Rollover Prevention for Mobile Robots with Control Barrier Functions: Differentiator-Based Adaptation and Projection-to-State Safety
2403.08916
0
0

Abstract
This paper develops rollover prevention guarantees for mobile robots using control barrier function (CBF) theory, and demonstrates the method experimentally. We consider a safety measure based on a zero moment point condition through the lens of CBFs. However, these conditions depend on time-varying and noisy parameters. To address this issue, we present a differentiator-based safety-critical controller that estimates these parameters and pairs Input-to-State Stable (ISS) differentiator dynamics with CBFs to achieve rigorous safety guarantees. Additionally, to ensure safety in the presence of disturbances, we utilize a time-varying extension of Projection-to-State Safety (PSSf). The effectiveness of the proposed method is demonstrated via experiments on a tracked robot with a rollover potential on steep slopes.
Create account to get full access
Overview
- This paper presents a novel approach for rollover prevention in mobile robots using control barrier functions (CBFs) and differentiator-based adaptation.
- The proposed method aims to maintain stability and safety by ensuring the robot's center of mass remains within the support polygon, preventing dangerous rollover situations.
- The paper also introduces a projection-to-state safety (PSS) concept to further enhance the robot's ability to navigate safely in dynamic environments.
Plain English Explanation
The researchers developed a way to help mobile robots avoid tipping over or rolling over, which can be a serious safety issue. They used a special type of control system called a control barrier function (CBF) to keep the robot's center of mass within a stable area, preventing it from getting too close to the edge and potentially rolling over.
To make this system more adaptable, they also included a "differentiator-based adaptation" component. This allows the robot to continuously adjust its movements in response to changes in the environment, ensuring it can navigate safely even in dynamic or unpredictable situations.
Additionally, the researchers introduced a concept called "projection-to-state safety" (PSS), which further enhances the robot's ability to move around without putting itself at risk of tipping over. This helps the robot plan its path and actions in a way that keeps it stable and secure, even as it navigates through complex or challenging environments.
The overall goal of this research is to make mobile robots more reliable, stable, and safe, particularly when operating in real-world settings that may involve uneven terrain, moving obstacles, or other unpredictable factors. By combining advanced control systems and safety-focused planning, the researchers hope to enable these robots to operate with a high degree of stability and confidence, even in demanding situations.
Technical Explanation
The paper proposes a rollover prevention framework for mobile robots using control barrier functions (CBFs) and a differentiator-based adaptation mechanism. The key objective is to maintain the robot's center of mass within the support polygon, preventing dangerous rollover scenarios.
The authors first introduce the concept of projection-to-state safety (PSS), which ensures the robot's state remains within a safe set by projecting the future state onto the safe set. This is combined with the CBF approach to define a safe set based on the robot's stability constraints.
The differentiator-based adaptation is then used to handle uncertainties in the robot's dynamics, allowing the system to continuously adjust the control inputs to maintain stability. This approach is similar to using dynamic safety margins as control barriers to ensure safe operation.
The proposed framework is evaluated through simulations and experiments, demonstrating its effectiveness in preventing rollover for mobile robots navigating in dynamic environments with uneven terrain and moving obstacles. The results show the system's ability to maintain sensor-based, distributionally robust control for safe robot operation, even in the presence of uncertainties.
Critical Analysis
The paper presents a promising approach for rollover prevention in mobile robots, addressing a critical safety concern for these systems. The authors' use of CBFs and the projection-to-state safety concept provides a robust framework for maintaining the robot's stability and navigating dynamic environments.
One potential limitation of the work is the reliance on accurate modeling of the robot's dynamics, which can be challenging in real-world scenarios. The authors acknowledge this and propose the differentiator-based adaptation as a way to handle uncertainties, but further research may be needed to evaluate the method's performance under more diverse and unpredictable conditions.
Additionally, the paper does not explore the computational cost and implementation complexity of the proposed framework, which could be an important consideration for practical deployment, especially on resource-constrained robot platforms.
Future research could also investigate the integration of this rollover prevention approach with higher-level planning and decision-making algorithms to create a more comprehensive safety-aware navigation system for mobile robots.
Conclusion
The paper presents a novel rollover prevention framework for mobile robots that combines control barrier functions, differentiator-based adaptation, and projection-to-state safety. This approach aims to maintain the robot's stability and ensure safe navigation, even in the presence of uncertainties and dynamic environmental conditions.
The proposed system demonstrates promising results in simulation and experiments, suggesting its potential to enhance the safety and reliability of mobile robots operating in real-world settings. By addressing the critical issue of rollover prevention, this research contributes to the ongoing efforts to develop more robust and trustworthy autonomous mobile platforms for a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Safe Force/Position Tracking Control via Control Barrier Functions for Floating Base Mobile Manipulator Systems
Maryam Sharifi, Shahab Heshmati-Alamdari
0
0
This paper introduces a safe force/position tracking control strategy designed for Free-Floating Mobile Manipulator Systems (MMSs) engaging in compliant contact with planar surfaces. The strategy uniquely integrates the Control Barrier Function (CBF) to manage operational limitations and safety concerns. It effectively addresses safety-critical aspects in the kinematic as well as dynamic level, such as manipulator joint limits, system velocity constraints, and inherent system dynamic uncertainties. The proposed strategy remains robust to the uncertainties of the MMS dynamic model, external disturbances, or variations in the contact stiffness model. The proposed control method has low computational demand ensures easy implementation on onboard computing systems, endorsing real-time operations. Simulation results verify the strategy's efficacy, reflecting enhanced system performance and safety.
