Runtime Verification Containers for Publish/Subscribe Networks

0

Sign in to get full access
Overview
- Explores the use of runtime verification containers to monitor and verify the behavior of publish/subscribe networks
- Focuses on improving the reliability and safety of these distributed systems
- Proposes a framework that integrates runtime verification into containerized microservices
Plain English Explanation
This paper investigates how to use runtime verification techniques within containerized microservices to improve the reliability and safety of publish/subscribe networks. Publish/subscribe networks are a type of distributed system where components publish messages to a central broker, which then routes those messages to the relevant subscribers.
The researchers recognized that these networks can be challenging to monitor and verify, as the behavior of individual components can be difficult to isolate and observe. To address this, they developed a framework that integrates runtime verification directly into the containerized microservices that make up the network.
Runtime verification is a technique that allows developers to continuously check the behavior of a system against a set of predefined properties or specifications. By embedding this capability within the containers, the researchers were able to monitor the behavior of each microservice and quickly identify any issues or violations of the expected behavior.
The key benefit of this approach is that it enables more robust and reliable publish/subscribe networks, as problems can be detected and addressed in real-time, rather than waiting for issues to manifest in the production environment. This is particularly important for critical applications, such as those found in autonomous driving or industrial control systems, where the consequences of failures can be severe.
Technical Explanation
The researchers developed a framework that integrates runtime verification into containerized microservices for publish/subscribe networks. The framework consists of three main components:
-
Monitoring Containers: These containers are responsible for instrumenting the application code and collecting runtime data, such as method invocations, parameter values, and return values.
-
Verification Containers: These containers execute the runtime verification algorithms, checking the collected data against a set of predefined properties or specifications to detect any violations.
-
Coordination Layer: This component is responsible for orchestrating the deployment and communication between the monitoring and verification containers, as well as providing a mechanism for reporting and resolving any detected issues.
The key advantage of this approach is that it allows for the continuous monitoring and verification of the publish/subscribe network, without requiring changes to the application code itself. By encapsulating the runtime verification logic within separate containers, the framework can be easily integrated into existing containerized microservices architectures.
The researchers evaluated their framework using a set of real-world publish/subscribe network scenarios, including a smart home application and an industrial control system. The results showed that the framework was able to effectively detect and report various types of runtime violations, such as incorrect message routing, missing subscriptions, and invalid parameter values.
Critical Analysis
The researchers have identified an important challenge in ensuring the reliability and safety of publish/subscribe networks, which are becoming increasingly prevalent in a wide range of applications. The proposed framework represents a novel approach to addressing this challenge by integrating runtime verification directly into the containerized microservices that make up these distributed systems.
One potential limitation of the approach is the overhead and complexity introduced by the additional monitoring and verification containers. While the researchers claim that the framework can be easily integrated into existing containerized architectures, the additional resource requirements and potential performance impact may be a concern for some deployments, particularly in resource-constrained environments.
Additionally, the paper does not explore the scalability of the framework as the size and complexity of the publish/subscribe network increases. It would be valuable to understand how the framework would perform in large-scale, highly distributed scenarios, and whether any additional mechanisms would be required to ensure reliable and efficient monitoring and verification.
Overall, the work presented in this paper represents an important step forward in improving the reliability and safety of publish/subscribe networks. The integration of runtime verification into containerized microservices is a promising approach that could have significant implications for a wide range of critical applications. As the use of these distributed systems continues to grow, further research and development in this area will be essential.
Conclusion
This paper proposes a framework that integrates runtime verification into containerized microservices for publish/subscribe networks. By embedding monitoring and verification capabilities directly within the containers, the framework enables continuous monitoring and detection of runtime violations, improving the overall reliability and safety of these distributed systems.
The key advantages of this approach include the ability to quickly identify and address issues in real-time, as well as the ease of integration with existing containerized architectures. While the framework may introduce some additional complexity and overhead, the potential benefits for critical applications, such as autonomous driving and industrial control systems, could be significant.
