Soft Two-degree-of-freedom Dielectric Elastomer Position Sensor Exhibiting Linear Behavior

0

Sign in to get full access
Overview
- This paper presents a soft two-degree-of-freedom (2DOF) dielectric elastomer position sensor that exhibits linear behavior.
- Dielectric elastomer sensors can be used to measure position, force, and other physical quantities in soft robotic and wearable applications.
- The key innovation of this work is the design of a 2DOF sensor that provides linear position feedback, which is important for precise control and integration with other systems.
Plain English Explanation
The paper describes a new type of sensor that can measure the position of a soft, flexible object in two different directions. This sensor is made from a special material called a dielectric elastomer, which changes its electrical properties when it is stretched or deformed. By carefully designing the shape and structure of the sensor, the researchers were able to make the sensor's output change in a linear, or straight-line, fashion as the object moves.
This linear response is important because it makes the sensor easier to use and integrate with other systems, such as robots or wearable devices. Instead of having to deal with a complex, nonlinear relationship between the sensor's output and the object's position, engineers can simply use the linear relationship to precisely control the position of the object.
The ability to measure position in two different directions, rather than just one, also makes this sensor more versatile and useful for a wider range of applications. For example, it could be used to track the movement of a person's hand or arm in a wearable device, or to control the motion of a robotic limb.
Overall, this new sensor design represents an important advance in the field of soft, flexible sensors that can be seamlessly integrated into a variety of robotic and wearable systems.
Technical Explanation
The key innovation presented in this paper is the design of a soft two-degree-of-freedom (2DOF) dielectric elastomer position sensor that exhibits linear behavior. Dielectric elastomer sensors are a class of soft, flexible sensors that can be used to measure a variety of physical quantities, such as position, force, and deformation.
The researchers designed the sensor using a multilayer structure, with a dielectric elastomer sandwiched between two compliant electrodes. By carefully shaping the electrodes and optimizing the sensor's geometry, they were able to achieve a linear relationship between the sensor's capacitance and the position of the object being measured.
The sensor can measure position in two independent directions, which is important for applications such as wearable devices and soft robotics. This 2DOF capability allows the sensor to track the movement and orientation of an object more accurately than a single-axis sensor.
The researchers tested the sensor's performance through a series of experiments, including measuring its linearity, sensitivity, and repeatability. They found that the sensor exhibited a high degree of linearity, with a maximum nonlinearity error of less than 3% over its full range of motion.
The researchers also demonstrated the sensor's ability to estimate ground reaction forces in a soft robotic application, showing its potential for use in a variety of high-frequency sensing applications.
Critical Analysis
The researchers have presented a well-designed and thoroughly tested soft 2DOF dielectric elastomer position sensor. The key strengths of this work are the linear response, the 2DOF capability, and the demonstrated performance in terms of linearity, sensitivity, and repeatability.
However, the paper does not address some potential limitations or areas for further research. For example, the sensor's performance under dynamic loading conditions or in the presence of environmental factors like temperature and humidity is not discussed. Additionally, the scalability of the sensor design and the potential for manufacturability at scale are not explored.
It would also be interesting to see how this sensor's performance compares to other types of soft position sensors, such as those based on resistive or optical sensing principles. A more comprehensive comparison could help potential users understand the trade-offs and choose the most appropriate sensor for their specific applications.
Overall, this paper presents a significant advancement in the field of soft sensors and represents an important step towards the integration of such sensors into a wide range of robotic and wearable systems.
Conclusion
This paper introduces a novel soft two-degree-of-freedom dielectric elastomer position sensor that exhibits a linear response. The key innovations of this work are the sensor's ability to measure position in two independent directions and the careful design that achieves a linear relationship between the sensor's output and the object's position.
The demonstrated performance of the sensor, in terms of linearity, sensitivity, and repeatability, makes it a promising candidate for integration into a variety of soft robotic and wearable applications. The linear response, in particular, simplifies the integration and control of the sensor, allowing for more precise position tracking and control.
