Semi-Autonomous Mobile Search and Rescue Robot for Radiation Disaster Scenarios
2406.14385
0
0

Abstract
This paper describes a novel semi-autonomous mobile robot system designed to assist search and rescue (SAR) first responders in disaster scenarios. While robots offer significant potential in SAR missions, current solutions are limited in their ability to handle a diverse range of tasks. This gap is addressed by presenting a system capable of (1) autonomous navigation and mapping, allowing the robot to autonomously explore and map areas affected by catastrophic events, (2) radiation mapping, enabling the system to triangulate a radiation map from discrete radiation measurements to aid in identifying hazardous areas, (3) semi-autonomous substance sampling, allowing the robot to collect samples of suspicious substances and analyze them onboard with immediate classification, and (4) valve manipulation, enabling teleoperated closing of valves that control hazardous material flow. This semi-autonomous approach balances human control over critical tasks like substance sampling with efficient robot navigation in low-risk areas. The system is evaluated during three trials that simulate possible disaster scenarios, two of which have been recorded during the European Robotics Hackathon (EnRicH). Furthermore, we provide recorded sensor data as well as the implemented software system as supplemental material through a GitHub repository: https://github.com/TW-Robotics/search-and-rescue-robot-IROS2024.
Create account to get full access
Overview
- This paper presents the development of a semi-autonomous mobile search and rescue robot designed for radiation disaster scenarios.
- The robot is equipped with various sensors and capabilities to navigate hazardous environments, locate victims, and provide real-time data to rescue teams.
- The research aims to improve the efficiency and safety of disaster response operations in radiation-contaminated areas.
Plain English Explanation
The paper describes the creation of a semi-autonomous robot that can be used for search and rescue operations in areas affected by radiation disasters. The robot has advanced sensors and features that allow it to navigate dangerous environments, find people who need help, and send important information back to the rescue teams. The goal of this research is to make disaster response efforts in radioactive zones safer and more effective.
The robot is designed to operate in a semi-autonomous mode, meaning it can perform many tasks on its own but still requires some human oversight and control. This hybrid approach combines the strengths of both autonomous and manual systems to optimize the robot's performance and reliability in challenging real-world conditions.
Technical Explanation
The paper details the design and development of a semi-autonomous mobile robot for search and rescue operations in radiation disaster scenarios. The robot is equipped with a range of sensors, including a radiation sensor, thermal cameras, and LIDAR, which allow it to navigate hazardous environments, locate victims, and map radiation levels. The robot's semi-autonomous nature enables a combination of autonomous and manual control, providing the flexibility to adapt to dynamic conditions.
The researchers describe the robot's architecture, including its navigation, mapping, and victim identification capabilities. They also present the results of field tests and simulations that demonstrate the robot's effectiveness in locating and assisting victims in radiation-contaminated areas. The experiments evaluate the robot's performance in various scenarios, providing insights into its strengths and limitations.
Critical Analysis
The paper presents a well-designed and comprehensive approach to developing a semi-autonomous robot for radiation disaster response. The researchers have thoughtfully addressed key challenges, such as navigating in hazardous environments and leveraging both autonomous and manual control modes.
However, the paper acknowledges several limitations and areas for further research. For example, the robot's power autonomy and endurance in prolonged missions could be improved, and the integration of additional sensors or communication capabilities may enhance its effectiveness. Additionally, the researchers note the need for more extensive field testing and validation to ensure the robot's reliability and robustness in real-world disaster scenarios.
While the presented research represents a significant step forward in disaster robotics, ongoing development and refinement will be necessary to fully realize the potential of this technology and address the complex challenges of radiation disaster response.
Conclusion
This paper introduces a semi-autonomous mobile robot designed for search and rescue operations in radiation disaster scenarios. The robot's advanced sensors and hybrid control system enable it to navigate hazardous environments, locate victims, and provide real-time data to rescue teams, thereby enhancing the efficiency and safety of disaster response efforts.
