Self-Updating Vehicle Monitoring Framework Employing Distributed Acoustic Sensing towards Real-World Settings

0

Sign in to get full access
Overview
- This paper describes a self-updating vehicle monitoring framework that uses distributed acoustic sensing to monitor vehicles in real-world settings.
- The key components of the framework include distributed acoustic sensing, semi-supervised learning for object detection, and self-updating capabilities.
- The framework is designed to provide enhanced vehicle environmental awareness and enable applications like traffic monitoring and autonomous driving.
Plain English Explanation
The paper presents a system that uses distributed acoustic sensing to monitor vehicles in the real world. Distributed acoustic sensing involves using a network of microphones or sensors to detect and track sounds, in this case the sounds of vehicles.
The system utilizes semi-supervised learning for object detection, which means it can learn to identify vehicles from a small amount of labeled data and then apply that knowledge to a larger, unlabeled dataset. This allows the system to adapt and improve over time without requiring constant manual labeling of data.
Additionally, the framework has "self-updating" capabilities, which means it can continuously update and refine its vehicle detection and tracking models as new data becomes available. This allows the system to stay current and effective in evolving real-world environments.
The goal of this framework is to provide enhanced vehicle environmental awareness for applications like traffic monitoring and autonomous driving. By using distributed acoustic sensing and adaptive learning, the system can effectively track vehicles without the need for expensive cameras or other specialized hardware.
Technical Explanation
The key technical components of the self-updating vehicle monitoring framework include:
-
Distributed Acoustic Sensing: The system utilizes a network of microphones or acoustic sensors distributed throughout the monitoring area. These sensors capture the sounds of passing vehicles, which are then analyzed to detect and track the vehicles.
-
Semi-Supervised Learning: The vehicle detection and tracking models are trained using a combination of labeled and unlabeled data. This semi-supervised approach allows the system to learn from a small amount of labeled data and then apply that knowledge to a larger, unlabeled dataset, improving performance over time.
-
Self-Updating Capabilities: The framework is designed to continuously update its vehicle detection and tracking models as new data becomes available. This self-updating mechanism ensures the system can adapt to changes in the real-world environment, such as new vehicle types or driving patterns.
The authors evaluate the framework's performance in various real-world scenarios, demonstrating its effectiveness in vehicle monitoring tasks. The results show the system can accurately detect and track vehicles using only the acoustic signals, without the need for additional sensors or specialized hardware.
Critical Analysis
The paper presents a comprehensive and well-designed framework for vehicle monitoring using distributed acoustic sensing. The key strengths of the research include:
- Adaptability: The self-updating capabilities of the framework allow it to adapt to changes in the real-world environment, making it suitable for long-term deployment and monitoring tasks.
- Cost-effectiveness: By relying on acoustic sensors instead of more expensive cameras or other hardware, the system can be deployed more widely and at a lower cost.
- Privacy-preserving: The use of acoustic sensing, rather than visual data, can help address privacy concerns associated with traditional vehicle monitoring systems.
However, the paper also acknowledges some limitations and areas for further research:
- Sensor coverage: The performance of the system may be affected by the density and placement of the acoustic sensors, which could be challenging to optimize in large-scale deployments.
- Environmental noise: The system's ability to detect and track vehicles may be impacted by background noise or other acoustic interference in real-world settings.
- Generalization: The authors suggest evaluating the framework's performance on a more diverse set of vehicle types and driving conditions to assess its broad applicability.
Future research could explore ways to further enhance the system's robustness to environmental factors, as well as investigate methods for optimizing sensor placement and coverage to improve overall performance.
Conclusion
This paper presents a self-updating vehicle monitoring framework that leverages distributed acoustic sensing and semi-supervised learning to track vehicles in real-world settings. The key strengths of the system include its adaptability, cost-effectiveness, and privacy-preserving nature. While the research shows promising results, the authors also identify areas for further improvement and exploration, such as addressing environmental noise and optimizing sensor coverage.
Overall, this work demonstrates the potential of using acoustic sensing and adaptive learning techniques for vehicle monitoring applications, which could have significant implications for traffic management, autonomous driving, and other transportation-related domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Self-Updating Vehicle Monitoring Framework Employing Distributed Acoustic Sensing towards Real-World Settings
Xi Wang, Xin Liu, Songming Zhu, Zhanwen Li, Lina Gao
The recent emergence of Distributed Acoustic Sensing (DAS) technology has facilitated the effective capture of traffic-induced seismic data. The traffic-induced seismic wave is a prominent contributor to urban vibrations and contain crucial information to advance urban exploration and governance. However, identifying vehicular movements within massive noisy data poses a significant challenge. In this study, we introduce a real-time semi-supervised vehicle monitoring framework tailored to urban settings. It requires only a small fraction of manual labels for initial training and exploits unlabeled data for model improvement. Additionally, the framework can autonomously adapt to newly collected unlabeled data. Before DAS data undergo object detection as two-dimensional images to preserve spatial information, we leveraged comprehensive one-dimensional signal preprocessing to mitigate noise. Furthermore, we propose a novel prior loss that incorporates the shapes of vehicular traces to track a single vehicle with varying speeds. To evaluate our model, we conducted experiments with seismic data from the Stanford 2 DAS Array. The results showed that our model outperformed the baseline model Efficient Teacher and its supervised counterpart, YOLO (You Only Look Once), in both accuracy and robustness. With only 35 labeled images, our model surpassed YOLO's mAP 0.5:0.95 criterion by 18% and showed a 7% increase over Efficient Teacher. We conducted comparative experiments with multiple update strategies for self-updating and identified an optimal approach. This approach surpasses the performance of non-overfitting training conducted with all data in a single pass.
Read more9/17/2024

