Semantic Communication for Cooperative Perception using HARQ

0

Sign in to get full access
Overview
- Cooperative perception enables vehicles to share information and collectively build a more comprehensive understanding of their environment.
- This paper proposes a semantic communication system for cooperative perception using hybrid automatic repeat request (HARQ) to enhance reliability.
- The system leverages end-to-end learning to optimize the communication for semantic information transfer rather than raw data transmission.
Plain English Explanation
In this paper, the researchers explore a way to help self-driving cars and other autonomous vehicles work together more effectively. Cooperative perception allows vehicles to share information with each other, giving them a better overall understanding of their surroundings.
The key idea is to use a technique called "semantic communication" instead of just transmitting raw sensor data. Semantic communication focuses on conveying the meaning or significance of the information, rather than the raw details. This can be more efficient and reliable than traditional data transmission.
To make this semantic communication more robust, the researchers incorporate a method called "hybrid automatic repeat request" (HARQ). HARQ helps ensure the information is received correctly, even if there are errors or interference during transmission.
The system uses end-to-end learning to optimize the communication process for this semantic information transfer, rather than just optimizing for generic data transmission.
Technical Explanation
The paper presents a semantic communication system for cooperative perception among autonomous vehicles that utilizes HARQ to enhance reliability.
The system model consists of a transmitter vehicle that observes its environment and aims to convey the semantic information to a receiver vehicle through a wireless communication link. The transmitter encodes the semantic information into a bitstream, which is then transmitted using HARQ.
HARQ is a hybrid error control coding scheme that combines forward error correction (FEC) with automatic repeat request (ARQ). It allows the receiver to incrementally combine multiple transmissions to recover the original information, improving reliability compared to traditional ARQ or FEC alone.
The researchers leverage end-to-end learning to jointly optimize the semantic encoder, HARQ encoder/decoder, and wireless transmission parameters. This end-to-end optimization aims to maximize the transfer of semantic information rather than just raw data.
Critical Analysis
The paper presents a promising approach to enhancing cooperative perception among autonomous vehicles through semantic communication and HARQ. The end-to-end learning technique used to optimize the system is a notable strength, as it can adaptively learn the optimal communication strategy for the specific task of semantic information transfer.
However, the paper does not provide extensive experimental validation or discussion of potential limitations. For example, the impact of different environmental conditions, vehicle speeds, or sensor modalities on the system's performance is not explored. Additionally, the computational complexity and real-time feasibility of the end-to-end learning approach could be further investigated.
Conclusion
This research proposes an innovative semantic communication system for cooperative perception in autonomous vehicles, leveraging HARQ and end-to-end learning to enhance the reliability and efficiency of information sharing. The core ideas presented have the potential to significantly improve the collaborative abilities of self-driving cars and other autonomous systems operating in complex, dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Semantic Communication for Cooperative Perception using HARQ
Yucheng Sheng, Le Liang, Hao Ye, Shi Jin, Geoffrey Ye Li
Cooperative perception, offering a wider field of view than standalone perception, is becoming increasingly crucial in autonomous driving. This perception is enabled through vehicle-to-vehicle (V2V) communication, allowing connected automated vehicles (CAVs) to exchange sensor data, such as light detection and ranging (LiDAR) point clouds, thereby enhancing the collective understanding of the environment. In this paper, we leverage an importance map to distill critical semantic information, introducing a cooperative perception semantic communication framework that employs intermediate fusion. To counter the challenges posed by time-varying multipath fading, our approach incorporates the use of orthogonal frequency-division multiplexing (OFDM) along with channel estimation and equalization strategies. Furthermore, recognizing the necessity for reliable transmission, especially in the low SNR scenarios, we introduce a novel semantic error detection method that is integrated with our semantic communication framework in the spirit of hybrid automatic repeated request (HARQ). Simulation results show that our model surpasses the traditional separate source-channel coding methods in perception performance, both with and without HARQ. Additionally, in terms of throughput, our proposed HARQ schemes demonstrate superior efficiency to the conventional coding approaches.