The researchers have made substantial progress in developing a versatile and capable disaster response platform. However, continued research and refinement are necessary to address the inherent challenges and limitations of this technology. As this field of robotics continues to evolve, the insights and innovations presented in this paper contribute valuable knowledge and pave the way for further advancements in autonomous systems for disaster management.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Autonomous Robot for Disaster Mapping and Victim Localization
Michael Potter, Rahil Bhowal, Richard Zhao, Anuj Patel, Jingming Cheng
0
0
In response to the critical need for effective reconnaissance in disaster scenarios, this research article presents the design and implementation of a complete autonomous robot system using the Turtlebot3 with Robotic Operating System (ROS) Noetic. Upon deployment in closed, initially unknown environments, the system aims to generate a comprehensive map and identify any present 'victims' using AprilTags as stand-ins. We discuss our solution for search and rescue missions, while additionally exploring more advanced algorithms to improve search and rescue functionalities. We introduce a Cubature Kalman Filter to help reduce the mean squared error [m] for AprilTag localization and an information-theoretic exploration algorithm to expedite exploration in unknown environments. Just like turtles, our system takes it slow and steady, but when it's time to save the day, it moves at ninja-like speed! Despite Donatello's shell, he's no slowpoke - he zips through obstacles with the agility of a teenage mutant ninja turtle. So, hang on tight to your shells and get ready for a whirlwind of reconnaissance! Full pipeline code https://github.com/rzhao5659/MRProject/tree/main Exploration code https://github.com/rzhao5659/MRProject/tree/main
4/23/2024
📶
Research on an Autonomous UAV Search and Rescue System Based on the Improved
Haobin Chen, Junyu Tao, Bize Zhou, Xiaoyan Liu
0
0
The demand is to solve the issue of UAV (unmanned aerial vehicle) operating autonomously and implementing practical functions such as search and rescue in complex unknown environments. This paper proposes an autonomous search and rescue UAV system based on an EGO-Planner algorithm, which is improved by innovative UAV body application and takes the methods of inverse motor backstepping to enhance the overall flight efficiency of the UAV and miniaturization of the whole machine. At the same time, the system introduced the EGO-Planner planning