Segment Any 3D Object with Language
2404.02157
0
0
💬
Abstract
In this paper, we investigate Open-Vocabulary 3D Instance Segmentation (OV-3DIS) with free-form language instructions. Earlier works that rely on only annotated base categories for training suffer from limited generalization to unseen novel categories. Recent works mitigate poor generalizability to novel categories by generating class-agnostic masks or projecting generalized masks from 2D to 3D, but disregard semantic or geometry information, leading to sub-optimal performance. Instead, generating generalizable but semantic-related masks directly from 3D point clouds would result in superior outcomes. In this paper, we introduce Segment any 3D Object with LanguagE (SOLE), which is a semantic and geometric-aware visual-language learning framework with strong generalizability by generating semantic-related masks directly from 3D point clouds. Specifically, we propose a multimodal fusion network to incorporate multimodal semantics in both backbone and decoder. In addition, to align the 3D segmentation model with various language instructions and enhance the mask quality, we introduce three types of multimodal associations as supervision. Our SOLE outperforms previous methods by a large margin on ScanNetv2, ScanNet200, and Replica benchmarks, and the results are even close to the fully-supervised counterpart despite the absence of class annotations in the training. Furthermore, extensive qualitative results demonstrate the versatility of our SOLE to language instructions.
Create account to get full access
Overview
- This paper introduces a new approach for 3D instance segmentation called "Segment any 3D Object with LanguagE" (SOLE).
- Earlier methods struggled to generalize to new object categories, but SOLE can segment objects from 3D point clouds using free-form language instructions.
- SOLE generates semantic-related object masks directly from 3D data, allowing it to perform well on both seen and unseen object categories.
Plain English Explanation
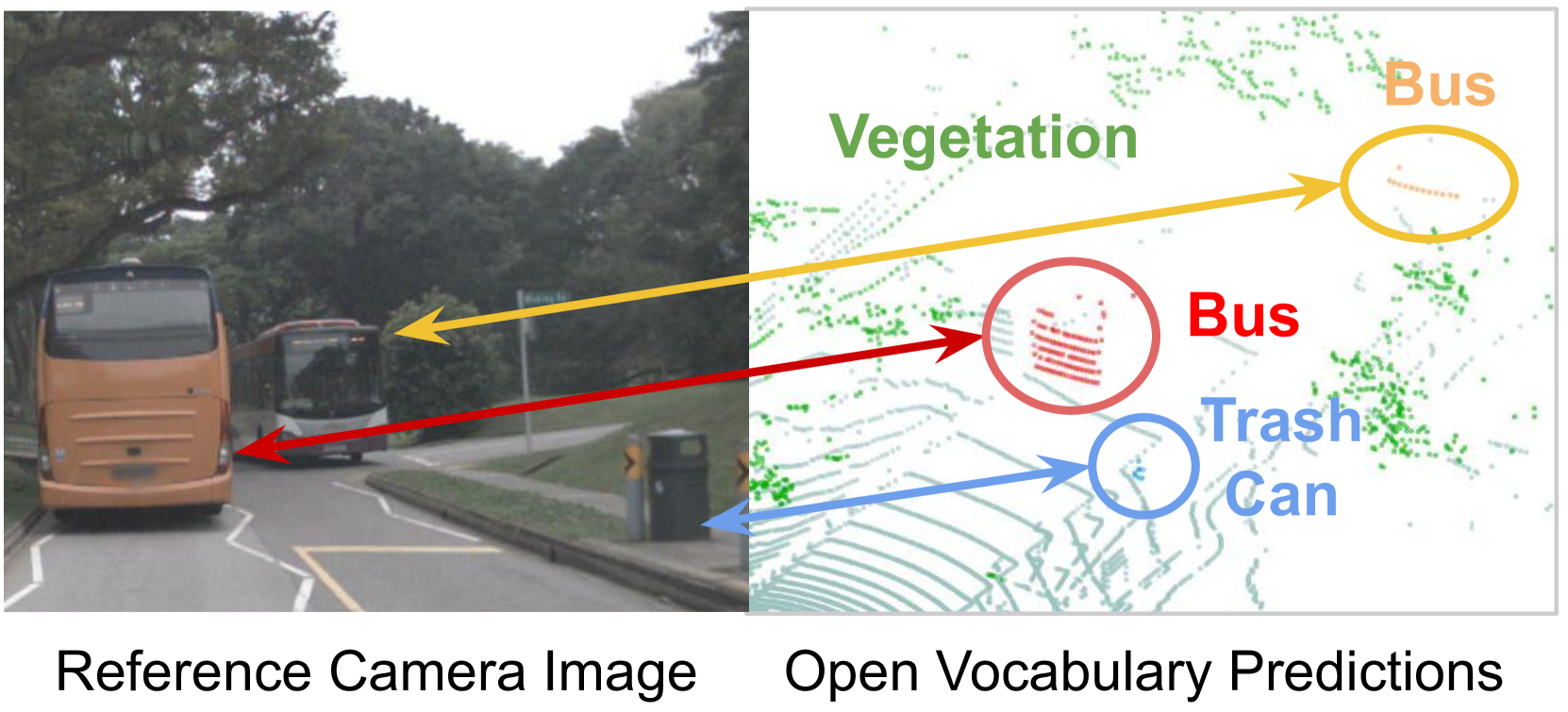
Imagine you're looking at a cluttered 3D scene, like a messy room or a busy street. You want to pick out and highlight a specific object, but you don't know the name or category of that object. With traditional 3D segmentation methods, you'd be limited to only the object types the system was trained on.