As publish/subscribe networks continue to grow in importance and complexity, the work presented in this paper represents an important contribution to the field of distributed systems reliability and safety. Further research and development in this area will be crucial for ensuring the robustness and trustworthiness of these technologies as they become more deeply embedded in our daily lives.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Runtime Verification Containers for Publish/Subscribe Networks
Ali Mehran, Dogan Ulus
Publish/subscribe (pub/sub) networks are a cornerstone of modern distributed systems, playing a crucial role in applications like the Internet of Things (IoT) and robotics. While runtime verification techniques seem ideal for ensuring the correctness of such highly dynamic and large-scale networks, integrating runtime monitors seamlessly into real-world industrial use cases presents significant challenges. This paper studies modern containerization technology to deploy runtime verification tools to monitor publish/subscribe networks with a performance focus. Runtime verification containers are lightweight and deployable alongside other containerized publisher and subscriber participants. Each runtime verification container monitors message flow, enabling runtime verification of network behavior. We comprehensively benchmark the container-based approach using several experiments and a real-world case study from the software-defined vehicle domain.
Read more8/14/2024
🎲
0
A Containerized Microservice Architecture for a ROS 2 Autonomous Driving Software: An End-to-End Latency Evaluation
Tobias Betz, Long Wen, Fengjunjie Pan, Gemb Kaljavesi, Alexander Zuepke, Andrea Bastoni, Marco Caccamo, Alois Knoll, Johannes Betz
The automotive industry is transitioning from traditional ECU-based systems to software-defined vehicles. A central role of this revolution is played by containers, lightweight virtualization technologies that enable the flexible consolidation of complex software applications on a common hardware platform. Despite their widespread adoption, the impact of containerization on fundamental real-time metrics such as end-to-end latency, communication jitter, as well as memory and CPU utilization has remained virtually unexplored. This paper presents a microservice architecture for a real-world autonomous driving application where containers isolate each service. Our comprehensive evaluation shows the benefits in terms of end-to-end latency of such a solution even over standard bare-Linux deployments. Specifically, in the case of the presented microservice architecture, the mean end-to-end latency can be improved by 5-8 %. Also, the maximum latencies were significantly reduced using container deployment.
Read more4/22/2024
0
Continuous reasoning for adaptive container image distribution in the cloud-edge continuum
Damiano Azzolini, Stefano Forti, Antonio Ielo
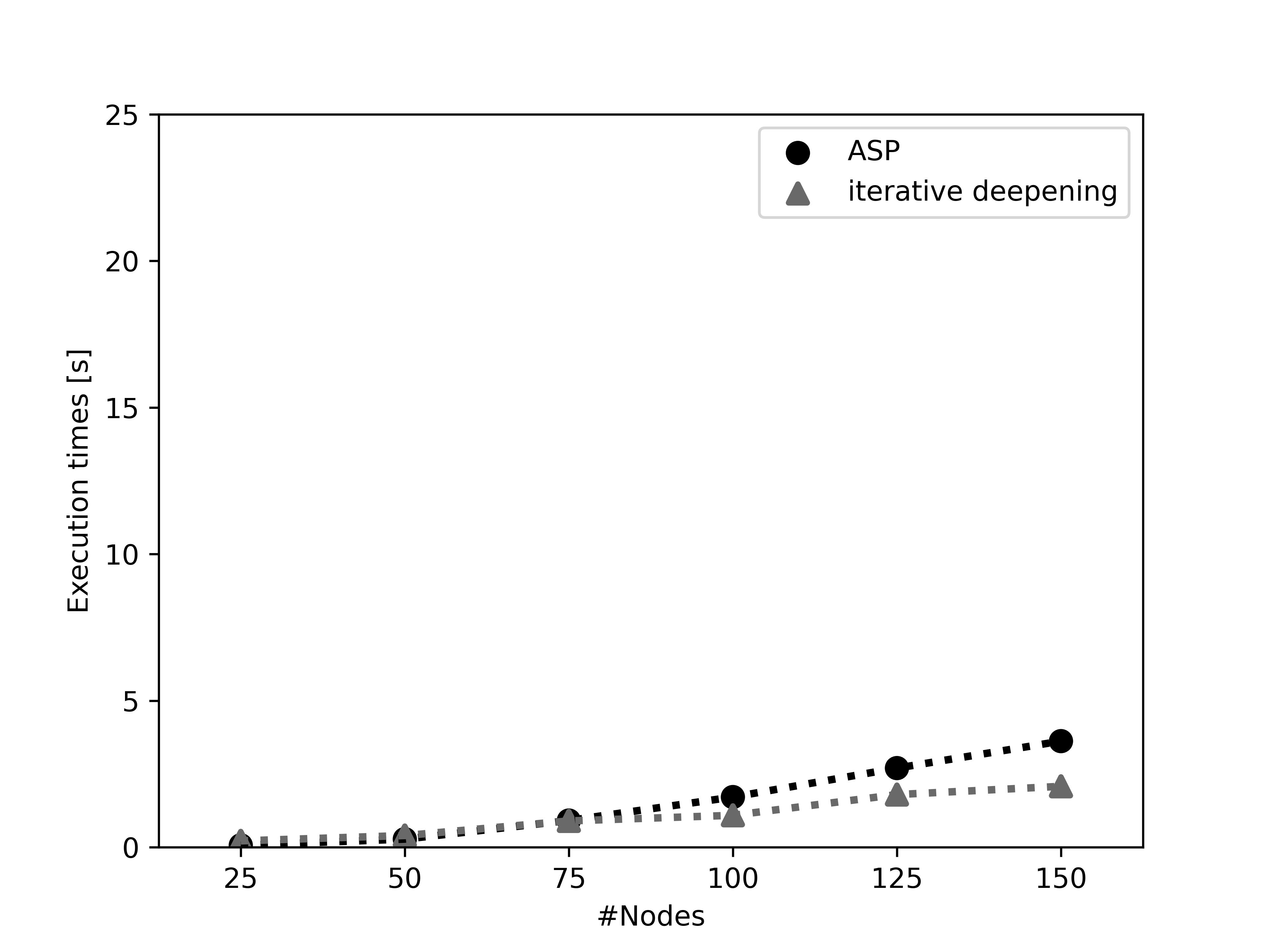
