Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
2404.05952
0
0
Abstract
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Create account to get full access
Overview
- This research paper proposes a robot safe planning approach for dynamic environments using model predictive control (MPC) and control barrier functions (CBFs).
- The goal is to enable autonomous robots to navigate safely in unpredictable, changing environments while avoiding collisions with moving obstacles.
- The approach combines MPC to optimize the robot's trajectory and CBFs to ensure the robot's actions satisfy safety constraints.
Plain English Explanation
The researchers have developed a system to help robots safely navigate through dynamic, changing environments. Imagine a self-driving car trying to get from point A to point B without hitting any other cars, pedestrians, or obstacles along the way. This can be a tricky challenge, especially when the other objects are also moving around.
The key ideas behind this research are:
-
Model Predictive Control (MPC): This is a technique that allows the robot to "look ahead" and plan an optimal path to its destination. It does this by creating a model of the environment and simulating different possible actions the robot could take to see which one is best.
-
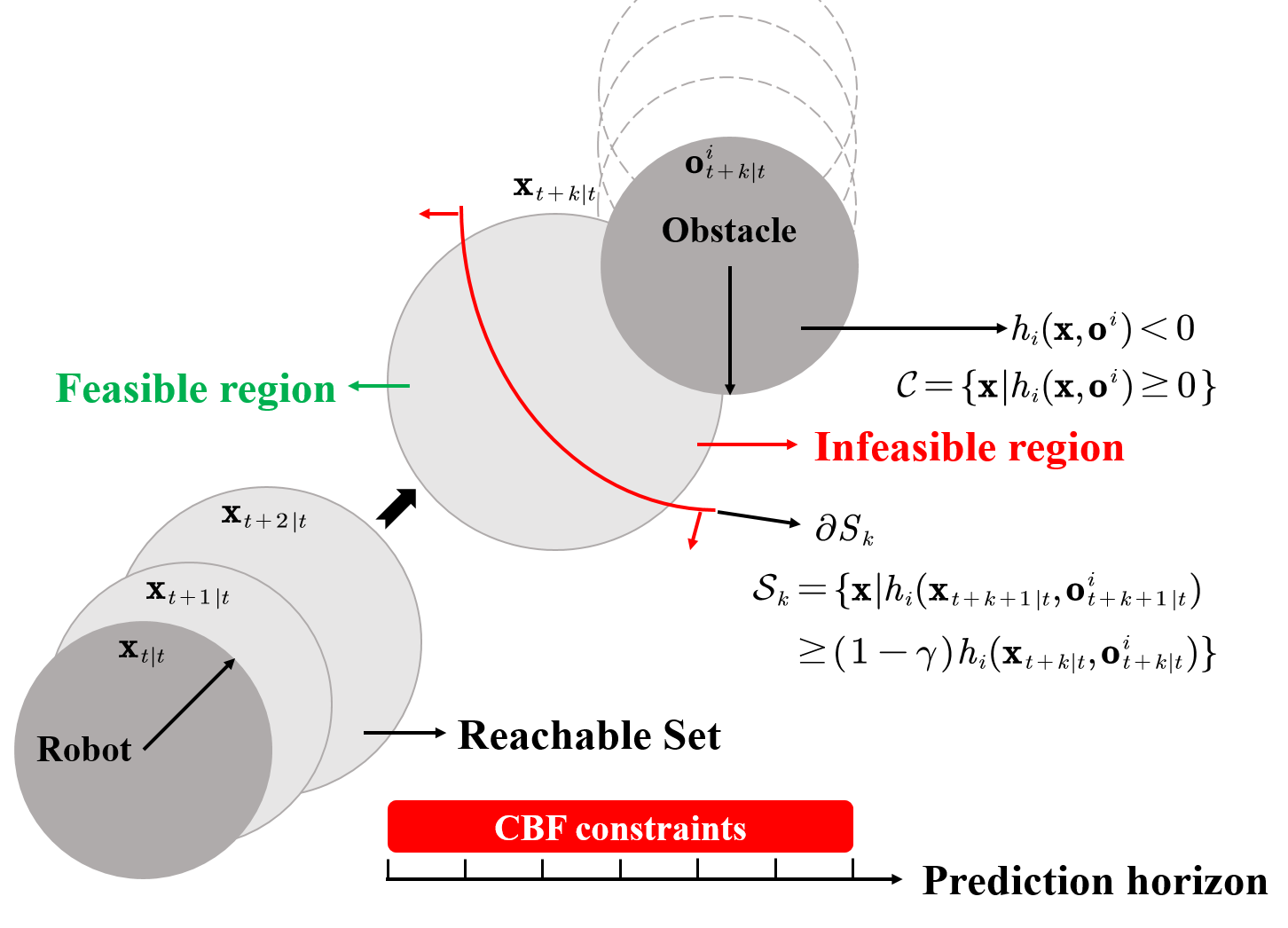
Control Barrier Functions (CBFs): These are mathematical functions that define the "safe" regions the robot is allowed to be in. They act as virtual barriers, preventing the robot from straying into dangerous areas where collisions could occur.
