Modular, Resilient, and Scalable System Design Approaches -- Lessons learned in the years after DARPA Subterranean Challenge
2404.17759
0
0
Abstract
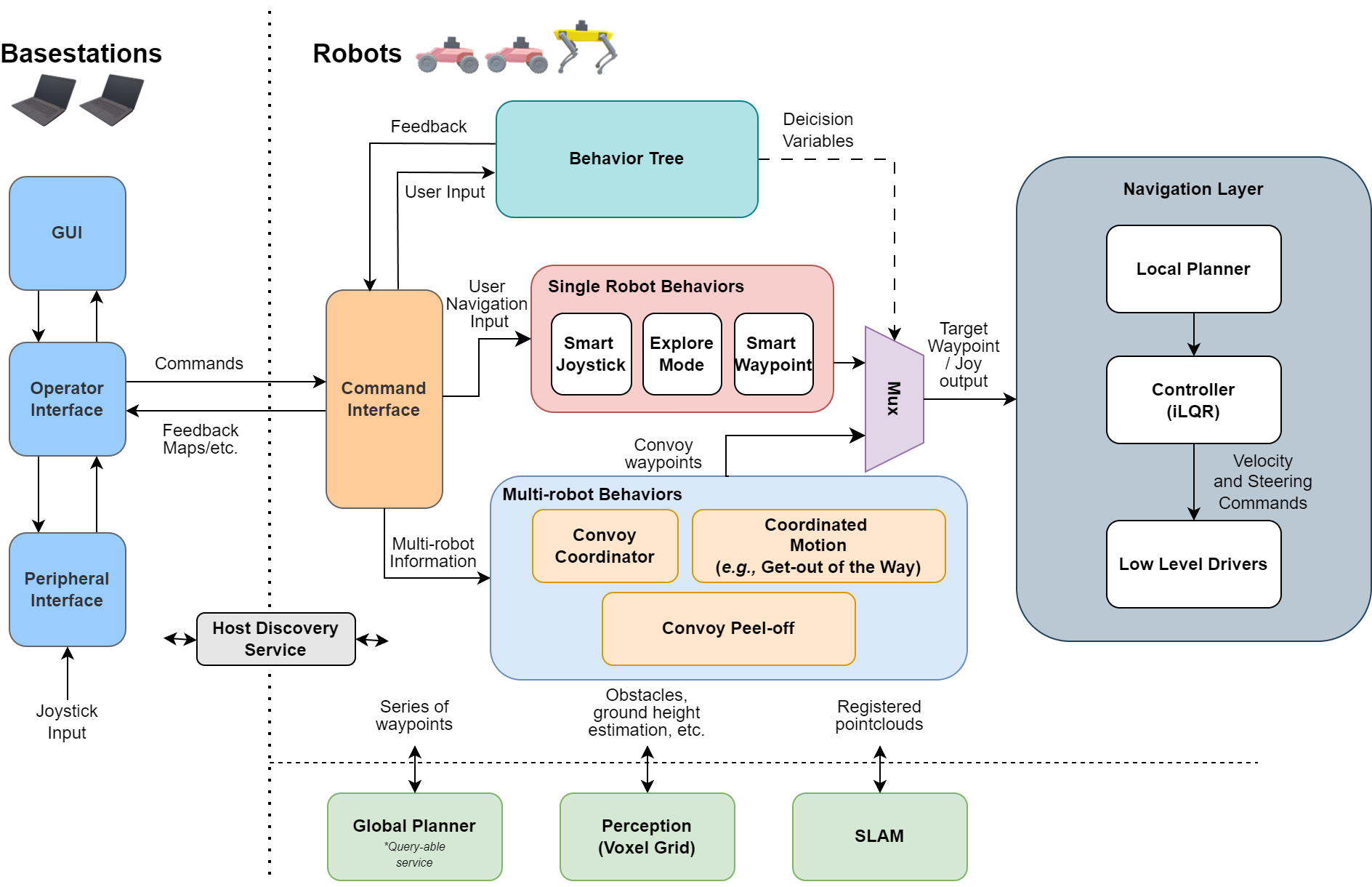
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team's participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy (sliding mode autonomy). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
Create account to get full access
Overview
- Discusses modular, resilient, and scalable system design approaches for field robotics, drawing lessons from the DARPA Subterranean Challenge
- Covers key challenges and design principles for building robust, adaptable, and scalable robotic systems
- Highlights the importance of modularity, redundancy, and distributed intelligence in enabling resilient and high-performance field robotics
Plain English Explanation
This paper explores the design of advanced robotic systems that can operate reliably and effectively in complex, unpredictable environments. The researchers draw insights from their experiences participating in the DARPA Subterranean Challenge, a competition that pushed the boundaries of robot autonomy and multi-robot coordination.