Cloud-edge computing requires applications to operate across diverse infrastructures, often triggered by cyber-physical events. Containers offer a lightweight deployment option but pulling images from central repositories can cause delays. This article presents a novel declarative approach and open-source prototype for replicating container images across the cloud-edge continuum. Considering resource availability, network QoS, and storage costs, we leverage logic programming to (i) determine optimal initial placements via Answer Set Programming (ASP) and (ii) adapt placements using Prolog-based continuous reasoning. We evaluate our solution through simulations, showcasing how combining ASP and Prolog continuous reasoning can balance cost optimisation and prompt decision-making in placement adaptation at increasing infrastructure sizes.
Read more7/18/2024
0
Runtime Verification and Field-based Testing for ROS-Based Robotic Systems
Ricardo Caldas, Juan Antonio Pinera Garcia, Matei Schiopu, Patrizio Pelliccione, Genaina Rodrigues, Thorsten Berger
Robotic systems are becoming pervasive and adopted in increasingly many domains, such as manufacturing, healthcare, and space exploration. To this end, engineering software has emerged as a crucial discipline for building maintainable and reusable robotic systems. The robotics software engineering research field has received increasing attention, fostering autonomy as a fundamental goal. However, robotics developers are still challenged to achieve this goal because simulation cannot realistically deliver solutions to emulate real-world phenomena. Robots also need to operate in unpredictable and uncontrollable environments, which require safe and trustworthy self-adaptation capabilities implemented in software. Typical techniques to address the challenges are runtime verification, field-based testing, and mitigation techniques that enable fail-safe solutions. However, no clear guidance exists for architecting ROS-based systems to enable and facilitate runtime verification and field-based testing. This paper aims to fill this gap by providing guidelines to help developers and quality assurance (QA) teams develop, verify, or test their robots in the field. These guidelines are carefully tailored to address the challenges and requirements of testing robotics systems in real-world scenarios. We conducted (i) a literature review on studies addressing runtime verification and field-based testing for robotic systems, (ii) mined ROS-based applications repositories, and (iii) validated the applicability, clarity, and usefulness via two questionnaires with 55 answers overall. We contribute 20 guidelines: 8 for developers and 12 for QA teams formulated for researchers and practitioners in robotic software engineering. Finally, we map our guidelines to open challenges in runtime verification and field-based testing for ROS-based systems, and we outline promising research directions in the field.
Read more8/22/2024