By combining MPC and CBFs, the researchers have created a system that can plan an efficient path for the robot while also ensuring it stays within the "safe" regions at all times. This allows the robot to navigate through dynamic, unpredictable environments without colliding with any moving objects.
The potential benefits of this research include:
- Enabling more reliable and safer autonomous robots for applications like self-driving cars, drones, and industrial robots.
- Improving the ability of robots to operate in complex, real-world environments where obstacles and conditions are constantly changing.
- Providing a framework for developing robust, adaptive control systems that can handle uncertainty and sudden changes.
Technical Explanation
The paper presents a robot safe planning approach for dynamic environments based on model predictive control (MPC) using control barrier functions (CBFs).
The key components of the proposed approach are:
-
MPC: The robot's trajectory is optimized using MPC, which involves simulating the robot's dynamics over a finite prediction horizon and selecting the control inputs that minimize a cost function while satisfying constraints.
-
CBFs: CBFs are used to define safety constraints that must be satisfied during the MPC optimization. These constraints ensure the robot's actions keep it within a "safe" region, preventing collisions with moving obstacles.
-
Integration of MPC and CBFs: The MPC optimization problem is formulated to include the CBF constraints, ensuring the planned trajectory satisfies the safety requirements.
The researchers evaluate their approach through simulations of a mobile robot navigating a dynamic environment with moving obstacles. The results demonstrate the ability of the combined MPC-CBF framework to generate safe, collision-free trajectories even in the presence of unpredictable obstacle motion.
Critical Analysis
The paper presents a compelling approach for enabling safe robot navigation in dynamic environments. The integration of MPC and CBFs provides a principled way to balance optimality and safety, which is a crucial requirement for real-world autonomous systems.
One potential limitation of the approach is the reliance on an accurate model of the robot's dynamics and the environment. In practice, there may be uncertainties or unmodeled effects that could compromise the safety guarantees provided by the CBFs. Further research may be needed to address this challenge and make the approach more robust to model errors.
Additionally, the paper focuses on a single robot scenario. Extending the approach to multi-robot systems with coordination and collision avoidance between the robots could be an interesting area for future work.
Overall, this research represents a valuable contribution to the field of safe and reliable autonomous navigation, demonstrating the potential of combining model predictive control and control barrier functions to address the challenges of robot safety in dynamic environments.
Conclusion
This research paper presents a novel approach for robot safe planning in dynamic environments using model predictive control (MPC) and control barrier functions (CBFs). By integrating these two techniques, the researchers have developed a system that can generate safe, collision-free trajectories for autonomous robots navigating through unpredictable, changing environments.
The key strengths of this approach are its ability to optimize the robot's path while ensuring safety constraints are satisfied, as well as its potential for enabling more reliable and robust autonomous systems. While the approach has some limitations, such as the reliance on accurate models, it represents a significant step forward in the quest for safe and adaptive robot navigation.
