Sample-Efficient and Surrogate-Based Design Optimization of Underwater Vehicle Hulls
2304.12420
0
0
🛠️
Abstract
Physics simulations like computational fluid dynamics (CFD) are a computational bottleneck in computer-aided design (CAD) optimization processes. To overcome this bottleneck, one requires either an optimization framework that is highly sample-efficient, or a fast data-driven proxy (surrogate model) for long-running simulations. Both approaches have benefits and limitations. Bayesian optimization is often used for sample efficiency, but it solves one specific problem and struggles with transferability; alternatively, surrogate models can offer fast and often more generalizable solutions for CFD problems, but gathering data for and training such models can be computationally demanding. In this work, we leverage recent advances in optimization and artificial intelligence (AI) to explore both of these potential approaches, in the context of designing an optimal unmanned underwater vehicle (UUV) hull. Our study finds that the Bayesian Optimization-Lower Condition Bound (BO-LCB) algorithm is the most sample-efficient optimization framework and has the best convergence behavior of those considered. Subsequently, we show that our DNN-based surrogate model predicts drag force on test data in tight agreement with CFD simulations, with a mean absolute percentage error (MAPE) of 1.85%. Combining these results, we demonstrate a two-orders-of-magnitude speedup (with comparable accuracy) for the design optimization process when the surrogate model is used. To our knowledge, this is the first study applying Bayesian optimization and DNN-based surrogate modeling to the problem of UUV design optimization, and we share our developments as open-source software.
Create account to get full access
The paper discusses two approaches to overcome the computational bottleneck in physics simulations like computational fluid dynamics (CFD) used in computer-aided design (CAD) optimization processes.
The first approach is using a highly sample-efficient optimization framework like Bayesian optimization, which solves specific problems but struggles with transferability. The second approach is using fast data-driven proxy models (surrogate models) for long-running simulations, which can offer fast and generalizable solutions but require extensive data and training.
The study explored both approaches in the context of designing an optimal unmanned underwater vehicle (UUV) hull. It found that the Bayesian Optimization-Lower Condition Bound (BO-LCB) algorithm was the most sample-efficient and had the best convergence behavior among the optimization frameworks considered.
Additionally, the deep neural network (DNN)-based surrogate model accurately predicted drag force on test data, with a mean absolute percentage error (MAPE) of 1.85% compared to CFD simulations.
Combining these results, the study demonstrated a 100-fold speedup (with comparable accuracy) for the design optimization process when using the surrogate model.
The paper claims to be the first study applying Bayesian optimization and DNN-based surrogate modeling to UUV design optimization and shares the developments as open-source software.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Bayesian Mesh Optimization for Graph Neural Networks to Enhance Engineering Performance Prediction
Jangseop Park, Namwoo Kang
0
0
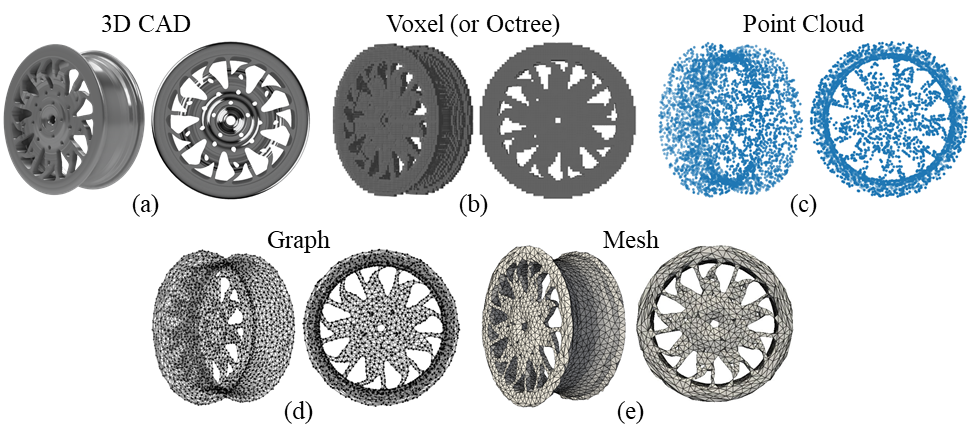
In engineering design, surrogate models are widely employed to replace computationally expensive simulations by leveraging design variables and geometric parameters from computer-aided design (CAD) models. However, these models often lose critical information when simplified to lower dimensions and face challenges in parameter definition, especially with the complex 3D shapes commonly found in industrial datasets. To address these limitations, we propose a Bayesian graph neural network (GNN) framework for a 3D deep-learning-based surrogate model that predicts engineering performance by directly learning geometric features from CAD using mesh representation. Our framework determines the optimal size of mesh elements through Bayesian optimization, resulting in a high-accuracy surrogate model. Additionally, it effectively handles the irregular and complex structures of 3D CADs, which differ significantly from the regular and uniform pixel structures of 2D images typically used in deep learning. Experimental results demonstrate that the quality of the mesh significantly impacts the prediction accuracy of the surrogate model, with an optimally sized mesh achieving superior performance. We compare the performance of models based on various 3D representations such as voxel, point cloud, and graph, and evaluate the computational costs of Monte Carlo simulation and Bayesian optimization methods to find the optimal mesh size. We anticipate that our proposed framework has the potential to be applied to mesh-based simulations across various engineering fields, leveraging physics-based information commonly used in computer-aided engineering.