The key ideas revolve around making robotic systems more modular, resilient, and scalable. Modularity allows the systems to be easily reconfigured and adapted to different tasks and environments. Resilience means the systems can withstand failures and continue operating effectively. Scalability allows the systems to grow in capability by adding more robots or sensors as needed.
Some of the crucial design principles highlighted include:
- Distributed Intelligence: Rather than relying on a central controller, the robots have distributed decision-making capabilities, making the system more fault-tolerant.
- Redundancy and Backup Systems: Critical components have backup systems or redundant capabilities to maintain operation despite individual failures.
- Adaptability and Self-Healing: The systems can adapt to changing conditions and even repair themselves to some degree.
These design approaches aim to create robotic systems that are robust, flexible, and scalable - able to handle the unpredictable challenges of real-world field operations, from exploration to disaster response. The lessons learned can inform the development of the next generation of advanced field robotics and multi-robot systems.
Technical Explanation
The paper discusses key design principles and lessons learned in developing modular, resilient, and scalable robotic systems for field operations, drawing from the authors' experiences in the DARPA Subterranean Challenge.
A central focus is on enabling distributed intelligence and redundancy to create robust, fault-tolerant systems. Rather than relying on a centralized control architecture, the robots have distributed decision-making capabilities, allowing the system to continue functioning even if individual components fail. Critical subsystems also have backup systems or redundant capabilities to maintain operation.
The researchers emphasize the importance of adaptability and self-healing mechanisms. The robotic systems must be able to adapt to changing environmental conditions and even repair themselves to some degree. This is achieved through modular hardware and software designs that enable reconfiguration and on-the-fly adaptation.
Additionally, the authors highlight the value of scalability, which allows the robotic systems to grow in capability by adding more robots, sensors, or other components as needed. This enables the systems to tackle increasingly complex challenges and scale up to larger-scale deployments.
The insights gained from the DARPA Subterranean Challenge informed the development of novel robotic hardware and control architectures, such as the BEATLE self-reconfigurable aerial robot and distributed artificial intelligence techniques for multi-robot coordination and decision-making.
Critical Analysis
The paper provides a thoughtful and well-articulated discussion of the design principles and lessons learned in developing resilient and scalable robotic systems for field operations. The authors' experiences in the DARPA Subterranean Challenge, a challenging real-world test of robot autonomy, lend credibility to their insights.
One potential limitation of the research is the focus on a specific competition scenario, which may not fully capture the breadth of challenges faced in broader field robotics applications. While the design principles discussed are likely applicable to a range of scenarios, further validation in diverse real-world settings would strengthen the generalizability of the findings.
Additionally, the paper does not delve deeply into the implementation details or technical tradeoffs of the proposed design approaches. A more in-depth exploration of the architectural choices, algorithms, and experimental results would provide a richer understanding for readers interested in replicating or building upon this work.
Overall, the paper offers valuable guidance for researchers and engineers working on advanced field robotics and multi-robot systems. The emphasis on modularity, redundancy, and distributed intelligence lays a strong foundation for developing robust, adaptable, and scalable robotic platforms capable of operating in complex, unpredictable environments.
Conclusion
This paper provides insightful design principles and lessons learned for building modular, resilient, and scalable robotic systems capable of operating effectively in challenging field environments. Drawing from the authors' experiences in the DARPA Subterranean Challenge, the research highlights the importance of distributed intelligence, redundancy, adaptability, and scalability in creating robust and high-performing field robotics platforms.