Overall, this work contributes valuable insights and techniques that can help advance the field of autonomous robotics, with potential applications in self-driving cars, drones, and industrial automation, among others.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛸
Flexible Active Safety Motion Control for Robotic Obstacle Avoidance: A CBF-Guided MPC Approach
Jinhao Liu, Jun Yang, Jianliang Mao, Tianqi Zhu, Qihang Xie, Yimeng Li, Xiangyu Wang, Shihua Li
0
0
A flexible active safety motion (FASM) control approach is proposed for the avoidance of dynamic obstacles and the reference tracking in robot manipulators. The distinctive feature of the proposed method lies in its utilization of control barrier functions (CBF) to design flexible CBF-guided safety criteria (CBFSC) with dynamically optimized decay rates, thereby offering flexibility and active safety for robot manipulators in dynamic environments. First, discrete-time CBFs are employed to formulate the novel flexible CBFSC with dynamic decay rates for robot manipulators. Following that, the model predictive control (MPC) philosophy is applied, integrating flexible CBFSC as safety constraints into the receding-horizon optimization problem. Significantly, the decay rates of the designed CBFSC are incorporated as decision variables in the optimization problem, facilitating the dynamic enhancement of flexibility during the obstacle avoidance process. In particular, a novel cost function that integrates a penalty term is designed to dynamically adjust the safety margins of the CBFSC. Finally, experiments are conducted in various scenarios using a Universal Robots 5 (UR5) manipulator to validate the effectiveness of the proposed approach.
5/22/2024

Robust Dynamic Control Barrier Function Based Trajectory Planning for Mobile Manipulator
Lihao Xu, Xiaogang Xiong, Bai Yang, Yunjiang Lou
0
0
High-dimensional robot dynamic trajectory planning poses many challenges for traditional planning algorithms. Existing planning methods suffer from issues such as long computation times, limited capacity to address intricate obstacle models, and lack of consideration for external disturbances and measurement inaccuracies in these high-dimensional systems. To tackle these challenges, this paper proposes a novel trajectory planning approach that combines Dynamic Control Barrier Function (DCBF) with a disturbance observer to create a Robust Dynamic Control Barrier Function (RDCBF) planner. This approach successfully plans trajectories in environments with complex dynamic obstacles while accounting for external disturbances and measurement uncertainties, ensuring system safety and enabling precise obstacle avoidance. Experimental results on a mobile manipulator demonstrate outstanding performance of the proposed approach.
6/26/2024
👁️
A Linear MPC with Control Barrier Functions for Differential Drive Robots
Ali Mohamed Ali, Chao Shen, Hashim A. Hashim
0
0
The need for fully autonomous mobile robots has surged over the past decade, with the imperative of ensuring safe navigation in a dynamic setting emerging as a primary challenge impeding advancements in this domain. In this paper, a Safety Critical Model Predictive Control based on Dynamic Feedback Linearization tailored to the application of differential drive robots with two wheels is proposed to generate control signals that result in obstacle-free paths. A barrier function introduces a safety constraint to the optimization problem of the Model Predictive Control (MPC) to prevent collisions. Due to the intrinsic nonlinearities of the differential drive robots, computational complexity while implementing a Nonlinear Model Predictive Control (NMPC) arises. To facilitate the real-time implementation of the optimization problem and to accommodate the underactuated nature of the robot, a combination of Linear Model Predictive Control (LMPC) and Dynamic Feedback Linearization (DFL) is proposed. The MPC problem is formulated on a linear equivalent model of the differential drive robot rendered by the DFL controller. The analysis of the closed-loop stability and recursive feasibility of the proposed control design is discussed. Numerical experiments illustrate the robustness and effectiveness of the proposed control synthesis in avoiding obstacles with respect to the benchmark of using Euclidean distance constraints. Keywords: Model Predictive Control, MPC, Autonomous Ground Vehicles, Nonlinearity, Dynamic Feedback Linearization, Optimal Control, Differential Robots.
4/17/2024

Safe Control using Occupancy Grid Map-based Control Barrier Function (OGM-CBF)
Golnaz Raja, Teemu Mokkonen, Reza Ghabcheloo
0
0
Safe navigation in unknown environments stands as a significant challenge in the field of robotics. Control Barrier Function (CBF) is a strong mathematical tool to guarantee safety requirements. However, a common assumption in many works is that the CBF is already known and obstacles have predefined shapes. In this letter, we present a novel method called Occupancy Grid Map-based Control Barrier Function (OGM-CBF), which defines Control Barrier Function based on Occupancy Grid Maps. This enables generalization to unknown environments while generating online local or global maps of the environment using onboard perception sensors such as LiDAR or camera. With this method, the system guarantees safety via a single, continuously differentiable CBF per time step, which can be represented as one constraint in the CBF-QP optimization formulation while having an arbitrary number of obstacles with unknown shapes in the environment. This enables practical real-time implementation of CBF in both unknown and known environments. The efficacy of OGM-CBF is demonstrated in the safe control of an autonomous car in the CARLA simulator and a real-world industrial mobile robot.
5/22/2024