SWinGS: Sliding Windows for Dynamic 3D Gaussian Splatting

1

Sign in to get full access
Overview
- This paper introduces a new technique called "SWAGS" (Sampling Windows Adaptively for Dynamic 3D Gaussian Splatting) for reconstructing dynamic 3D scenes.
- SWAGS aims to capture the motion and geometry of objects in a scene by adaptively sampling and rendering them using Gaussian splats.
- The method is designed to be efficient and scalable, allowing for real-time performance on complex dynamic scenes.
Plain English Explanation
SWAGS: Sampling Windows Adaptively for Dynamic 3D Gaussian Splatting is a new technique for creating 3D models of moving objects and scenes. Unlike traditional 3D modeling, which can be slow and complex, SWAGS uses a clever approach called "Gaussian splatting" to quickly capture the shape and motion of objects.
The key idea behind SWAGS is to represent the 3D geometry of a scene using small, overlapping "splats" that have a Gaussian (bell-shaped) distribution. These splats are positioned and sized adaptively to efficiently capture the details of the scene, even as objects move and change shape. By adjusting the splats in real-time, SWAGS can create high-quality 3D models of dynamic scenes without requiring a lot of computational power.
This is particularly useful for applications like augmented reality, virtual reality, and robotics, where you need to quickly understand the 3D structure of a changing environment. By using SWAGS, these systems can create detailed 3D models on the fly, without having to rely on pre-scanned data or complex rendering algorithms.
Technical Explanation
SWAGS: Sampling Windows Adaptively for Dynamic 3D Gaussian Splatting is a novel technique for reconstructing dynamic 3D scenes using an adaptive Gaussian splatting approach. Unlike traditional methods that rely on explicit 3D meshes or point clouds, SWAGS represents the scene geometry using a set of overlapping Gaussian splats.
The key contributions of the SWAGS method include:
-
Adaptive Sampling: SWAGS employs an adaptive sampling strategy that dynamically adjusts the size and position of the Gaussian splats based on the local scene complexity. This allows the method to efficiently capture both fine details and larger structures in the scene.
-
Dynamic Reconstruction: SWAGS can handle dynamic scenes by continuously updating the splat parameters to track the motion of objects. This enables real-time reconstruction of complex, deforming 3D geometries.
-
Efficient Rendering: The Gaussian splat representation allows for efficient rendering using standard graphics pipelines, including GPU acceleration. This enables SWAGS to achieve high-performance 3D reconstruction and visualization.
The SWAGS pipeline consists of several key steps:
-
Depth Map Acquisition: SWAGS takes as input a sequence of depth maps, either from a depth sensor or estimated from RGB images using techniques like SC-GS: Sparse-Controlled Gaussian Splatting or SuperPoint Gaussian Splatting.
-
Adaptive Splat Placement: The method dynamically places and sizes the Gaussian splats to efficiently capture the scene geometry, using an adaptive algorithm that considers factors such as local depth variation and occlusion boundaries.
-
Splat Parameter Estimation: SWAGS estimates the parameters (position, size, and orientation) of each Gaussian splat based on the input depth data and the adaptive sampling strategy.
-
Temporal Tracking: To handle dynamic scenes, SWAGS tracks the motion of the Gaussian splats over time, allowing the method to reconstruct deforming 3D geometries.
-
Efficient Rendering: The Gaussian splat representation enables efficient rendering using standard graphics techniques, such as point-based rendering or deferred shading.
The authors demonstrate the effectiveness of SWAGS through extensive experiments on both synthetic and real-world dynamic scenes, showing that the method can achieve high-quality 3D reconstruction with real-time performance.
Critical Analysis
The SWAGS method presents a compelling approach to dynamic 3D scene reconstruction, leveraging the flexibility and efficiency of Gaussian splatting. Some key strengths of the technique include:
- Adaptability: The adaptive sampling strategy allows SWAGS to capture both fine details and larger structures in the scene, making it well-suited for a wide range of applications.
- Temporal Coherence: The ability to track the motion of Gaussian splats over time enables the reconstruction of deforming 3D geometries, an important capability for dynamic scenes.
- Computational Efficiency: The Gaussian splat representation and rendering techniques employed by SWAGS enable real-time performance, a critical requirement for many practical use cases.
However, the paper also acknowledges several potential limitations and areas for further research:
- Accuracy Tradeoffs: While SWAGS achieves high-quality reconstruction, there may be some accuracy tradeoffs compared to more traditional 3D modeling techniques, especially for highly complex or detailed scenes.