6/5/2024
🧠
A Study of Bayesian Neural Network Surrogates for Bayesian Optimization
Yucen Lily Li, Tim G. J. Rudner, Andrew Gordon Wilson
0
0
Bayesian optimization is a highly efficient approach to optimizing objective functions which are expensive to query. These objectives are typically represented by Gaussian process (GP) surrogate models which are easy to optimize and support exact inference. While standard GP surrogates have been well-established in Bayesian optimization, Bayesian neural networks (BNNs) have recently become practical function approximators, with many benefits over standard GPs such as the ability to naturally handle non-stationarity and learn representations for high-dimensional data. In this paper, we study BNNs as alternatives to standard GP surrogates for optimization. We consider a variety of approximate inference procedures for finite-width BNNs, including high-quality Hamiltonian Monte Carlo, low-cost stochastic MCMC, and heuristics such as deep ensembles. We also consider infinite-width BNNs, linearized Laplace approximations, and partially stochastic models such as deep kernel learning. We evaluate this collection of surrogate models on diverse problems with varying dimensionality, number of objectives, non-stationarity, and discrete and continuous inputs. We find: (i) the ranking of methods is highly problem dependent, suggesting the need for tailored inductive biases; (ii) HMC is the most successful approximate inference procedure for fully stochastic BNNs; (iii) full stochasticity may be unnecessary as deep kernel learning is relatively competitive; (iv) deep ensembles perform relatively poorly; (v) infinite-width BNNs are particularly promising, especially in high dimensions.
5/9/2024
🐍
Efficient Learning of Accurate Surrogates for Simulations of Complex Systems
A. Diaw, M. McKerns, I. Sagert, L. G. Stanton, M. S. Murillo
0
0
Machine learning methods are increasingly used to build computationally inexpensive surrogates for complex physical models. The predictive capability of these surrogates suffers when data are noisy, sparse, or time-dependent. As we are interested in finding a surrogate that provides valid predictions of any potential future model evaluations, we introduce an online learning method empowered by optimizer-driven sampling. The method has two advantages over current approaches. First, it ensures that all turning points on the model response surface are included in the training data. Second, after any new model evaluations, surrogates are tested and retrained (updated) if the score drops below a validity threshold. Tests on benchmark functions reveal that optimizer-directed sampling generally outperforms traditional sampling methods in terms of accuracy around local extrema, even when the scoring metric favors overall accuracy. We apply our method to simulations of nuclear matter to demonstrate that highly accurate surrogates for the nuclear equation of state can be reliably auto-generated from expensive calculations using a few model evaluations.
5/20/2024

Seamless Underwater Navigation with Limited Doppler Velocity Log Measurements
Nadav Cohen, Itzik Klein
0
0
Autonomous Underwater Vehicles (AUVs) commonly utilize an inertial navigation system (INS) and a Doppler velocity log (DVL) for underwater navigation. To that end, their measurements are integrated through a nonlinear filter such as the extended Kalman filter (EKF). The DVL velocity vector estimate depends on retrieving reflections from the seabed, ensuring that at least three out of its four transmitted acoustic beams return successfully. When fewer than three beams are obtained, the DVL cannot provide a velocity update to bind the navigation solution drift. To cope with this challenge, in this paper, we propose a hybrid neural coupled (HNC) approach for seamless AUV navigation in situations of limited DVL measurements. First, we drive an approach to regress two or three missing DVL beams. Then, those beams, together with the measured beams, are incorporated into the EKF. We examined INS/DVL fusion both in loosely and tightly coupled approaches. Our method was trained and evaluated on recorded data from AUV experiments conducted in the Mediterranean Sea on two different occasions. The results illustrate that our proposed method outperforms the baseline loosely and tightly coupled model-based approaches by an average of 96.15%. It also demonstrates superior performance compared to a model-based beam estimator by an average of 12.41% in terms of velocity accuracy for scenarios involving two or three missing beams. Therefore, we demonstrate that our approach offers seamless AUV navigation in situations of limited beam measurements.
4/23/2024