The proposed design approaches have the potential to significantly advance the state-of-the-art in multi-robot systems and unconventional field robotics, enabling the development of versatile, self-healing, and scalable robotic solutions for a wide range of real-world applications, from disaster response to exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Semi-Autonomous Mobile Search and Rescue Robot for Radiation Disaster Scenarios
Simon Schwaiger, Lucas Muster, Georg Novotny, Michael Schebek, Wilfried Wober, Stefan Thalhammer, Christoph Bohm
0
0
This paper describes a novel semi-autonomous mobile robot system designed to assist search and rescue (SAR) first responders in disaster scenarios. While robots offer significant potential in SAR missions, current solutions are limited in their ability to handle a diverse range of tasks. This gap is addressed by presenting a system capable of (1) autonomous navigation and mapping, allowing the robot to autonomously explore and map areas affected by catastrophic events, (2) radiation mapping, enabling the system to triangulate a radiation map from discrete radiation measurements to aid in identifying hazardous areas, (3) semi-autonomous substance sampling, allowing the robot to collect samples of suspicious substances and analyze them onboard with immediate classification, and (4) valve manipulation, enabling teleoperated closing of valves that control hazardous material flow. This semi-autonomous approach balances human control over critical tasks like substance sampling with efficient robot navigation in low-risk areas. The system is evaluated during three trials that simulate possible disaster scenarios, two of which have been recorded during the European Robotics Hackathon (EnRicH). Furthermore, we provide recorded sensor data as well as the implemented software system as supplemental material through a GitHub repository: https://github.com/TW-Robotics/search-and-rescue-robot-IROS2024.
6/21/2024

Towards Physically Talented Aerial Robots with Tactically Smart Swarm Behavior thereof: An Efficient Co-design Approach
Prajit KrisshnaKumar, Steve Paul, Hemanth Manjunatha, Mary Corra, Ehsan Esfahani, Souma Chowdhury
0
0
The collective performance or capacity of collaborative autonomous systems such as a swarm of robots is jointly influenced by the morphology and the behavior of individual systems in that collective. In that context, this paper explores how morphology impacts the learned tactical behavior of unmanned aerial/ground robots performing reconnaissance and search & rescue. This is achieved by presenting a computationally efficient framework to solve this otherwise challenging problem of jointly optimizing the morphology and tactical behavior of swarm robots. Key novel developments to this end include the use of physical talent metrics and modification of graph reinforcement learning architectures to allow joint learning of the swarm tactical policy and the talent metrics (search speed, flight range, and cruising speed) that constrain mobility and object/victim search capabilities of the aerial robots executing these tactics. Implementation of this co-design approach is supported by advancements to an open-source Pybullet-based swarm simulator that allows the use of variable aerial asset capabilities. The results of the co-design are observed to outperform those of tactics learning with a fixed Pareto design, when compared in terms of mission performance metrics. Significant differences in morphology and learned behavior are also observed by comparing the baseline design and the co-design outcomes.
6/26/2024
📊
Analysis of a Modular Autonomous Driving Architecture: The Top Submission to CARLA Leaderboard 2.0 Challenge
Weize Zhang, Mohammed Elmahgiubi, Kasra Rezaee, Behzad Khamidehi, Hamidreza Mirkhani, Fazel Arasteh, Chunlin Li, Muhammad Ahsan Kaleem, Eduardo R. Corral-Soto, Dhruv Sharma, Tongtong Cao
0
0
In this paper we present the architecture of the Kyber-E2E submission to the map track of CARLA Leaderboard 2.0 Autonomous Driving (AD) challenge 2023, which achieved first place. We employed a modular architecture for our solution consists of five main components: sensing, localization, perception, tracking/prediction, and planning/control. Our solution leverages state-of-the-art language-assisted perception models to help our planner perform more reliably in highly challenging traffic scenarios. We use open-source driving datasets in conjunction with Inverse Reinforcement Learning (IRL) to enhance the performance of our motion planner. We provide insight into our design choices and trade-offs made to achieve this solution. We also explore the impact of each component in the overall performance of our solution, with the intent of providing a guideline where allocation of resources can have the greatest impact.
5/3/2024
Hierarchically Decentralized Heterogeneous Multi-Robot Task Allocation System
Sujeet Kashid, Ashwin D. Kumat
0
0
With plans to send humans to the Moon and further, the supply of resources like oxygen, water, fuel, etc., can be satiated by performing In-Situ Resource Utilization (ISRU), where resources from the extra-terrestrial body are extracted to be utilized. These ISRU missions can be carried out by a Multi-Robot System (MRS). In this research, a high-level auction- based Multi-Robot Task Allocation (MRTA) system is developed for coordinating tasks amongst multiple robots with distinct capabilities. A hierarchical decentralized coordination architecture is implemented in this research to allocate the tasks amongst the robots for achieving intentional cooperation in the Multi-Robot System (MRS). 3 different policies are formulated that govern how robots should act in the multiple auction situations of the auction-based task allocation system proposed in this research, and their performance is evaluated in a 2D simulation called pyrobosim using ROS2. The decentralized coordination architecture and the auction-based MRTA make the MRS highly scalable, reliable, flexible, and robust.
5/7/2024