Sim-Grasp: Learning 6-DOF Grasp Policies for Cluttered Environments Using a Synthetic Benchmark

0

Sign in to get full access
Overview
• This paper introduces a new technique called Sim-Grasp for learning 6-degree-of-freedom (6-DOF) grasp policies for robotic hands in cluttered environments using a synthetic benchmark. • The key idea is to train a neural network-based grasp policy in simulation that can then be applied to real-world robotic grasping tasks. • The authors create a large-scale synthetic dataset of realistic 3D object meshes and challenging cluttered scenes to train and evaluate their approach.
Plain English Explanation
Robotic hands with many degrees of freedom (joints that can move in different directions) have the potential to grasp a wide variety of objects, even in messy, cluttered environments. However, it can be challenging to program these complex hands to perform reliable grasps. The researchers behind this paper developed a new technique called Sim-Grasp to address this problem.
The core idea is to train a machine learning model in a simulated environment to learn how to grasp different objects, even when they are piled together. They created a large dataset of virtual 3D object models and scenes to train the model. This allows the model to learn general grasping strategies that can then be applied to real-world robotic hands, without the need for extensive real-world training.
The key innovation is using this synthetic training data to learn a neural network-based policy that can control the 6 degrees of freedom (position and orientation) of a robotic hand to reliably grasp objects, even in messy, cluttered environments. This is a significant advance over previous approaches that could only handle simpler grasping scenarios.
Technical Explanation
The Sim-Grasp approach involves training a neural network-based policy that can control a simulated 6-DOF robotic hand to grasp objects effectively, even when they are clustered together. The authors created a large-scale synthetic dataset of 3D object meshes and challenging cluttered scenes to train and evaluate their model.
The key components of their approach include:
- A neural network policy that takes as input the current state of the robotic hand and the 3D geometry of the cluttered scene, and outputs the desired 6-DOF motion of the hand to grasp an object.
- A differentiable physics simulator that can accurately model the dynamics of the robotic hand interacting with the objects, allowing the policy to be trained end-to-end.
- A diverse dataset of synthetic 3D object meshes and cluttered scenes to train the policy on a wide range of grasping scenarios.
Through extensive experiments, the authors demonstrate that the Sim-Grasp policy learned in simulation can be effectively transferred to real-world robotic grasping tasks, outperforming previous 6-DOF grasping approaches that relied on simplified assumptions or limited training data.
Critical Analysis
The Sim-Grasp approach represents a significant advance in robotic grasping capabilities, but there are a few important caveats to consider:
- The reliance on synthetic training data means the policy may not generalize perfectly to real-world scenes, which can have subtleties that are difficult to capture in simulation. Further domain adaptation techniques may be needed to bridge this gap.
- The policy is trained to optimize for successful grasps, but does not explicitly consider other important factors like energy efficiency, grasp stability, or object safety. Incorporating these additional objectives could lead to more well-rounded grasping behaviors.
- The paper focuses on cluttered tabletop scenes, but real-world robotic applications may involve more complex environments, such as shelves or bins, which could require additional modeling and training.
Overall, the Sim-Grasp approach is a promising step forward in developing flexible, high-DOF robotic grasping capabilities, but continued research is needed to fully realize the potential of this technology.
Conclusion
The Sim-Grasp paper presents a novel technique for learning 6-DOF grasp policies for robotic hands in cluttered environments using a large-scale synthetic benchmark. By training a neural network-based policy in simulation, the researchers were able to develop a grasping system that can effectively transfer to real-world robotic applications, outperforming previous approaches.
This work highlights the power of leveraging simulated training data to tackle complex robotic manipulation tasks, and demonstrates the potential for advanced machine learning techniques to unlock new levels of grasping performance. As the authors note, continued research is needed to further refine and expand the capabilities of this approach, but Sim-Grasp represents an important step forward in the field of robotic grasping.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Sim-Grasp: Learning 6-DOF Grasp Policies for Cluttered Environments Using a Synthetic Benchmark
Juncheng Li, David J. Cappelleri
In this paper, we present Sim-Grasp, a robust 6-DOF two-finger grasping system that integrates advanced language models for enhanced object manipulation in cluttered environments. We introduce the Sim-Grasp-Dataset, which includes 1,550 objects across 500 scenarios with 7.9 million annotated labels, and develop Sim-GraspNet to generate grasp poses from point clouds. The Sim-Grasp-Polices achieve grasping success rates of 97.14% for single objects and 87.43% and 83.33% for mixed clutter scenarios of Levels 1-2 and Levels 3-4 objects, respectively. By incorporating language models for target identification through text and box prompts, Sim-Grasp enables both object-agnostic and target picking, pushing the boundaries of intelligent robotic systems.
Read more7/18/2024

