Stretch or Vibrate? Rendering Spatial Information of Static and Moving Objects in VR via Haptic Feedback for Blind People

0

Sign in to get full access
Overview
- This paper explores how to effectively render spatial information of static and moving objects in virtual reality (VR) using haptic feedback for blind users.
- The researchers investigate two types of haptic feedback: skin drag (stretching) and vibration, and evaluate their ability to convey information about object size, location, and motion.
- The goal is to improve blind users' spatial awareness and navigation in VR environments.
Plain English Explanation
The researchers in this paper wanted to find better ways to help blind people understand the layout and movement of objects in virtual reality (VR) environments. Typically, VR relies heavily on visual information, which is not accessible to blind users.
To address this, the researchers looked at using two types of haptic (touch-based) feedback: skin drag and vibration. Skin drag involves gently stretching the user's skin to give a sense of an object's size and location, while vibration can indicate an object's motion.
The researchers ran experiments to see how well each haptic feedback type could convey information about the size, position, and movement of virtual objects to blind participants. The goal was to improve blind users' spatial awareness and ability to navigate VR environments using only touch-based cues.
Technical Explanation
The paper investigates the use of skin drag and vibration haptic feedback to render spatial information of static and moving objects in VR for blind users.
In the experiments, participants were asked to use a haptic interface to explore virtual objects and identify their size, location, and motion. The researchers compared the effectiveness of skin drag vs. vibration feedback in conveying this spatial information.
The skin drag feedback was implemented by applying lateral forces to the user's skin to simulate the feeling of an object's surface. The vibration feedback used vibrotactile actuators to indicate an object's movement.
The results showed that skin drag was better at conveying information about an object's size and location, while vibration was more effective for communicating motion. The researchers conclude that a combination of the two haptic feedback types may be the most effective way to render comprehensive spatial information in VR for blind users.
Critical Analysis
The paper provides a thoughtful exploration of using haptic feedback to improve spatial awareness for blind users in VR. The experimental design and analysis appear rigorous, and the findings offer valuable insights.
One potential limitation is the relatively small sample size of just 12 participants. While the results seem promising, a larger study could help validate the conclusions and identify any individual differences in how users respond to the haptic feedback.
Additionally, the paper does not address the feasibility or cost of implementing the proposed haptic interfaces in practical VR systems. Integrating this technology into affordable, consumer-grade VR gear may be an important next step.
Finally, the paper focuses solely on static and moving object information, but blind users may need to understand other spatial cues, such as room layouts, obstacles, and navigational landmarks. Exploring how haptic feedback can convey a more comprehensive spatial model could be an area for further research.
Overall, this work makes a valuable contribution to the field of accessible VR design. With continued development and testing, the concepts explored here could help unlock the benefits of virtual reality for blind and visually impaired users.
Conclusion
This paper investigates the use of haptic feedback, specifically skin drag and vibration, to convey spatial information about static and moving objects in virtual reality to blind users. The results suggest that a combination of these two haptic feedback types may be the most effective way to help blind users develop a comprehensive understanding of their virtual environment.
By improving blind users' spatial awareness in VR, this research has the potential to unlock new possibilities for accessible virtual experiences, such as virtual training, gaming, and collaborative work. As VR technology continues to advance, findings like these can guide the development of inclusive systems that cater to the diverse needs of all users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Stretch or Vibrate? Rendering Spatial Information of Static and Moving Objects in VR via Haptic Feedback for Blind People
Jiasheng Li, Zining Zhang, Zeyu Yan, Yuhang Zhao, Huaishu Peng
Perceiving spatial information of a virtual object (e.g., direction, distance) is critical yet challenging for blind users seeking an immersive virtual reality experience. To facilitate VR accessibility for blind users, in this paper, we investigate the effectiveness of two types of haptic cues--vibrotactile and skin-stretch cues--in conveying the spatial information of a virtual object when applied to the dorsal side of a blind user's hand. We conducted a user study with 10 blind users to investigate how they perceive static and moving objects in VR with a custom-made haptic apparatus. Our results reveal that blind users can more accurately understand an object's location and movement when receiving skin-stretch cues, as opposed to vibrotactile cues. We discuss the pros and cons of both types of haptic cues and conclude with design recommendations for future haptic solutions for VR accessibility.
Read more8/14/2024

0
Investigating Size Congruency Between the Visual Perception of a VR Object and the Haptic Perception of Its Physical World Agent
Wenqi Zheng, Dawei Xiong, Cekai Weng, Jiajun Jiang, Junwei Li, Jinni Zhou, Mingming Fan
The perception of physical objects and miniatures enhances the realism and immersion in VR. This work explores the relationship between haptic feedback from real objects and their visual representations in VR. The study examines how users confirm and adjust the sizes of different virtual objects. The results show that as the size of the virtual cubes increases, users are less likely to perceive the size correctly and need more adjustments. This research provides insights into how haptic sensations and visual inputs interact, contributing to the understanding of visual-haptic illusions in VR environments.
Read more8/16/2024

