Robust High-Speed State Estimation for Off-road Navigation using Radar Velocity Factors

0

Sign in to get full access
Overview
- The paper presents a robust high-speed state estimation approach for off-road navigation using radar velocity factors.
- It addresses the challenge of accurately estimating vehicle state, such as position and velocity, in dynamic off-road environments where GPS signals may be unreliable.
- The proposed method leverages radar-based velocity measurements to enhance the accuracy and robustness of the state estimation process.
Plain English Explanation
The paper describes a new way to help self-driving cars and other autonomous vehicles navigate through rough, off-road terrain more accurately. One of the key challenges in these environments is accurately tracking the vehicle's position and speed, especially when GPS signals may be weak or unreliable.
The researchers developed a method that uses radar sensors to measure the vehicle's velocity more precisely. Radar is a technology that uses radio waves to detect and track objects, and it can provide reliable velocity information even in challenging off-road conditions.
By incorporating these radar-based velocity measurements into the vehicle's state estimation process, the researchers were able to improve the accuracy and robustness of the overall system. This means the vehicle can better track its position and speed, even when GPS is not available or reliable.
The researchers tested their approach in simulations and real-world experiments, and found that it outperformed other state-of-the-art methods, especially at high speeds and in dynamic off-road environments. This could be a key advancement for improving the performance and safety of autonomous vehicles navigating challenging terrain.
Technical Explanation
The paper introduces a novel robust high-speed state estimation approach for off-road navigation that leverages radar velocity factors. The researchers identified that in dynamic off-road environments, traditional state estimation methods that rely primarily on GPS can suffer from inaccuracies due to signal degradation or loss.
To address this, the proposed approach integrates radar-based velocity measurements into the state estimation process. Radar is used to provide highly accurate and reliable velocity information, which is then fused with other sensor data (e.g., inertial measurements) using an extended Kalman filter to estimate the vehicle's position, orientation, and velocity.
The key innovation is the incorporation of radar velocity factors, which the researchers found can significantly improve the overall state estimation accuracy, especially at high speeds and in dynamic off-road conditions where GPS signals may be unreliable or unavailable.
The paper presents a detailed experimental evaluation of the proposed approach, including both simulation-based and real-world tests. The results demonstrate that the radar-enhanced state estimation outperforms other state-of-the-art methods, particularly in terms of robustness to high-speed maneuvers and dynamic off-road environments.
Critical Analysis
The paper provides a comprehensive and well-designed study on leveraging radar-based velocity measurements to enhance state estimation for off-road autonomous navigation. The authors have clearly identified a relevant problem and have presented a novel solution that addresses the limitations of GPS-based approaches in challenging environments.
One potential limitation of the proposed method is its reliance on the availability and accuracy of radar sensors. While radar technology has advanced significantly, it may still be susceptible to interference or occlusion in certain scenarios, which could impact the reliability of the velocity measurements. The authors acknowledge this as an area for future research, suggesting the exploration of sensor fusion techniques to mitigate such issues.
Additionally, the paper does not extensively discuss the computational complexity or real-time performance of the proposed approach. In practical autonomous navigation applications, the state estimation algorithm needs to be efficient enough to run in real-time, which could be an important consideration for deployment in resource-constrained environments.
Overall, the paper presents a valuable contribution to the field of autonomous navigation, especially in the context of off-road environments. The researchers have demonstrated the potential of radar-based velocity factors to enhance state estimation and have provided a strong foundation for further advancements in this area.
Conclusion
This paper introduces a novel approach to robust high-speed state estimation for off-road navigation that leverages radar-based velocity measurements. By integrating radar data into the state estimation process, the researchers were able to improve the accuracy and robustness of the system, particularly in dynamic off-road environments where GPS signals may be unreliable or unavailable.