tool, which is optimized by a bidirectional A* algorithm along with an object detection algorithm. It solves the issue of intelligent obstacle avoidance and search and rescue. Through the simulation and field verification work, and compared with traditional algorithms, this method shows more efficiency and reliability in the task. In addition, due to the existing algorithm's improved robustness, this application shows good prospection.
6/10/2024
Modular, Resilient, and Scalable System Design Approaches -- Lessons learned in the years after DARPA Subterranean Challenge
Prasanna Sriganesh, James Maier, Adam Johnson, Burhanuddin Shirose, Rohan Chandrasekar, Charles Noren, Joshua Spisak, Ryan Darnley, Bhaskar Vundurthy, Matthew Travers
0
0
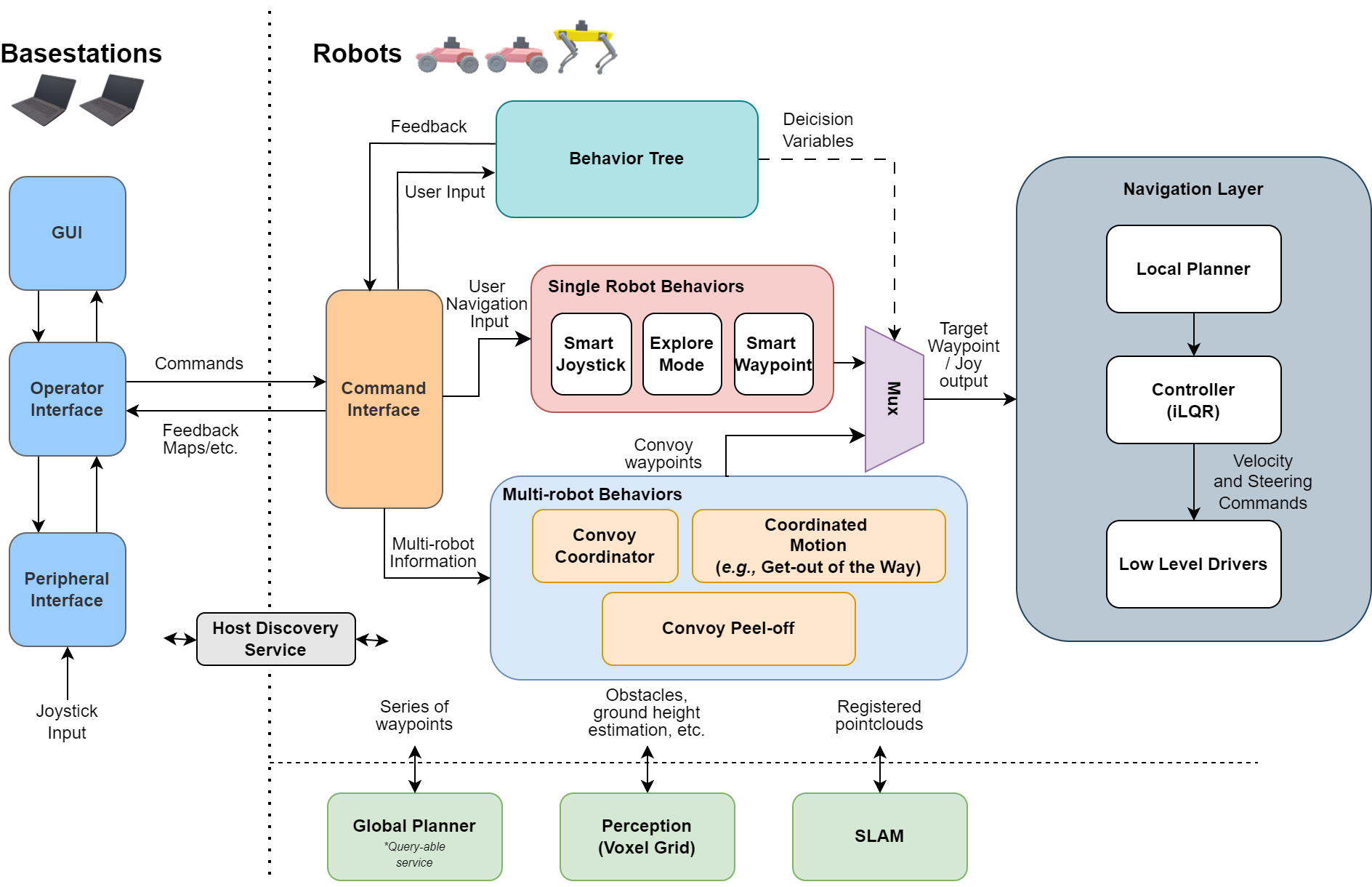
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team's participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy (sliding mode autonomy). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
4/30/2024
🛠️
Semi-autonomous Robotic Disassembly Enhanced by Mixed Reality
Alireza Rastegarpanah, Cesar Alan Contreras, Rustam Stolkin
0
0
In this study, we introduce SARDiM, a modular semi-autonomous platform enhanced with mixed reality for industrial disassembly tasks. Through a case study focused on EV battery disassembly, SARDiM integrates Mixed Reality, object segmentation, teleoperation, force feedback, and variable autonomy. Utilising the ROS, Unity, and MATLAB platforms, alongside a joint impedance controller, SARDiM facilitates teleoperated disassembly. The approach combines FastSAM for real-time object segmentation, generating data which is subsequently processed through a cluster analysis algorithm to determine the centroid and orientation of the components, categorizing them by size and disassembly priority. This data guides the MoveIt platform in trajectory planning for the Franka Robot arm. SARDiM provides the capability to switch between two teleoperation modes: manual and semi-autonomous with variable autonomy. Each was evaluated using four different Interface Methods (IM): direct view, monitor feed, mixed reality with monitor feed, and point cloud mixed reality. Evaluations across the eight IMs demonstrated a 40.61% decrease in joint limit violations using Mode 2. Moreover, Mode 2-IM4 outperformed Mode 1-IM1 by achieving a 2.33%-time reduction while considerably increasing safety, making it optimal for operating in hazardous environments at a safe distance, with the same ease of use as teleoperation with a direct view of the environment.
5/7/2024