Run-time Monitoring of 3D Object Detection in Automated Driving Systems Using Early Layer Neural Activation Patterns

0

Sign in to get full access
Overview
- This paper proposes a method for run-time monitoring of 3D object detection in automated driving systems using early layer neural activation patterns.
- The approach aims to detect failures or anomalies in the object detection system during operation, before they lead to unsafe driving decisions.
- The research explores the use of neural network activation patterns in the early layers as an indicator of potential issues with the 3D object detection.
Plain English Explanation
Automated driving systems rely on computer vision algorithms to detect and track objects around the vehicle, such as other cars, pedestrians, and obstacles. However, these algorithms can sometimes make mistakes, leading to potential safety issues. This paper explores a way to monitor the inner workings of the object detection system during real-time operation, in order to catch problems before they cause harmful driving decisions.
The key idea is to look at the activation patterns within the neural networks used for object detection. These activation patterns, which represent how the network is processing visual information in its early layers, can serve as an early warning sign that the system is not working as expected. By continuously checking these activation patterns, the system can detect when something seems off and trigger a safety check or fallback behavior.
This monitoring approach could help make automated driving systems more robust and reliable, by providing an additional layer of safety checks beyond just the final object detection outputs. It taps into the underlying neural network mechanics to provide greater transparency and performance validation during real-world autonomous vehicle operation.
Technical Explanation
The paper proposes a run-time monitoring framework for 3D object detection in automated driving systems. The approach leverages the activation patterns in the early layers of the neural networks used for object detection as an indicator of system health and performance.
The researchers hypothesize that anomalies or failures in the 3D object detection process will manifest as distinct changes in the neural activation patterns, even before they are reflected in the final outputs. By continuously monitoring these activation patterns, the system can detect potential issues and trigger appropriate safety measures.
The proposed framework consists of three main components:
- Feature Extraction: The neural network activations from the early layers are extracted and used as high-dimensional feature representations of the object detection process.
- Anomaly Detection: An unsupervised anomaly detection model is trained on the feature representations to learn the normal patterns of activation. At run-time, deviations from this normal pattern are flagged as potential anomalies.
- Anomaly Interpretation: When an anomaly is detected, the framework analyzes the specific changes in the activation patterns to provide insights into the nature of the problem, such as which parts of the neural network are behaving abnormally.
The researchers evaluate their approach on several 3D object detection benchmarks, demonstrating its ability to effectively detect failures and anomalies during run-time operation. The results show that this monitoring approach can provide an additional safety layer for autonomous driving systems by catching issues early before they lead to unsafe driving decisions.
Critical Analysis
The paper presents a promising approach for real-time monitoring of 3D object detection systems in autonomous vehicles. By leveraging neural network activation patterns, the framework can potentially detect a wide range of issues, from sensor failures to algorithmic problems, before they manifest in the final object detection outputs.
One limitation of the approach is that it requires training an additional anomaly detection model, which adds complexity and computational overhead to the overall system. The researchers mention that further work is needed to optimize the anomaly detection process and make it more efficient for real-time use in autonomous vehicles.
Additionally, the paper does not explore the performance of the monitoring system under more challenging environmental conditions, such as poor visibility, adverse weather, or complex urban scenes. It would be valuable to understand how the activation pattern-based anomaly detection holds up in these more realistic and demanding scenarios.
Another area for further research is the interpretability of the anomaly detection process. While the paper discusses anomaly interpretation, more work is needed to provide clear and actionable insights to the autonomous driving system operators when issues are detected. Improving the explainability of the monitoring system could enhance its usefulness and trust in the overall autonomous driving stack.
Conclusion
This research presents a novel approach for run-time monitoring of 3D object detection in automated driving systems, leveraging the activation patterns within the underlying neural networks. By continuously checking for anomalies in these activation patterns, the system can potentially detect issues before they lead to unsafe driving decisions.
The proposed framework represents an important step towards making autonomous driving systems more robust and reliable. By providing an additional layer of safety checks beyond just the final object detection outputs, this monitoring approach can help increase the transparency and performance validation of these critical computer vision components.