Read more9/17/2024

0
Enhanced Cooperative Perception for Autonomous Vehicles Using Imperfect Communication
Ahmad Sarlak, Hazim Alzorgan, Sayed Pedram Haeri Boroujeni, Abolfazl Razi, Rahul Amin
Sharing and joint processing of camera feeds and sensor measurements, known as Cooperative Perception (CP), has emerged as a new technique to achieve higher perception qualities. CP can enhance the safety of Autonomous Vehicles (AVs) where their individual visual perception quality is compromised by adverse weather conditions (haze as foggy weather), low illumination, winding roads, and crowded traffic. To cover the limitations of former methods, in this paper, we propose a novel approach to realize an optimized CP under constrained communications. At the core of our approach is recruiting the best helper from the available list of front vehicles to augment the visual range and enhance the Object Detection (OD) accuracy of the ego vehicle. In this two-step process, we first select the helper vehicles that contribute the most to CP based on their visual range and lowest motion blur. Next, we implement a radio block optimization among the candidate vehicles to further improve communication efficiency. We specifically focus on pedestrian detection as an exemplary scenario. To validate our approach, we used the CARLA simulator to create a dataset of annotated videos for different driving scenarios where pedestrian detection is challenging for an AV with compromised vision. Our results demonstrate the efficacy of our two-step optimization process in improving the overall performance of cooperative perception in challenging scenarios, substantially improving driving safety under adverse conditions. Finally, we note that the networking assumptions are adopted from LTE Release 14 Mode 4 side-link communication, commonly used for Vehicle-to-Vehicle (V2V) communication. Nonetheless, our method is flexible and applicable to arbitrary V2V communications.
Read more4/15/2024

0
Leveraging Temporal Contexts to Enhance Vehicle-Infrastructure Cooperative Perception
Jiaru Zhong, Haibao Yu, Tianyi Zhu, Jiahui Xu, Wenxian Yang, Zaiqing Nie, Chao Sun
Infrastructure sensors installed at elevated positions offer a broader perception range and encounter fewer occlusions. Integrating both infrastructure and ego-vehicle data through V2X communication, known as vehicle-infrastructure cooperation, has shown considerable advantages in enhancing perception capabilities and addressing corner cases encountered in single-vehicle autonomous driving. However, cooperative perception still faces numerous challenges, including limited communication bandwidth and practical communication interruptions. In this paper, we propose CTCE, a novel framework for cooperative 3D object detection. This framework transmits queries with temporal contexts enhancement, effectively balancing transmission efficiency and performance to accommodate real-world communication conditions. Additionally, we propose a temporal-guided fusion module to further improve performance. The roadside temporal enhancement and vehicle-side spatial-temporal fusion together constitute a multi-level temporal contexts integration mechanism, fully leveraging temporal information to enhance performance. Furthermore, a motion-aware reconstruction module is introduced to recover lost roadside queries due to communication interruptions. Experimental results on V2X-Seq and V2X-Sim datasets demonstrate that CTCE outperforms the baseline QUEST, achieving improvements of 3.8% and 1.3% in mAP, respectively. Experiments under communication interruption conditions validate CTCE's robustness to communication interruptions.