The experimental results show that the proposed method outperforms other state-of-the-art techniques, highlighting its potential to enhance the performance and safety of autonomous vehicles navigating challenging terrain. While the reliance on radar sensors may be a potential limitation, the paper provides a solid foundation for further research and development in this important area of autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Robust High-Speed State Estimation for Off-road Navigation using Radar Velocity Factors
Morten Nissov, Jeffrey A. Edlund, Patrick Spieler, Curtis Padgett, Kostas Alexis, Shehryar Khattak
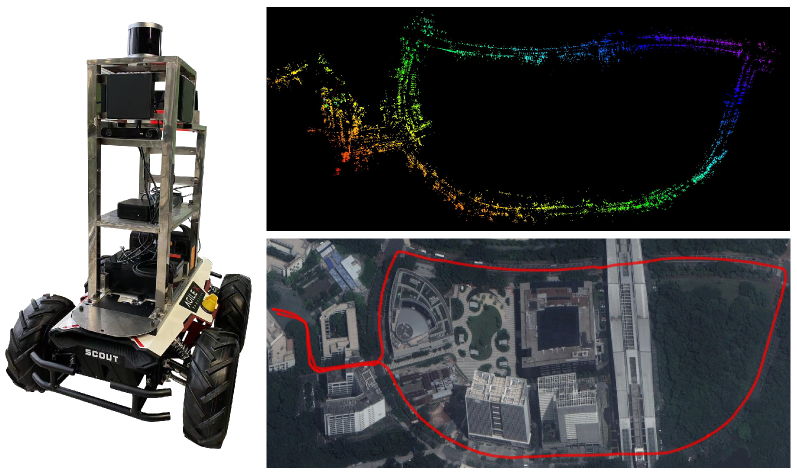
Enabling robot autonomy in complex environments for mission critical application requires robust state estimation. Particularly under conditions where the exteroceptive sensors, which the navigation depends on, can be degraded by environmental challenges thus, leading to mission failure. It is precisely in such challenges where the potential for FMCW radar sensors is highlighted: as a complementary exteroceptive sensing modality with direct velocity measuring capabilities. In this work we integrate radial speed measurements from a FMCW radar sensor, using a radial speed factor, to provide linear velocity updates into a sliding-window state estimator for fusion with LiDAR pose and IMU measurements. We demonstrate that this augmentation increases the robustness of the state estimator to challenging conditions present in the environment and the negative effects they can pose to vulnerable exteroceptive modalities. The proposed method is extensively evaluated using robotic field experiments conducted using an autonomous, full-scale, off-road vehicle operating at high-speeds (~12 m/s) in complex desert environments. Furthermore, the robustness of the approach is demonstrated for cases of both simulated and real-world degradation of the LiDAR odometry performance along with comparison against state-of-the-art methods for radar-inertial odometry on public datasets.
Read more9/18/2024
0
RAVE: A Framework for Radar Ego-Velocity Estimation
Vlaho-Josip v{S}tironja, Luka Petrovi'c, Juraj Perv{s}i'c, Ivan Markovi'c, Ivan Petrovi'c
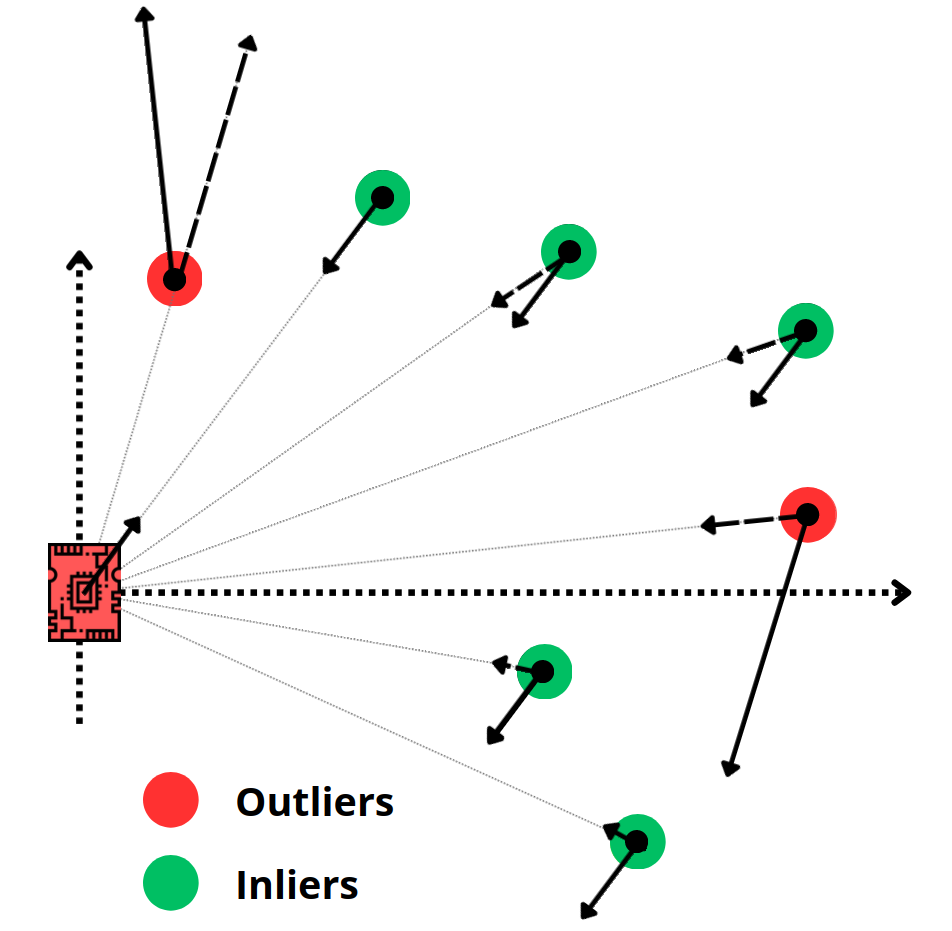
State estimation is an essential component of autonomous systems, usually relying on sensor fusion that integrates data from cameras, LiDARs and IMUs. Recently, radars have shown the potential to improve the accuracy and robustness of state estimation and perception, especially in challenging environmental conditions such as adverse weather and low-light scenarios. In this paper, we present a framework for ego-velocity estimation, which we call RAVE, that relies on 3D automotive radar data and encompasses zero velocity detection, outlier rejection, and velocity estimation. In addition, we propose a simple filtering method to discard infeasible ego-velocity estimates. We also conduct a systematic analysis of how different existing outlier rejection techniques and optimization loss functions impact estimation accuracy. Our evaluation on three open-source datasets demonstrates the effectiveness of the proposed filter and a significant positive impact of RAVE on the odometry accuracy. Furthermore, we release an open-source implementation of the proposed framework for radar ego-velocity estimation accompanied with a ROS interface.