0
Enhancing Vehicle Environmental Awareness via Federated Learning and Automatic Labeling
Chih-Yu Lin, Jin-Wei Liang
Vehicle environmental awareness is a crucial issue in improving road safety. Through a variety of sensors and vehicle-to-vehicle communication, vehicles can collect a wealth of data. However, to make these data useful, sensor data must be integrated effectively. This paper focuses on the integration of image data and vehicle-to-vehicle communication data. More specifically, our goal is to identify the locations of vehicles sending messages within images, a challenge termed the vehicle identification problem. In this paper, we employ a supervised learning model to tackle the vehicle identification problem. However, we face two practical issues: first, drivers are typically unwilling to share privacy-sensitive image data, and second, drivers usually do not engage in data labeling. To address these challenges, this paper introduces a comprehensive solution to the vehicle identification problem, which leverages federated learning and automatic labeling techniques in combination with the aforementioned supervised learning model. We have validated the feasibility of our proposed approach through experiments.
Read more8/26/2024

0
DeepSense-V2V: A Vehicle-to-Vehicle Multi-Modal Sensing, Localization, and Communications Dataset
Joao Morais, Gouranga Charan, Nikhil Srinivas, Ahmed Alkhateeb
High data rate and low-latency vehicle-to-vehicle (V2V) communication are essential for future intelligent transport systems to enable coordination, enhance safety, and support distributed computing and intelligence requirements. Developing effective communication strategies, however, demands realistic test scenarios and datasets. This is important at the high-frequency bands where more spectrum is available, yet harvesting this bandwidth is challenged by the need for direction transmission and the sensitivity of signal propagation to blockages. This work presents the first large-scale multi-modal dataset for studying mmWave vehicle-to-vehicle communications. It presents a two-vehicle testbed that comprises data from a 360-degree camera, four radars, four 60 GHz phased arrays, a 3D lidar, and two precise GPSs. The dataset contains vehicles driving during the day and night for 120 km in intercity and rural settings, with speeds up to 100 km per hour. More than one million objects were detected across all images, from trucks to bicycles. This work further includes detailed dataset statistics that prove the coverage of various situations and highlights how this dataset can enable novel machine-learning applications.
Read more6/27/2024
0
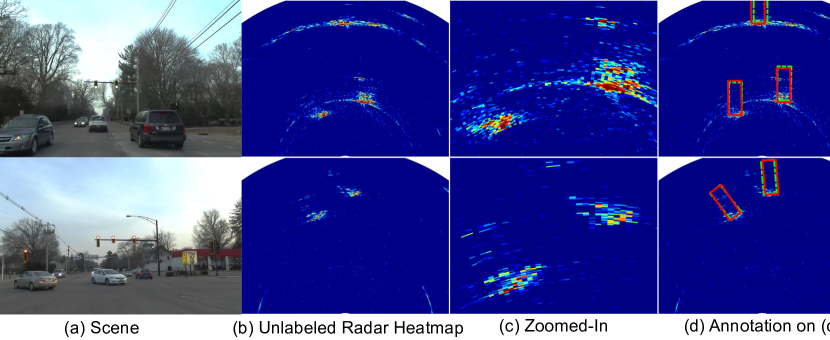
Bootstrapping Autonomous Driving Radars with Self-Supervised Learning
Yiduo Hao, Sohrab Madani, Junfeng Guan, Mohammed Alloulah, Saurabh Gupta, Haitham Hassanieh
The perception of autonomous vehicles using radars has attracted increased research interest due its ability to operate in fog and bad weather. However, training radar models is hindered by the cost and difficulty of annotating large-scale radar data. To overcome this bottleneck, we propose a self-supervised learning framework to leverage the large amount of unlabeled radar data to pre-train radar-only embeddings for self-driving perception tasks. The proposed method combines radar-to-radar and radar-to-vision contrastive losses to learn a general representation from unlabeled radar heatmaps paired with their corresponding camera images. When used for downstream object detection, we demonstrate that the proposed self-supervision framework can improve the accuracy of state-of-the-art supervised baselines by $5.8%$ in mAP. Code is available at url{https://github.com/yiduohao/Radical}.
Read more4/19/2024