Read more8/21/2024
0
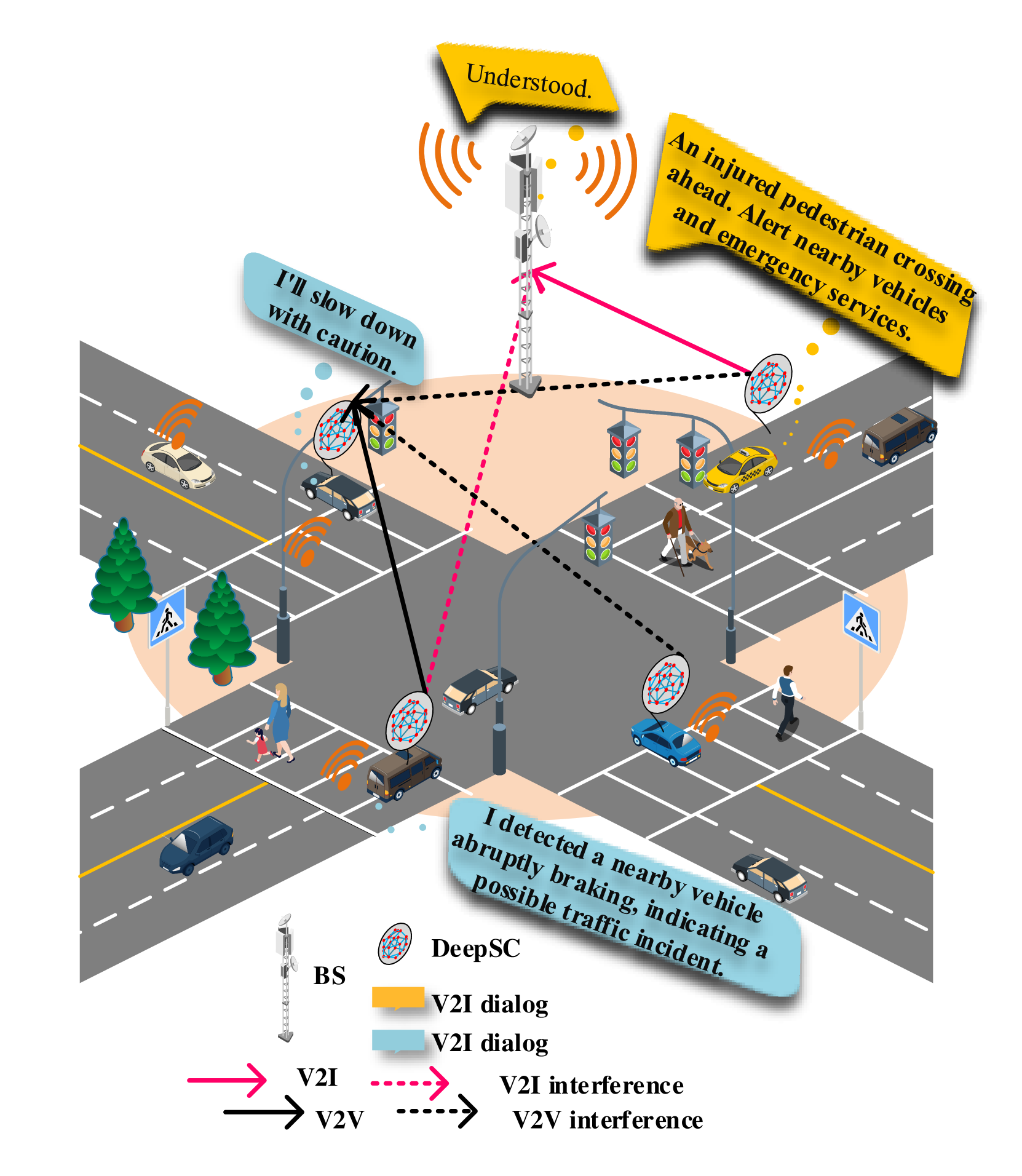
Semantic-Aware Spectrum Sharing in Internet of Vehicles Based on Deep Reinforcement Learning
Zhiyu Shao, Qiong Wu, Pingyi Fan, Nan Cheng, Wen Chen, Jiangzhou Wang, Khaled B. Letaief
This work aims to investigate semantic communication in high-speed mobile Internet of vehicles (IoV) environments, with a focus on the spectrum sharing between vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications. We specifically address spectrum scarcity and network traffic and then propose a semantic-aware spectrum sharing algorithm (SSS) based on the deep reinforcement learning (DRL) soft actor-critic (SAC) approach. Firstly, we delve into the extraction of semantic information. Secondly, we redefine metrics for semantic information in V2V and V2I spectrum sharing in IoV environments, introducing high-speed semantic spectrum efficiency (HSSE) and semantic transmission rate (HSR). Finally, we employ the SAC algorithm for decision optimization in V2V and V2I spectrum sharing based on semantic information. This optimization encompasses the optimal link of V2V and V2I sharing strategies, the transmission power for vehicles sending semantic information and the length of transmitted semantic symbols, aiming at maximizing HSSE of V2I and enhancing success rate of effective semantic information transmission (SRS) of V2V. Experimental results demonstrate that the SSS algorithm outperforms other baseline algorithms, including other traditional-communication-based spectrum sharing algorithms and spectrum sharing algorithm using other reinforcement learning approaches. The SSS algorithm exhibits a 15% increase in HSSE and approximately a 7% increase in SRS.
Read more6/18/2024