While the paper does not address all potential limitations or areas for further research, it represents a significant advancement in the field of soft sensors and highlights the potential of dielectric elastomer technology for a wide range of sensing applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Soft Two-degree-of-freedom Dielectric Elastomer Position Sensor Exhibiting Linear Behavior
Alexandre Girard, Jean-Philippe Lucking Bigu'e, Benjamin M. O'Brien, Todd A. Gisby, Iain A. Anderson, Jean-S'ebastien Plante
Soft robots could bring robotic systems to new horizons, by enabling safe human-machine interaction. For precise control, these soft structures require high level position feedback that is not easily achieved through conventional one-degree-of-freedom (DOF) sensing apparatus. In this paper, a soft two-DOF dielectric elastomer (DE) sensor is specifically designed to provide accurate position feedback for a soft polymer robotic manipulator. The technology is exemplified on a soft robot intended for MRI-guided prostate interventions. DEs are chosen for their major advantages of softness, high strains, low cost and embedded multiple-DOF sensing capability, providing excellent system integration. A geometrical model of the proposed DE sensor is developed and compared to experimental results in order to understand sensor mechanics. Using a differential measurement approach, a handmade prototype provided linear sensory behavior and 0.2 mm accuracy on two-DOF. This correlates to a 0.7% error over the sensor's 30 mm x 30 mm planar range, demonstrating the outstanding potential of DE technology for accurate multi-DOF position sensing.
Read more5/28/2024
📈
0
Simplified discrete model for axisymmetric dielectric elastomer membranes with robotic applications
Zhaowei Liu, Mingchao Liu, K. Jimmy Hsia, Xiaonan Huang, Weicheng Huang
Soft robots utilizing inflatable dielectric membranes can realize intricate functionalities through the application of non-mechanical fields. However, given the current limitations in simulations, including low computational efficiency and difficulty in dealing with complex external interactions, the design and control of such soft robots often require trial and error. Thus, a novel one-dimensional (1D) discrete differential geometry (DDG)-based numerical model is developed for analyzing the highly nonlinear mechanics in axisymmetric inflatable dielectric membranes. The model captures the intricate dynamics of these membranes under both inflationary pressure and electrical stimulation. Comprehensive validations using hyperelastic benchmarks demonstrate the model's accuracy and reliability. Additionally, the focus on the electro-mechanical coupling elucidates critical insights into the membrane's behavior under varying internal pressures and electrical loads. The research further translates these findings into innovative soft robotic applications, including a spherical soft actuator, a soft circular fluid pump, and a soft toroidal gripper, where the snap-through of electroelastic membrane plays a crucial role. Our analyses reveal that the functional ranges of soft robots are amplified by the snap-through of an electroelastic membrane upon electrical stimuli. This study underscores the potential of DDG-based simulations to advance the understanding of the nonlinear mechanics of electroelastic membranes and guide the design of electroelastic actuators in soft robotics applications.
Read more5/21/2024

0
Differentiable Discrete Elastic Rods for Real-Time Modeling of Deformable Linear Objects
Yizhou Chen, Yiting Zhang, Zachary Brei, Tiancheng Zhang, Yuzhen Chen, Julie Wu, Ram Vasudevan
This paper addresses the task of modeling Deformable Linear Objects (DLOs), such as ropes and cables, during dynamic motion over long time horizons. This task presents significant challenges due to the complex dynamics of DLOs. To address these challenges, this paper proposes differentiable Discrete Elastic Rods For deformable linear Objects with Real-time Modeling (DEFORM), a novel framework that combines a differentiable physics-based model with a learning framework to model DLOs accurately and in real-time. The performance of DEFORM is evaluated in an experimental setup involving two industrial robots and a variety of sensors. A comprehensive series of experiments demonstrate the efficacy of DEFORM in terms of accuracy, computational speed, and generalizability when compared to state-of-the-art alternatives. To further demonstrate the utility of DEFORM, this paper integrates it into a perception pipeline and illustrates its superior performance when compared to the state-of-the-art methods while tracking a DLO even in the presence of occlusions. Finally, this paper illustrates the superior performance of DEFORM when compared to state-of-the-art methods when it is applied to perform autonomous planning and control of DLOs. Project page: https://roahmlab.github.io/DEFORM/.
