue operations, and [link to https://aimodels.fyi/papers/arxiv/flexible-active-safety-motion-control-robotic-obstacle] autonomous driving. Further research to address the method's computational complexity and expand its capabilities in more challenging dynamic scenarios could help realize the full potential of this approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
0
0
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
4/10/2024

Sensor-Based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments
Kehan Long, Yinzhuang Yi, Zhirui Dai, Sylvia Herbert, Jorge Cort'es, Nikolay Atanasov
0
0
We introduce a novel method for safe mobile robot navigation in dynamic, unknown environments, utilizing onboard sensing to impose safety constraints without the need for accurate map reconstruction. Traditional methods typically rely on detailed map information to synthesize safe stabilizing controls for mobile robots, which can be computationally demanding and less effective, particularly in dynamic operational conditions. By leveraging recent advances in distributionally robust optimization, we develop a distributionally robust control barrier function (DR-CBF) constraint that directly processes range sensor data to impose safety constraints. Coupling this with a control Lyapunov function (CLF) for path tracking, we demonstrate that our CLF-DR-CBF control synthesis method achieves safe, efficient, and robust navigation in uncertain dynamic environments. We demonstrate the effectiveness of our approach in simulated and real autonomous robot navigation experiments, marking a substantial advancement in real-time safety guarantees for mobile robots.
5/29/2024
🛸
Flexible Active Safety Motion Control for Robotic Obstacle Avoidance: A CBF-Guided MPC Approach
Jinhao Liu, Jun Yang, Jianliang Mao, Tianqi Zhu, Qihang Xie, Yimeng Li, Xiangyu Wang, Shihua Li
0
0
A flexible active safety motion (FASM) control approach is proposed for the avoidance of dynamic obstacles and the reference tracking in robot manipulators. The distinctive feature of the proposed method lies in its utilization of control barrier functions (CBF) to design flexible CBF-guided safety criteria (CBFSC) with dynamically optimized decay rates, thereby offering flexibility and active safety for robot manipulators in dynamic environments. First, discrete-time CBFs are employed to formulate the novel flexible CBFSC with dynamic decay rates for robot manipulators. Following that, the model predictive control (MPC) philosophy is applied, integrating flexible CBFSC as safety constraints into the receding-horizon optimization problem. Significantly, the decay rates of the designed CBFSC are incorporated as decision variables in the optimization problem, facilitating the dynamic enhancement of flexibility during the obstacle avoidance process. In particular, a novel cost function that integrates a penalty term is designed to dynamically adjust the safety margins of the CBFSC. Finally, experiments are conducted in various scenarios using a Universal Robots 5 (UR5) manipulator to validate the effectiveness of the proposed approach.
5/22/2024

CoBL-Diffusion: Diffusion-Based Conditional Robot Planning in Dynamic Environments Using Control Barrier and Lyapunov Functions
Kazuki Mizuta, Karen Leung
0
0
Equipping autonomous robots with the ability to navigate safely and efficiently around humans is a crucial step toward achieving trusted robot autonomy. However, generating robot plans while ensuring safety in dynamic multi-agent environments remains a key challenge. Building upon recent work on leveraging deep generative models for robot planning in static environments, this paper proposes CoBL-Diffusion, a novel diffusion-based safe robot planner for dynamic environments. CoBL-Diffusion uses Control Barrier and Lyapunov functions to guide the denoising process of a diffusion model, iteratively refining the robot control sequence to satisfy the safety and stability constraints. We demonstrate the effectiveness of the proposed model using two settings: a synthetic single-agent environment and a real-world pedestrian dataset. Our results show that CoBL-Diffusion generates smooth trajectories that enable the robot to reach goal locations while maintaining a low collision rate with dynamic obstacles.
6/11/2024