- Sensor Dependence: The method relies on high-quality depth data, either from depth sensors or estimated using techniques like 3D Geometry-Aware Deformable Gaussian Splatting. The performance of SWAGS may be sensitive to the quality and reliability of the input depth data.
- Artifact Handling: The paper mentions that the Gaussian splat representation can potentially introduce certain artifacts, such as blurring or ghosting effects, which may need to be addressed through further refinements of the method.
Overall, the SWAGS technique represents an innovative and promising approach to dynamic 3D scene reconstruction, with potential applications in a wide range of fields, from augmented reality and virtual reality to robotics and autonomous systems. The paper's insights and the authors' ongoing research in this area are likely to contribute significantly to the continued development of efficient and high-quality 3D reconstruction techniques for dynamic environments.
Conclusion
The SWAGS method introduced in this paper offers a novel approach to dynamic 3D scene reconstruction that leverages the flexibility and efficiency of adaptive Gaussian splatting. By representing the scene geometry using a dynamic set of overlapping Gaussian splats, SWAGS can capture the motion and deformation of objects in real-time, with performance that is suitable for a wide range of applications.
The key strengths of SWAGS include its adaptability, temporal coherence, and computational efficiency, which are achieved through the method's innovative adaptive sampling strategy and Gaussian splat-based rendering. While the technique may involve some accuracy tradeoffs compared to more traditional 3D modeling approaches, the paper's insights and the authors' ongoing research in this area suggest that SWAGS and related techniques will continue to play an important role in the development of high-quality and practical 3D reconstruction solutions for dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
1
SWinGS: Sliding Windows for Dynamic 3D Gaussian Splatting
Richard Shaw, Michal Nazarczuk, Jifei Song, Arthur Moreau, Sibi Catley-Chandar, Helisa Dhamo, Eduardo Perez-Pellitero
Novel view synthesis has shown rapid progress recently, with methods capable of producing increasingly photorealistic results. 3D Gaussian Splatting has emerged as a promising method, producing high-quality renderings of scenes and enabling interactive viewing at real-time frame rates. However, it is limited to static scenes. In this work, we extend 3D Gaussian Splatting to reconstruct dynamic scenes. We model a scene's dynamics using dynamic MLPs, learning deformations from temporally-local canonical representations to per-frame 3D Gaussians. To disentangle static and dynamic regions, tuneable parameters weigh each Gaussian's respective MLP parameters, improving the dynamics modelling of imbalanced scenes. We introduce a sliding window training strategy that partitions the sequence into smaller manageable windows to handle arbitrary length scenes while maintaining high rendering quality. We propose an adaptive sampling strategy to determine appropriate window size hyperparameters based on the scene's motion, balancing training overhead with visual quality. Training a separate dynamic 3D Gaussian model for each sliding window allows the canonical representation to change, enabling the reconstruction of scenes with significant geometric changes. Temporal consistency is enforced using a fine-tuning step with self-supervising consistency loss on randomly sampled novel views. As a result, our method produces high-quality renderings of general dynamic scenes with competitive quantitative performance, which can be viewed in real-time in our dynamic interactive viewer.
Read more7/19/2024
👁️
0
SwinGS: Sliding Window Gaussian Splatting for Volumetric Video Streaming with Arbitrary Length
Bangya Liu, Suman Banerjee
Recent advances in 3D Gaussian Splatting (3DGS) have garnered significant attention in computer vision and computer graphics due to its high rendering speed and remarkable quality. While extant research has endeavored to extend the application of 3DGS from static to dynamic scenes, such efforts have been consistently impeded by excessive model sizes, constraints on video duration, and content deviation. These limitations significantly compromise the streamability of dynamic 3D Gaussian models, thereby restricting their utility in downstream applications, including volumetric video, autonomous vehicle, and immersive technologies such as virtual, augmented, and mixed reality. This paper introduces SwinGS, a novel framework for training, delivering, and rendering volumetric video in a real-time streaming fashion. To address the aforementioned challenges and enhance streamability, SwinGS integrates spacetime Gaussian with Markov Chain Monte Carlo (MCMC) to adapt the model to fit various 3D scenes across frames, in the meantime employing a sliding window captures Gaussian snapshots for each frame in an accumulative way. We implement a prototype of SwinGS and demonstrate its streamability across various datasets and scenes. Additionally, we develop an interactive WebGL viewer enabling real-time volumetric video playback on most devices with modern browsers, including smartphones and tablets. Experimental results show that SwinGS reduces transmission costs by 83.6% compared to previous work with ignorable compromise in PSNR. Moreover, SwinGS easily scales to long video sequences without compromising quality.