The SOLE approach changes that. It allows you to simply describe the object you want to segment, using natural language instructions. The system then analyzes the 3D point cloud data and generates an accurate outline or "mask" of that object, even if it's a type of object the system hasn't seen before.
This is accomplished by teaching the system to understand the semantic and geometric relationships between objects, not just their predefined categories. So when you say "the blue chair in the corner," SOLE can identify the correct object, rather than being limited to only chairs it was explicitly trained on.
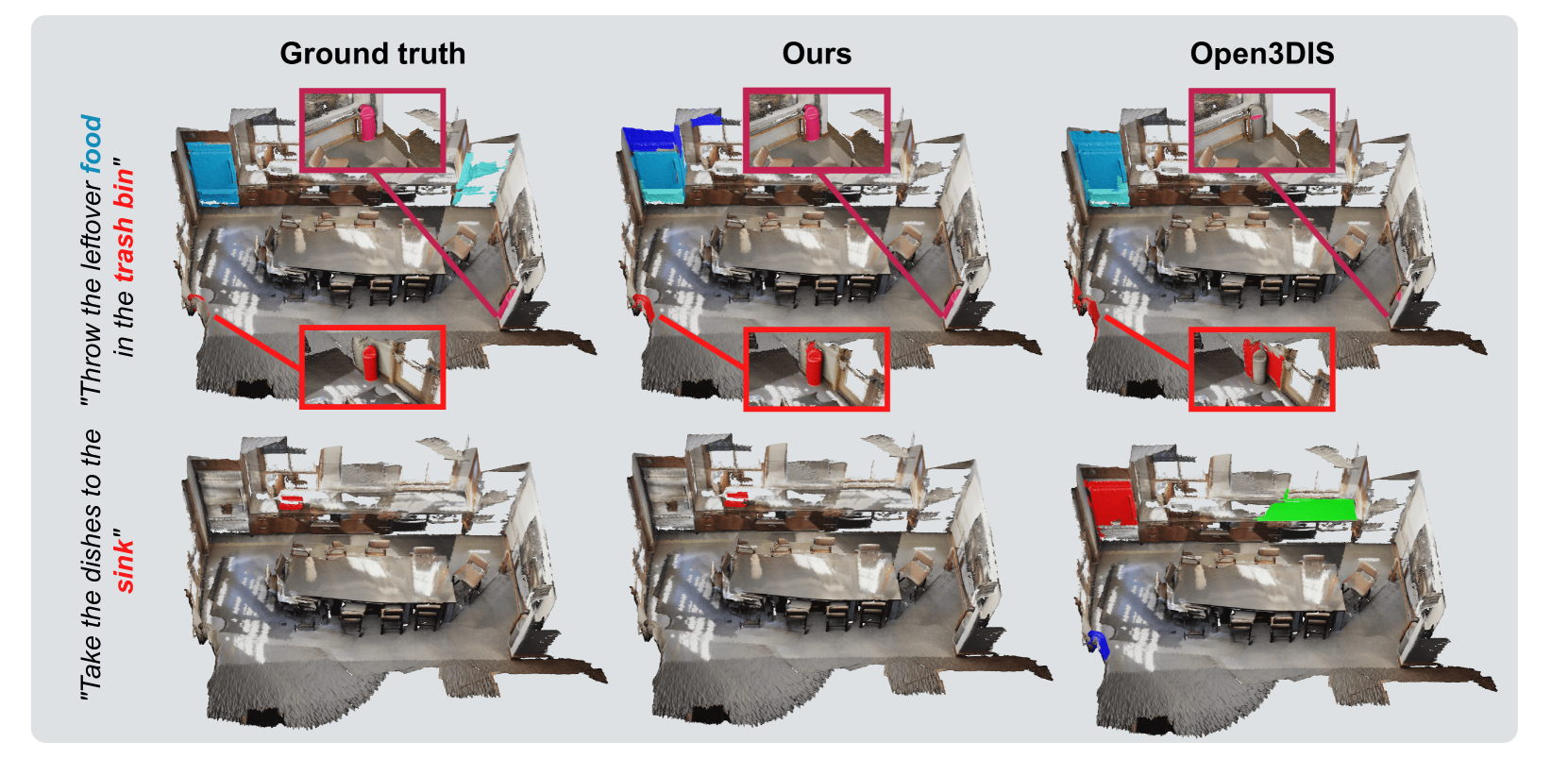
The key innovation is SOLE's ability to directly generate these semantic-aware object masks from the 3D data, rather than relying on intermediate steps that could lose important information. This allows SOLE to perform 3D instance segmentation with impressive accuracy, even for novel object types.
