Stationary Kernels and Gaussian Processes on Lie Groups and their Homogeneous Spaces II: non-compact symmetric spaces

0
🏋️
Sign in to get full access
Overview
- Gaussian processes are a widely used class of models in machine learning for spatiotemporal data.
- These models can encode prior information about the function being modeled and enable Bayesian learning.
- One fundamental form of prior information is invariance to symmetries, which gives rise to the concept of stationarity in non-Euclidean spaces.
- This work develops practical techniques for constructing stationary Gaussian processes on a variety of non-Euclidean spaces that arise in the context of symmetries.
- The techniques enable the calculation of covariance kernels and sampling from prior and posterior Gaussian processes defined on these spaces, making them compatible with standard Gaussian process software.
Plain English Explanation
Gaussian processes are a powerful class of machine learning models that are often used to work with data that has both spatial and temporal components, such as measurements collected over time and space. These models allow you to incorporate prior information about the function you're trying to model, and they enable Bayesian learning, which means you can update your beliefs about the function as you gather more data.
One important type of prior information is the idea of symmetry. Many real-world phenomena exhibit symmetries, meaning that certain properties of the system don't change when you transform it in specific ways. For example, the laws of physics are the same no matter where you are in space or what orientation you're in. Capturing these symmetries in the Gaussian process model is crucial, and it gives rise to the concept of stationarity, which generalizes the idea of stationarity (where the statistical properties of the function don't change with location) to non-Euclidean spaces.
In this work, the authors developed practical techniques for building Gaussian process models that are stationary on a wide range of non-Euclidean spaces, which can arise when you're studying systems with symmetries. These techniques allow you to calculate the covariance kernel (which encodes the prior information) and sample from the prior and posterior Gaussian processes defined on these spaces. Importantly, the authors made these non-Euclidean Gaussian process models compatible with standard Gaussian process software, making them more accessible to practitioners.
Technical Explanation
The paper focuses on developing constructive and practical techniques for building stationary Gaussian process models on non-Euclidean spaces that arise in the context of symmetries. Gaussian processes are a widely used class of spatiotemporal models in machine learning, as they can encode prior information about the modeled function and enable exact or approximate Bayesian learning.
One of the most fundamental forms of prior information in many applications, particularly in the physical sciences, engineering, geostatistics, and neuroscience, is invariance to symmetries. The invariance of a Gaussian process' covariance to such symmetries gives rise to the concept of stationarity, which generalizes the notion of stationarity (where the statistical properties of the function don't change with location) to non-Euclidean spaces.
The authors developed techniques that make it possible to (i) calculate covariance kernels and (ii) sample from prior and posterior Gaussian processes defined on a large class of non-Euclidean spaces. These techniques involve different technical considerations for compact spaces (part I) and non-compact spaces with certain structure (part II). By making these non-Euclidean Gaussian process models compatible with well-understood computational techniques available in standard Gaussian process software packages, the authors have made them more accessible to practitioners.
Critical Analysis
The authors have made significant contributions to the field of Gaussian processes by developing practical techniques for building stationary Gaussian process models on a wide range of non-Euclidean spaces. This work is particularly valuable in applications where prior information in the form of symmetries is crucial, such as in the physical sciences, engineering, and other domains.
One potential limitation of the research is that it primarily focuses on the theoretical and computational aspects of the problem, without providing extensive empirical evaluation of the proposed techniques on real-world datasets. While the authors mention the compatibility with standard Gaussian process software, it would be helpful to see how these non-Euclidean Gaussian process models perform in practice compared to other approaches.
Additionally, the authors note that the techniques for non-compact spaces (part II) involve more technical considerations, which may limit their accessibility to some practitioners. It would be valuable to see further research aimed at simplifying these techniques or providing more user-friendly tools for applying them.
Overall, this work makes important advancements in the field of Gaussian processes and non-Euclidean modeling, and its potential impact on applications where symmetries are crucial is significant. Researchers and practitioners in the field should carefully consider the techniques presented in this paper and their implications for their own work.
Conclusion
This paper presents a significant contribution to the field of Gaussian processes by developing practical techniques for building stationary Gaussian process models on a wide range of non-Euclidean spaces that arise in the context of symmetries. The authors' work enables the calculation of covariance kernels and sampling from prior and posterior Gaussian processes defined on these spaces, making them compatible with standard Gaussian process software and more accessible to practitioners.