Read more9/14/2024

0
Gaussian Splatting LK
Liuyue Xie, Joel Julin, Koichiro Niinuma, Laszlo A. Jeni
Reconstructing dynamic 3D scenes from 2D images and generating diverse views over time presents a significant challenge due to the inherent complexity and temporal dynamics involved. While recent advancements in neural implicit models and dynamic Gaussian Splatting have shown promise, limitations persist, particularly in accurately capturing the underlying geometry of highly dynamic scenes. Some approaches address this by incorporating strong semantic and geometric priors through diffusion models. However, we explore a different avenue by investigating the potential of regularizing the native warp field within the dynamic Gaussian Splatting framework. Our method is grounded on the key intuition that an accurate warp field should produce continuous space-time motions. While enforcing the motion constraints on warp fields is non-trivial, we show that we can exploit knowledge innate to the forward warp field network to derive an analytical velocity field, then time integrate for scene flows to effectively constrain both the 2D motion and 3D positions of the Gaussians. This derived Lucas-Kanade style analytical regularization enables our method to achieve superior performance in reconstructing highly dynamic scenes, even under minimal camera movement, extending the boundaries of what existing dynamic Gaussian Splatting frameworks can achieve.
Read more7/17/2024
1
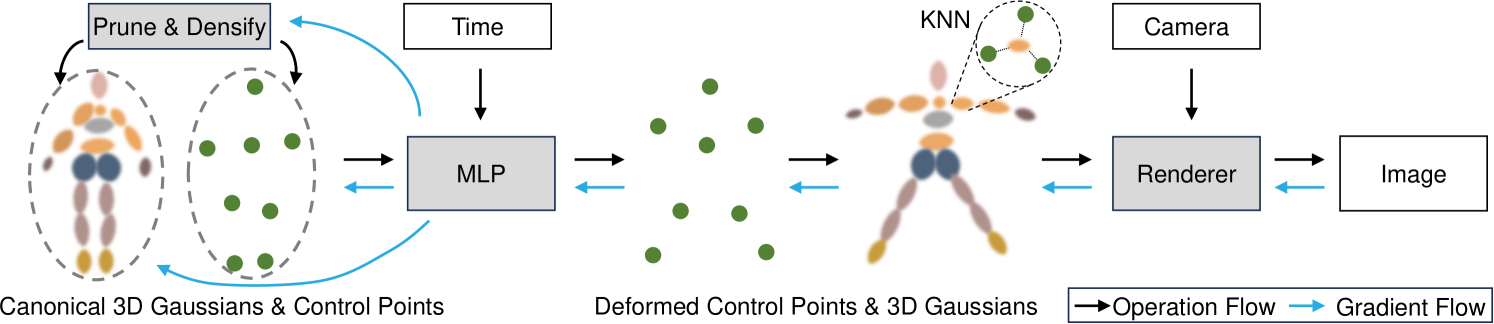
SC-GS: Sparse-Controlled Gaussian Splatting for Editable Dynamic Scenes
Yi-Hua Huang, Yang-Tian Sun, Ziyi Yang, Xiaoyang Lyu, Yan-Pei Cao, Xiaojuan Qi
Novel view synthesis for dynamic scenes is still a challenging problem in computer vision and graphics. Recently, Gaussian splatting has emerged as a robust technique to represent static scenes and enable high-quality and real-time novel view synthesis. Building upon this technique, we propose a new representation that explicitly decomposes the motion and appearance of dynamic scenes into sparse control points and dense Gaussians, respectively. Our key idea is to use sparse control points, significantly fewer in number than the Gaussians, to learn compact 6 DoF transformation bases, which can be locally interpolated through learned interpolation weights to yield the motion field of 3D Gaussians. We employ a deformation MLP to predict time-varying 6 DoF transformations for each control point, which reduces learning complexities, enhances learning abilities, and facilitates obtaining temporal and spatial coherent motion patterns. Then, we jointly learn the 3D Gaussians, the canonical space locations of control points, and the deformation MLP to reconstruct the appearance, geometry, and dynamics of 3D scenes. During learning, the location and number of control points are adaptively adjusted to accommodate varying motion complexities in different regions, and an ARAP loss following the principle of as rigid as possible is developed to enforce spatial continuity and local rigidity of learned motions. Finally, thanks to the explicit sparse motion representation and its decomposition from appearance, our method can enable user-controlled motion editing while retaining high-fidelity appearances. Extensive experiments demonstrate that our approach outperforms existing approaches on novel view synthesis with a high rendering speed and enables novel appearance-preserved motion editing applications. Project page: https://yihua7.github.io/SC-GS-web/
Read more4/15/2024