Technical Explanation
SOLE uses a multimodal fusion network to combine visual and language information. The backbone network processes the 3D point cloud data, while a language encoder handles the free-form text instructions. These are brought together in the decoder to generate the final object segmentation masks.
To align the 3D segmentation with the language inputs, the authors introduce three types of multimodal associations as supervised learning signals:
- Object-Word Alignment: Ensures the generated mask corresponds to the mentioned object.
- Mask-Instruction Alignment: Encourages the mask to capture the semantic and geometric properties described in the language.
- Mask Quality Alignment: Directly optimizes the quality of the generated segmentation masks.
Experiments on benchmark datasets like ScanNetv2 and Replica show SOLE outperforming previous state-of-the-art methods by a large margin, even approaching the performance of fully-supervised baselines despite not using any class annotations during training.
Critical Analysis
A key strength of SOLE is its ability to generalize to novel object categories, going beyond the limitations of earlier approaches. However, the paper does not deeply explore the model's robustness to more complex or ambiguous language instructions.
Additionally, while the results are impressive, the paper does not provide much insight into failure cases or the types of objects/scenes where SOLE may struggle. Further analysis in this direction could help identify areas for future improvement.
Finally, the computationally-intensive nature of 3D point cloud processing remains a challenge. Exploring ways to make SOLE more efficient or leveraging recent advancements in 3D deep learning could enhance its practical applicability.
Conclusion
The SOLE framework represents an important step forward in 3D instance segmentation, allowing users to describe and isolate objects of interest using natural language, even for novel categories. By directly generating semantic-aware masks from 3D data, SOLE achieves strong performance that approaches fully-supervised baselines.
This research highlights the potential for multimodal learning to unlock new capabilities in computer vision, bridging the gap between human understanding and machine perception. As 3D sensing technologies become more ubiquitous, tools like SOLE could enable more intuitive and powerful 3D interaction and analysis across a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Open3DIS: Open-Vocabulary 3D Instance Segmentation with 2D Mask Guidance
Phuc D. A. Nguyen, Tuan Duc Ngo, Evangelos Kalogerakis, Chuang Gan, Anh Tran, Cuong Pham, Khoi Nguyen
0
0
We introduce Open3DIS, a novel solution designed to tackle the problem of Open-Vocabulary Instance Segmentation within 3D scenes. Objects within 3D environments exhibit diverse shapes, scales, and colors, making precise instance-level identification a challenging task. Recent advancements in Open-Vocabulary scene understanding have made significant strides in this area by employing class-agnostic 3D instance proposal networks for object localization and learning queryable features for each 3D mask. While these methods produce high-quality instance proposals, they struggle with identifying small-scale and geometrically ambiguous objects. The key idea of our method is a new module that aggregates 2D instance masks across frames and maps them to geometrically coherent point cloud regions as high-quality object proposals addressing the above limitations. These are then combined with 3D class-agnostic instance proposals to include a wide range of objects in the real world. To validate our approach, we conducted experiments on three prominent datasets, including ScanNet200, S3DIS, and Replica, demonstrating significant performance gains in segmenting objects with diverse categories over the state-of-the-art approaches.