As autonomous vehicles continue to be developed and deployed, the need for comprehensive monitoring and validation systems will only grow. This research demonstrates the potential of using neural network internals to enhance the real-world safety and trustworthiness of autonomous driving technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Run-time Monitoring of 3D Object Detection in Automated Driving Systems Using Early Layer Neural Activation Patterns
Hakan Yekta Yatbaz, Mehrdad Dianati, Konstantinos Koufos, Roger Woodman
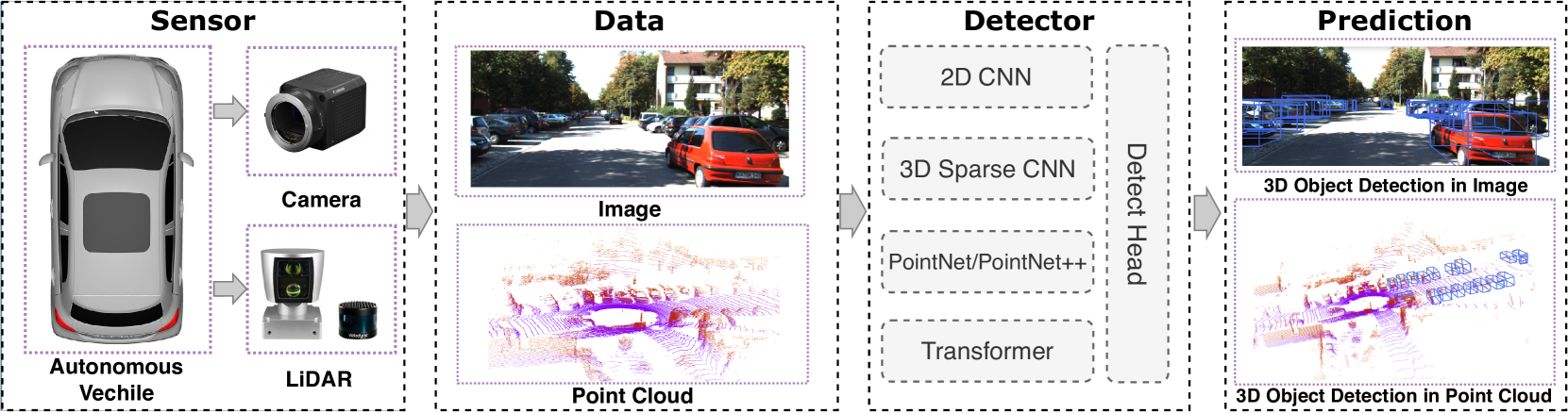
Monitoring the integrity of object detection for errors within the perception module of automated driving systems (ADS) is paramount for ensuring safety. Despite recent advancements in deep neural network (DNN)-based object detectors, their susceptibility to detection errors, particularly in the less-explored realm of 3D object detection, remains a significant concern. State-of-the-art integrity monitoring (also known as introspection) mechanisms in 2D object detection mainly utilise the activation patterns in the final layer of the DNN-based detector's backbone. However, that may not sufficiently address the complexities and sparsity of data in 3D object detection. To this end, we conduct, in this article, an extensive investigation into the effects of activation patterns extracted from various layers of the backbone network for introspecting the operation of 3D object detectors. Through a comparative analysis using Kitti and NuScenes datasets with PointPillars and CenterPoint detectors, we demonstrate that using earlier layers' activation patterns enhances the error detection performance of the integrity monitoring system, yet increases computational complexity. To address the real-time operation requirements in ADS, we also introduce a novel introspection method that combines activation patterns from multiple layers of the detector's backbone and report its performance.
Read more4/12/2024
🔎
0
Integrity Monitoring of 3D Object Detection in Automated Driving Systems using Raw Activation Patterns and Spatial Filtering
Hakan Yekta Yatbaz, Mehrdad Dianati, Konstantinos Koufos, Roger Woodman
The deep neural network (DNN) models are widely used for object detection in automated driving systems (ADS). Yet, such models are prone to errors which can have serious safety implications. Introspection and self-assessment models that aim to detect such errors are therefore of paramount importance for the safe deployment of ADS. Current research on this topic has focused on techniques to monitor the integrity of the perception mechanism in ADS. Existing introspection models in the literature, however, largely concentrate on detecting perception errors by assigning equal importance to all parts of the input data frame to the perception module. This generic approach overlooks the varying safety significance of different objects within a scene, which obscures the recognition of safety-critical errors, posing challenges in assessing the reliability of perception in specific, crucial instances. Motivated by this shortcoming of state of the art, this paper proposes a novel method integrating raw activation patterns of the underlying DNNs, employed by the perception module, analysis with spatial filtering techniques. This novel approach enhances the accuracy of runtime introspection of the DNN-based 3D object detections by selectively focusing on an area of interest in the data, thereby contributing to the safety and efficacy of ADS perception self-assessment processes.
Read more5/14/2024
0
Robustness-Aware 3D Object Detection in Autonomous Driving: A Review and Outlook
Ziying Song, Lin Liu, Feiyang Jia, Yadan Luo, Guoxin Zhang, Lei Yang, Li Wang, Caiyan Jia
In the realm of modern autonomous driving, the perception system is indispensable for accurately assessing the state of the surrounding environment, thereby enabling informed prediction and planning. The key step to this system is related to 3D object detection that utilizes vehicle-mounted sensors such as LiDAR and cameras to identify the size, the category, and the location of nearby objects. Despite the surge in 3D object detection methods aimed at enhancing detection precision and efficiency, there is a gap in the literature that systematically examines their resilience against environmental variations, noise, and weather changes. This study emphasizes the importance of robustness, alongside accuracy and latency, in evaluating perception systems under practical scenarios. Our work presents an extensive survey of camera-only, LiDAR-only, and multi-modal 3D object detection algorithms, thoroughly evaluating their trade-off between accuracy, latency, and robustness, particularly on datasets like KITTI-C and nuScenes-C to ensure fair comparisons. Among these, multi-modal 3D detection approaches exhibit superior robustness, and a novel taxonomy is introduced to reorganize the literature for enhanced clarity. This survey aims to offer a more practical perspective on the current capabilities and the constraints of 3D object detection algorithms in real-world applications, thus steering future research towards robustness-centric advancements.
Read more8/16/2024
🔎
0
Enhancing 3D Object Detection by Using Neural Network with Self-adaptive Thresholding
Houze Liu, Chongqing Wang, Xiaoan Zhan, Haotian Zheng, Chang Che
Robust 3D object detection remains a pivotal concern in the domain of autonomous field robotics. Despite notable enhancements in detection accuracy across standard datasets, real-world urban environments, characterized by their unstructured and dynamic nature, frequently precipitate an elevated incidence of false positives, thereby undermining the reliability of existing detection paradigms. In this context, our study introduces an advanced post-processing algorithm that modulates detection thresholds dynamically relative to the distance from the ego object. Traditional perception systems typically utilize a uniform threshold, which often leads to decreased efficacy in detecting distant objects. In contrast, our proposed methodology employs a Neural Network with a self-adaptive thresholding mechanism that significantly attenuates false negatives while concurrently diminishing false positives, particularly in complex urban settings. Empirical results substantiate that our algorithm not only augments the performance of 3D object detection models in diverse urban and adverse weather scenarios but also establishes a new benchmark for adaptive thresholding techniques in field robotics.
Read more5/14/2024