The techniques developed in this paper have the potential to greatly benefit applications in the physical sciences, engineering, geostatistics, neuroscience, and other domains where prior information in the form of symmetries is crucial. By bridging the gap between the theoretical and practical aspects of non-Euclidean Gaussian process modeling, this research paves the way for more widespread adoption and further advancements in the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
Stationary Kernels and Gaussian Processes on Lie Groups and their Homogeneous Spaces II: non-compact symmetric spaces
Iskander Azangulov, Andrei Smolensky, Alexander Terenin, Viacheslav Borovitskiy
Gaussian processes are arguably the most important class of spatiotemporal models within machine learning. They encode prior information about the modeled function and can be used for exact or approximate Bayesian learning. In many applications, particularly in physical sciences and engineering, but also in areas such as geostatistics and neuroscience, invariance to symmetries is one of the most fundamental forms of prior information one can consider. The invariance of a Gaussian process' covariance to such symmetries gives rise to the most natural generalization of the concept of stationarity to such spaces. In this work, we develop constructive and practical techniques for building stationary Gaussian processes on a very large class of non-Euclidean spaces arising in the context of symmetries. Our techniques make it possible to (i) calculate covariance kernels and (ii) sample from prior and posterior Gaussian processes defined on such spaces, both in a practical manner. This work is split into two parts, each involving different technical considerations: part I studies compact spaces, while part II studies non-compact spaces possessing certain structure. Our contributions make the non-Euclidean Gaussian process models we study compatible with well-understood computational techniques available in standard Gaussian process software packages, thereby making them accessible to practitioners.
Read more9/16/2024
🌀
0
A New Reliable & Parsimonious Learning Strategy Comprising Two Layers of Gaussian Processes, to Address Inhomogeneous Empirical Correlation Structures
Gargi Roy, Dalia Chakrabarty
We present a new strategy for learning the functional relation between a pair of variables, while addressing inhomogeneities in the correlation structure of the available data, by modelling the sought function as a sample function of a non-stationary Gaussian Process (GP), that nests within itself multiple other GPs, each of which we prove can be stationary, thereby establishing sufficiency of two GP layers. In fact, a non-stationary kernel is envisaged, with each hyperparameter set as dependent on the sample function drawn from the outer non-stationary GP, such that a new sample function is drawn at every pair of input values at which the kernel is computed. However, such a model cannot be implemented, and we substitute this by recalling that the average effect of drawing different sample functions from a given GP is equivalent to that of drawing a sample function from each of a set of GPs that are rendered different, as updated during the equilibrium stage of the undertaken inference (via MCMC). The kernel is fully non-parametric, and it suffices to learn one hyperparameter per layer of GP, for each dimension of the input variable. We illustrate this new learning strategy on a real dataset.
Read more4/22/2024
✨
0
Stationarity without mean reversion in improper Gaussian processes
Luca Ambrogioni
The behavior of a GP regression depends on the choice of covariance function. Stationary covariance functions are preferred in machine learning applications. However, (non-periodic) stationary covariance functions are always mean reverting and can therefore exhibit pathological behavior when applied to data that does not relax to a fixed global mean value. In this paper we show that it is possible to use improper GP priors with infinite variance to define processes that are stationary but not mean reverting. To this aim, we use of non-positive kernels that can only be defined in this limit regime. The resulting posterior distributions can be computed analytically and it involves a simple correction of the usual formulas. The main contribution of the paper is the introduction of a large family of smooth non-reverting covariance functions that closely resemble the kernels commonly used in the GP literature (e.g. squared exponential and Mat'ern class). By analyzing both synthetic and real data, we demonstrate that these non-positive kernels solve some known pathologies of mean reverting GP regression while retaining most of the favorable properties of ordinary smooth stationary kernels.