Read more9/17/2024
0
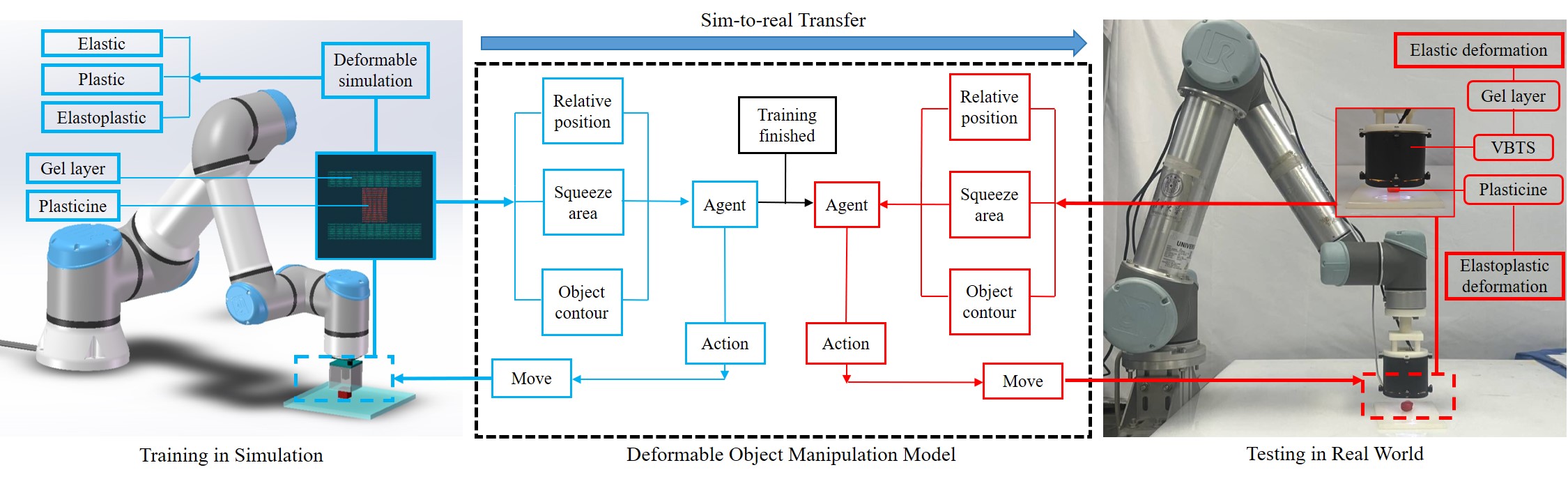
Soft Contact Simulation and Manipulation Learning of Deformable Objects with Vision-based Tactile Sensor
Jianhua Shan, Yuhao Sun, Shixin Zhang, Fuchun Sun, Zixi Chen, Zirong Shen, Cesare Stefanini, Yiyong Yang, Shan Luo, Bin Fang
Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real transfer. We propose a novel approach utilizing Vision-Based Tactile Sensors (VBTSs) as the end-effector in simulation to produce observations like relative position, squeezed area, and object contour, which are transferable to real robots. For a more realistic contact simulation, a new simulation environment including elastic, plastic, and elastoplastic deformations is created. We utilize RL strategies to train agents in the simulation, and expert demonstrations are applied for challenging tasks. Finally, we build a real experimental platform to complete the sim-to-real transfer and achieve a 90% success rate on difficult tasks such as cylinder and sphere. To test the robustness of our method, we use plasticine of different hardness and sizes to repeat the tasks including cylinder and sphere. The experimental results show superior performances of deformable object manipulation with the proposed method.
Read more5/14/2024