4/9/2024
3D Open-Vocabulary Panoptic Segmentation with 2D-3D Vision-Language Distillation
Zihao Xiao, Longlong Jing, Shangxuan Wu, Alex Zihao Zhu, Jingwei Ji, Chiyu Max Jiang, Wei-Chih Hung, Thomas Funkhouser, Weicheng Kuo, Anelia Angelova, Yin Zhou, Shiwei Sheng
0
0
3D panoptic segmentation is a challenging perception task, especially in autonomous driving. It aims to predict both semantic and instance annotations for 3D points in a scene. Although prior 3D panoptic segmentation approaches have achieved great performance on closed-set benchmarks, generalizing these approaches to unseen things and unseen stuff categories remains an open problem. For unseen object categories, 2D open-vocabulary segmentation has achieved promising results that solely rely on frozen CLIP backbones and ensembling multiple classification outputs. However, we find that simply extending these 2D models to 3D does not guarantee good performance due to poor per-mask classification quality, especially for novel stuff categories. In this paper, we propose the first method to tackle 3D open-vocabulary panoptic segmentation. Our model takes advantage of the fusion between learnable LiDAR features and dense frozen vision CLIP features, using a single classification head to make predictions for both base and novel classes. To further improve the classification performance on novel classes and leverage the CLIP model, we propose two novel loss functions: object-level distillation loss and voxel-level distillation loss. Our experiments on the nuScenes and SemanticKITTI datasets show that our method outperforms the strong baseline by a large margin.
4/4/2024

PARIS3D: Reasoning-based 3D Part Segmentation Using Large Multimodal Model
Amrin Kareem, Jean Lahoud, Hisham Cholakkal
0
0
Recent advancements in 3D perception systems have significantly improved their ability to perform visual recognition tasks such as segmentation. However, these systems still heavily rely on explicit human instruction to identify target objects or categories, lacking the capability to actively reason and comprehend implicit user intentions. We introduce a novel segmentation task known as reasoning part segmentation for 3D objects, aiming to output a segmentation mask based on complex and implicit textual queries about specific parts of a 3D object. To facilitate evaluation and benchmarking, we present a large 3D dataset comprising over 60k instructions paired with corresponding ground-truth part segmentation annotations specifically curated for reasoning-based 3D part segmentation. We propose a model that is capable of segmenting parts of 3D objects based on implicit textual queries and generating natural language explanations corresponding to 3D object segmentation requests. Experiments show that our method achieves competitive performance to models that use explicit queries, with the additional abilities to identify part concepts, reason about them, and complement them with world knowledge. Our source code, dataset, and trained models are available at https://github.com/AmrinKareem/PARIS3D.
4/8/2024
Open-YOLO 3D: Towards Fast and Accurate Open-Vocabulary 3D Instance Segmentation
Mohamed El Amine Boudjoghra, Angela Dai, Jean Lahoud, Hisham Cholakkal, Rao Muhammad Anwer, Salman Khan, Fahad Shahbaz Khan
0
0
Recent works on open-vocabulary 3D instance segmentation show strong promise, but at the cost of slow inference speed and high computation requirements. This high computation cost is typically due to their heavy reliance on 3D clip features, which require computationally expensive 2D foundation models like Segment Anything (SAM) and CLIP for multi-view aggregation into 3D. As a consequence, this hampers their applicability in many real-world applications that require both fast and accurate predictions. To this end, we propose a fast yet accurate open-vocabulary 3D instance segmentation approach, named Open-YOLO 3D, that effectively leverages only 2D object detection from multi-view RGB images for open-vocabulary 3D instance segmentation. We address this task by generating class-agnostic 3D masks for objects in the scene and associating them with text prompts. We observe that the projection of class-agnostic 3D point cloud instances already holds instance information; thus, using SAM might only result in redundancy that unnecessarily increases the inference time. We empirically find that a better performance of matching text prompts to 3D masks can be achieved in a faster fashion with a 2D object detector. We validate our Open-YOLO 3D on two benchmarks, ScanNet200 and Replica, under two scenarios: (i) with ground truth masks, where labels are required for given object proposals, and (ii) with class-agnostic 3D proposals generated from a 3D proposal network. Our Open-YOLO 3D achieves state-of-the-art performance on both datasets while obtaining up to $sim$16$times$ speedup compared to the best existing method in literature. On ScanNet200 val. set, our Open-YOLO 3D achieves mean average precision (mAP) of 24.7% while operating at 22 seconds per scene. Code and model are available at github.com/aminebdj/OpenYOLO3D.
6/21/2024