Read more5/16/2024
0
Markovian Gaussian Process: A Universal State-Space Representation for Stationary Temporal Gaussian Process
Weihan Li, Yule Wang, Chengrui Li, Anqi Wu
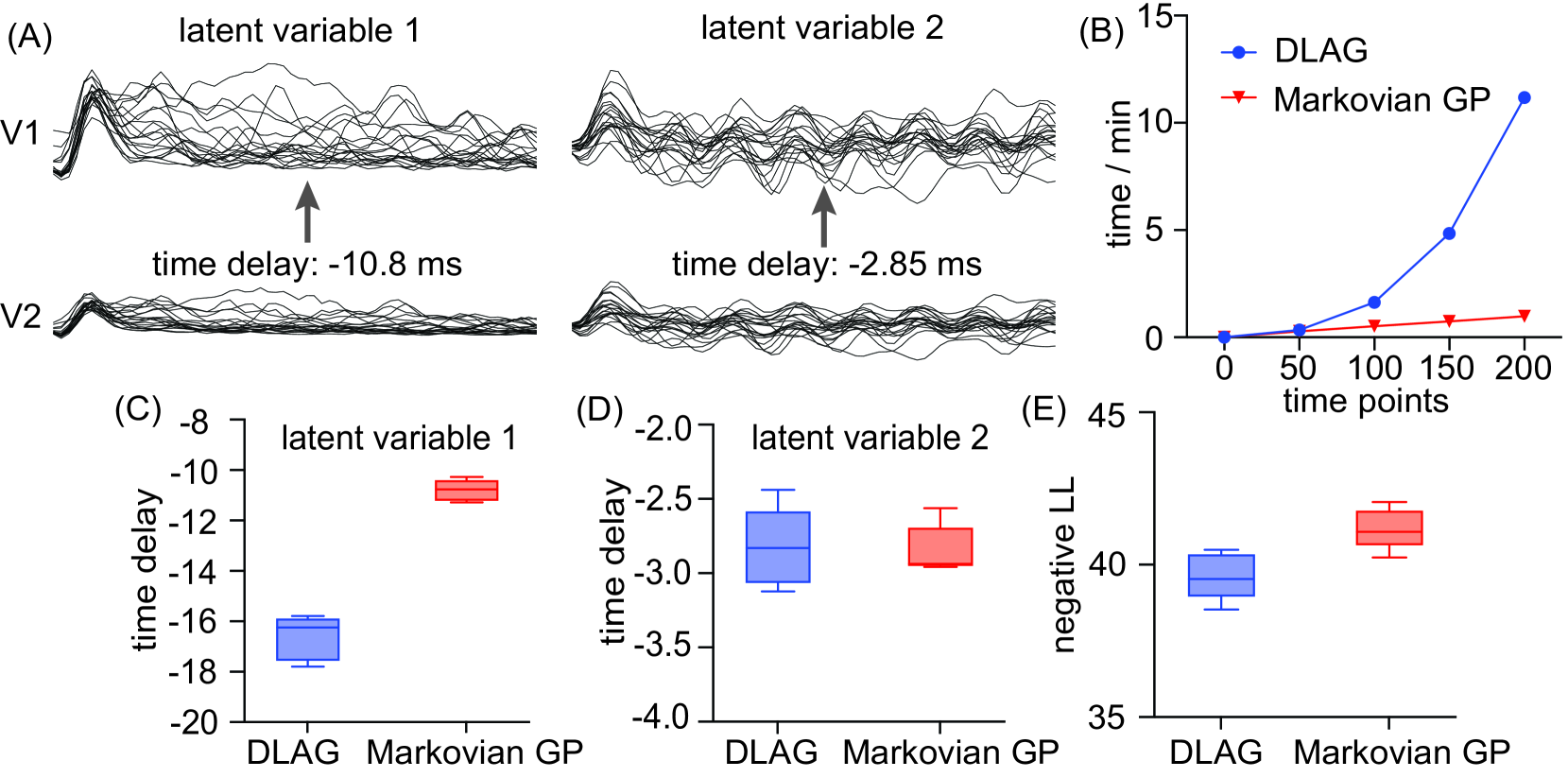
Gaussian Processes (GPs) and Linear Dynamical Systems (LDSs) are essential time series and dynamic system modeling tools. GPs can handle complex, nonlinear dynamics but are computationally demanding, while LDSs offer efficient computation but lack the expressive power of GPs. To combine their benefits, we introduce a universal method that allows an LDS to mirror stationary temporal GPs. This state-space representation, known as the Markovian Gaussian Process (Markovian GP), leverages the flexibility of kernel functions while maintaining efficient linear computation. Unlike existing GP-LDS conversion methods, which require separability for most multi-output kernels, our approach works universally for single- and multi-output stationary temporal kernels. We evaluate our method by computing covariance, performing regression tasks, and applying it to a neuroscience application, demonstrating that our method provides an accurate state-space representation for stationary temporal GPs.
Read more7/2/2024