0
Human Impedance Modulation to Improve Visuo-Haptic Perception
Xiaoxiao Cheng, Shixian Shen, Ekaterina Ivanova, Gerolamo Carboni, Atsushi Takagi, Etienne Burdet
Humans activate muscles to shape the mechanical interaction with their environment, but can they harness this control mechanism to best sense the environment? We investigated how participants adapt their muscle activation to visual and haptic information when tracking a randomly moving target with a robotic interface. The results exhibit a differentiated effect of these sensory modalities, where participants' muscle cocontraction increases with the haptic noise and decreases with the visual noise, in apparent contradiction to previous results. These results can be explained, and reconciled with previous findings, when considering muscle spring like mechanics, where stiffness increases with cocontraction to regulate motion guidance. Increasing cocontraction to more closely follow the motion plan favors accurate visual over haptic information, while decreasing it avoids injecting visual noise and relies on accurate haptic information. We formulated this active sensing mechanism as the optimization of visuo-haptic information and effort. This OIE model can explain the adaptation of muscle activity to unimodal and multimodal sensory information when interacting with fixed or dynamic environments, or with another human, and can be used to optimize human-robot interaction.
Read more9/11/2024
0
Stretch your reach: Studying Self-Avatar and Controller Misalignment in Virtual Reality Interaction
Jose Luis Ponton, Reza Keshavarz, Alejandro Beacco, Nuria Pelechano
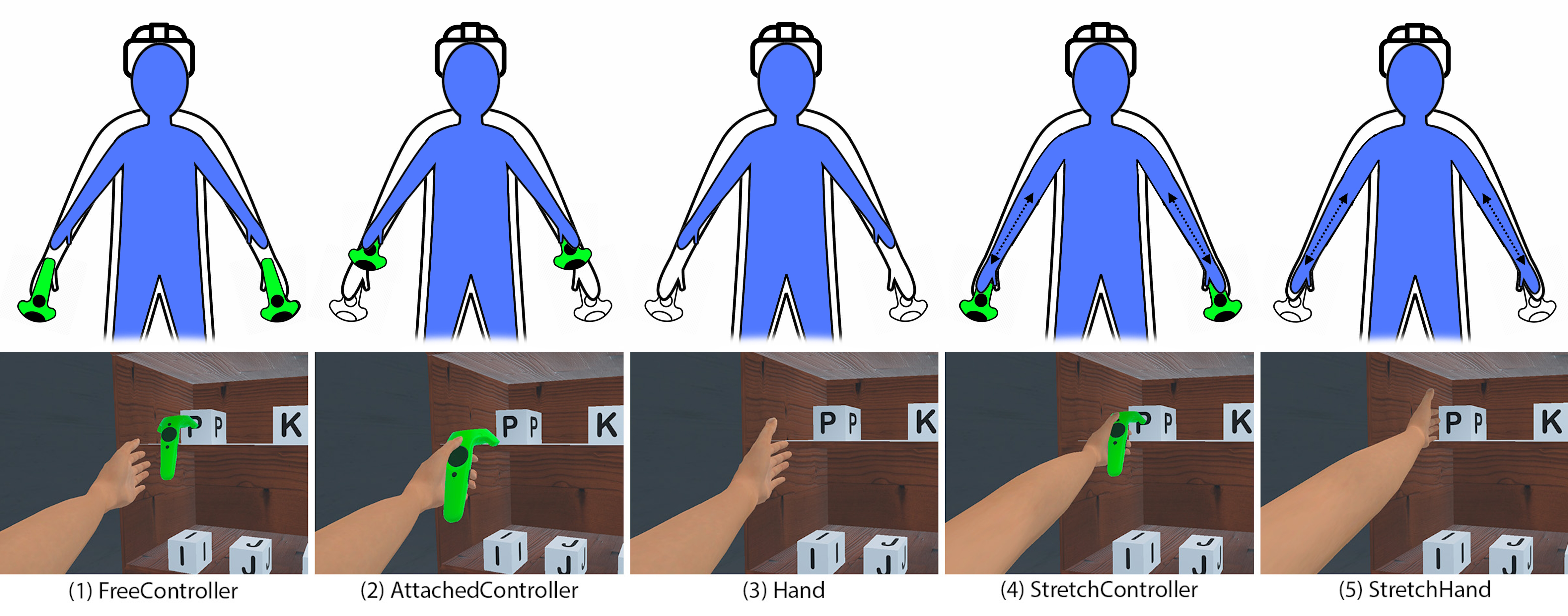
Immersive Virtual Reality typically requires a head-mounted display (HMD) to visualize the environment and hand-held controllers to interact with the virtual objects. Recently, many applications display full-body avatars to represent the user and animate the arms to follow the controllers. Embodiment is higher when the self-avatar movements align correctly with the user. However, having a full-body self-avatar following the user's movements can be challenging due to the disparities between the virtual body and the user's body. This can lead to misalignments in the hand position that can be noticeable when interacting with virtual objects. In this work, we propose five different interaction modes to allow the user to interact with virtual objects despite the self-avatar and controller misalignment and study their influence on embodiment, proprioception, preference, and task performance. We modify aspects such as whether the virtual controllers are rendered, whether controllers are rendered in their real physical location or attached to the user's hand, and whether stretching the avatar arms to always reach the real controllers. We evaluate the interaction modes both quantitatively (performance metrics) and qualitatively (embodiment, proprioception, and user preference questionnaires). Our results show that the stretching arms solution, which provides body continuity and guarantees that the virtual hands or controllers are in the correct location, offers the best results in embodiment, user preference, proprioception, and performance. Also, rendering the controller does not have an effect on either embodiment or user preference.
Read more7/12/2024