4/23/2024
⛏️
New!Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Chuyuan Tao, Wenbin Wan, Junjie Gao, Bihao Mo, Hunmin Kim, Naira Hovakimyan
0
0
Control Barrier Function (CBF) is an emerging method that guarantees safety in path planning problems by generating a control command to ensure the forward invariance of a safety set. Most of the developments up to date assume availability of correct state measurements and absence of disturbances on the system. However, if the system incurs disturbances and is subject to noise, the CBF cannot guarantee safety due to the distorted state estimate. To improve the resilience and adaptability of the CBF, we propose a resilient estimator-based control barrier function (RE-CBF), which is based on a novel stochastic CBF optimization and resilient estimator, to guarantee the safety of systems with disturbances and noise in the path planning problems. The proposed algorithm uses the resilient estimation algorithm to estimate disturbances and counteract their effect using novel stochastic CBF optimization, providing safe control inputs for dynamical systems with disturbances and noise. To demonstrate the effectiveness of our algorithm in handling both noise and disturbances in dynamics and measurement, we design a quadrotor testing pipeline to simulate the proposed algorithm and then implement the algorithm on a real drone in our flying arena. Both simulations and real-world experiments show that the proposed method can guarantee safety for systems with disturbances and noise.
7/2/2024
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
0
0
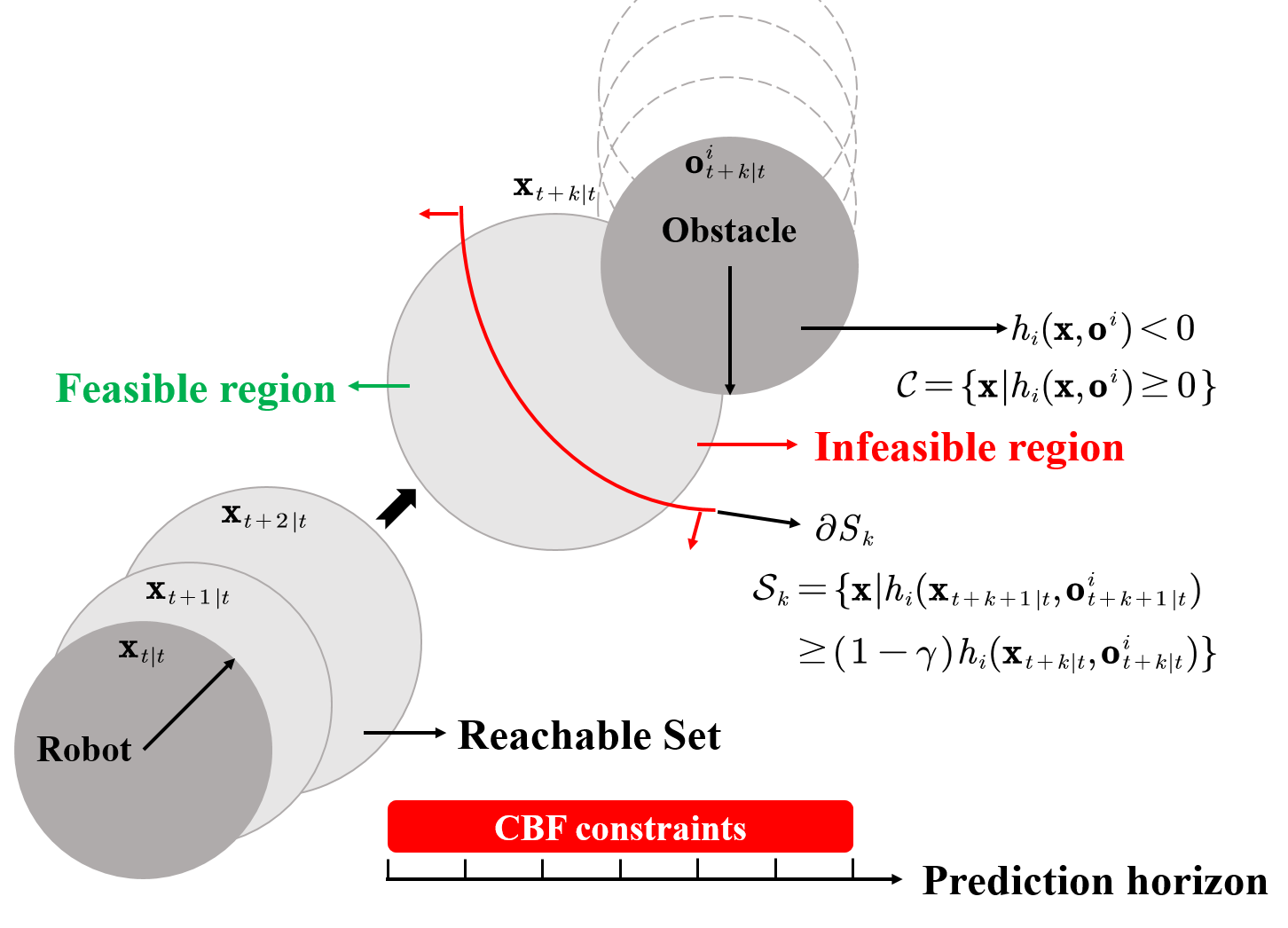
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
4/10/2024

Using Dynamic Safety Margins as Control Barrier Functions
Victor Freire, Marco M. Nicotra
0
0
This paper provides an approach to design control barrier functions (CBFs) using the notion of dynamic safety margins (DSMs). In particular, it is shown that DSMs are CBFs for an augmented system. The proposed approach can handle multiple state and input constraints using the control-sharing property of CBFs. Moreover, it makes no assumption on the relative degree of the constraints. Numerical simulations show that the method outperforms existing DSM-based approaches, while also guaranteeing safety and recursive feasibility.
4/3/2024