0
Multi-fingered Robotic Hand Grasping in Cluttered Environments through Hand-object Contact Semantic Mapping
Lei Zhang, Kaixin Bai, Guowen Huang, Zhaopeng Chen, Jianwei Zhang
The integration of optimization method and generative models has significantly advanced dexterous manipulation techniques for five-fingered hand grasping. Yet, the application of these techniques in cluttered environments is a relatively unexplored area. To address this research gap, we have developed a novel method for generating five-fingered hand grasp samples in cluttered settings. This method emphasizes simulated grasp quality and the nuanced interaction between the hand and surrounding objects. A key aspect of our approach is our data generation method, capable of estimating contact spatial and semantic representations and affordance grasps based on object affordance information. Furthermore, our Contact Semantic Conditional Variational Autoencoder (CoSe-CVAE) network is adept at creating comprehensive contact maps from point clouds, incorporating both spatial and semantic data. We introduce a unique grasp detection technique that efficiently formulates mechanical hand grasp poses from these maps. Additionally, our evaluation model is designed to assess grasp quality and collision probability, significantly improving the practicality of five-fingered hand grasping in complex scenarios. Our data generation method outperforms previous datasets in grasp diversity, scene diversity, modality diversity. Our grasp generation method has demonstrated remarkable success, outperforming established baselines with 81.0% average success rate in real-world single-object grasping and 75.3% success rate in multi-object grasping. The dataset and supplementary materials can be found at https://sites.google.com/view/ffh-clutteredgrasping, and we will release the code upon publication.
Read more4/16/2024

0
Learning Any-View 6DoF Robotic Grasping in Cluttered Scenes via Neural Surface Rendering
Snehal Jauhri, Ishikaa Lunawat, Georgia Chalvatzaki
A significant challenge for real-world robotic manipulation is the effective 6DoF grasping of objects in cluttered scenes from any single viewpoint without the need for additional scene exploration. This work reinterprets grasping as rendering and introduces NeuGraspNet, a novel method for 6DoF grasp detection that leverages advances in neural volumetric representations and surface rendering. It encodes the interaction between a robot's end-effector and an object's surface by jointly learning to render the local object surface and learning grasping functions in a shared feature space. The approach uses global (scene-level) features for grasp generation and local (grasp-level) neural surface features for grasp evaluation. This enables effective, fully implicit 6DoF grasp quality prediction, even in partially observed scenes. NeuGraspNet operates on random viewpoints, common in mobile manipulation scenarios, and outperforms existing implicit and semi-implicit grasping methods. The real-world applicability of the method has been demonstrated with a mobile manipulator robot, grasping in open, cluttered spaces. Project website at https://sites.google.com/view/neugraspnet
Read more5/30/2024
0
Learning Cross-hand Policies for High-DOF Reaching and Grasping
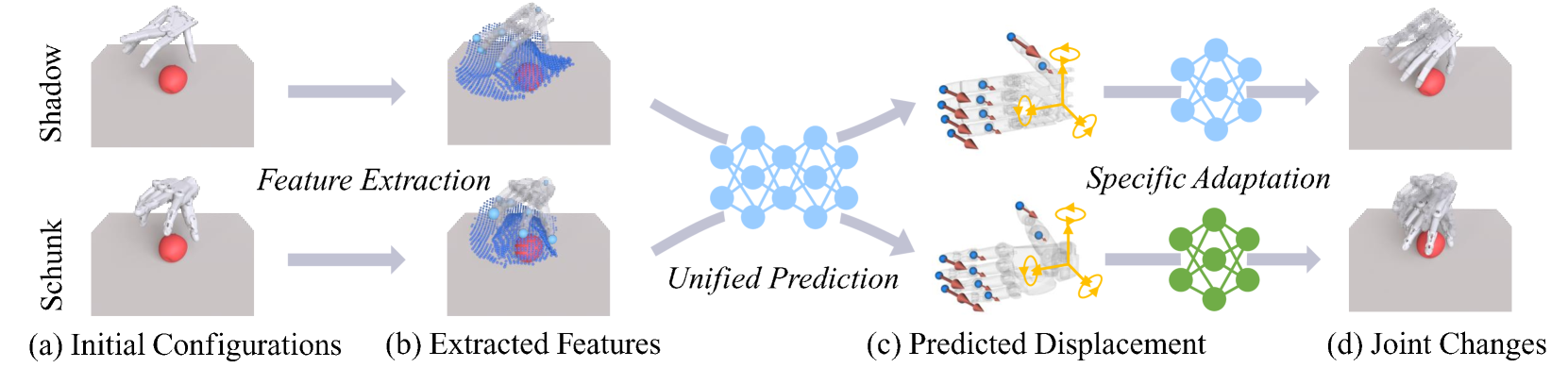
Qijin She, Shishun Zhang, Yunfan Ye, Ruizhen Hu, Kai Xu
Reaching-and-grasping is a fundamental skill for robotic manipulation, but existing methods usually train models on a specific gripper and cannot be reused on another gripper. In this paper, we propose a novel method that can learn a unified policy model that can be easily transferred to different dexterous grippers. Our method consists of two stages: a gripper-agnostic policy model that predicts the displacements of pre-defined key points on the gripper, and a gripper-specific adaptation model that translates these displacements into adjustments for controlling the grippers' joints. The gripper state and interactions with objects are captured at the finger level using robust geometric representations, integrated with a transformer-based network to address variations in gripper morphology and geometry. In the experiments, we evaluate our method on several dexterous grippers and diverse objects, and the result shows that our method significantly outperforms the baseline methods. Pioneering the transfer of grasp policies across dexterous grippers, our method effectively demonstrates its potential for learning generalizable and transferable manipulation skills for various robotic hands.
Read more7/16/2024