Read more6/28/2024

0
DeRO: Dead Reckoning Based on Radar Odometry With Accelerometers Aided for Robot Localization
Hoang Viet Do, Yong Hun Kim, Joo Han Lee, Min Ho Lee, Jin Woo Song
In this paper, we propose a radar odometry structure that directly utilizes radar velocity measurements for dead reckoning while maintaining its ability to update estimations within the Kalman filter framework. Specifically, we employ the Doppler velocity obtained by a 4D Frequency Modulated Continuous Wave (FMCW) radar in conjunction with gyroscope data to calculate poses. This approach helps mitigate high drift resulting from accelerometer biases and double integration. Instead, tilt angles measured by gravitational force are utilized alongside relative distance measurements from radar scan matching for the filter's measurement update. Additionally, to further enhance the system's accuracy, we estimate and compensate for the radar velocity scale factor. The performance of the proposed method is verified through five real-world open-source datasets. The results demonstrate that our approach reduces position error by 62% and rotation error by 66% on average compared to the state-of-the-art radar-inertial fusion method in terms of absolute trajectory error.
Read more9/14/2024
0
EFEAR-4D: Ego-Velocity Filtering for Efficient and Accurate 4D radar Odometry
Xiaoyi Wu, Yushuai Chen, Zhan Li, Ziyang Hong, Liang Hu
Odometry is a crucial component for successfully implementing autonomous navigation, relying on sensors such as cameras, LiDARs and IMUs. However, these sensors may encounter challenges in extreme weather conditions, such as snowfall and fog. The emergence of FMCW radar technology offers the potential for robust perception in adverse conditions. As the latest generation of FWCW radars, the 4D mmWave radar provides point cloud with range, azimuth, elevation, and Doppler velocity information, despite inherent sparsity and noises in the point cloud. In this paper, we propose EFEAR-4D, an accurate, highly efficient, and learning-free method for large-scale 4D radar odometry estimation. EFEAR-4D exploits Doppler velocity information delicately for robust ego-velocity estimation, resulting in a highly accurate prior guess. EFEAR-4D maintains robustness against point-cloud sparsity and noises across diverse environments through dynamic object removal and effective region-wise feature extraction. Extensive experiments on two publicly available 4D radar datasets demonstrate state-of-the-art reliability and localization accuracy of EFEAR-4D under various conditions. Furthermore, we have collected a dataset following the same route but varying installation heights of the 4D radar, emphasizing the significant impact of radar height on point cloud quality - a crucial consideration for real-world deployments. Our algorithm and dataset will be available soon at https://github.com/CLASS-Lab/EFEAR-4D.
Read more5/17/2024