Switched Vector Field-based Guidance for General Reference Path Following in Planar Environment
2405.06355
0
0
✨
Abstract
Reference path following is a key component in the functioning of almost all engineered autonomous agents. Among several path following guidance methods in existing literature, vector-field-based guidance approach has got wide attention because of its simplicity and guarantee of stability under a broad class of scenarios. However, the usage of same cross-track-error-dependent structure of desired vector field in most of the existing literature irrespective of instantaneous cross-track error and course angle of unmanned vehicle makes it quite restrictive in attaining faster convergence and also leads to infeasibly high turn rate command for many scenarios. To this end, this paper presents a novel switched vector field-based guidance for following a general reference path, in which the structure of the desired vector field depends on instantaneous cross-track-error and vehicle's course angle. While the developed method ensures faster convergence, it also ensures that the guidance command always stays within a realistic threshold satisfying its curvature constraint, thus making it more real-life implementable for autonomous vehicles with kino-dynamic constraints. Theoretical analysis for convergence of the developed guidance scheme is presented. Possibilities of undesirable chattering at phase transitions are also eliminated. Numerical simulation studies are presented to validate the satisfactory performance of the developed algorithm.
Create account to get full access
Overview
- Path following is a crucial component for autonomous agents
- Vector-field-based guidance is a popular approach, but has limitations
- This paper presents a novel switched vector field-based guidance method
Plain English Explanation
This paper presents a new way for autonomous vehicles to follow a reference path. Existing methods often use the same structure for the desired vector field, which can make it hard for the vehicle to turn quickly and smoothly. The new method proposed in this paper adapts the vector field based on the vehicle's current position and angle, allowing for faster convergence to the path while staying within the vehicle's movement constraints. This makes the guidance system more practical for real-world autonomous vehicles with limitations on how sharply they can turn.
Technical Explanation
The paper introduces a switched vector field-based guidance approach for following a general reference path. Unlike previous methods that use the same vector field structure regardless of the vehicle's position and angle, this new approach adjusts the vector field based on the current cross-track error and course angle of the vehicle.
This allows for faster convergence to the reference path while ensuring that the guidance commands stay within realistic thresholds that satisfy the vehicle's curvature constraints. Theoretical analysis is provided to demonstrate the convergence properties of the developed guidance scheme, and numerical simulations validate the satisfactory performance of the algorithm.
Critical Analysis
The paper addresses an important practical limitation of existing vector field-based guidance methods by adapting the vector field structure to the vehicle's state. This allows for faster path following while respecting the vehicle's kinodynamic constraints, making the approach more realistically implementable.
However, the paper does not explore the performance of the method in the presence of disturbances or uncertainties, which would be an important consideration for real-world autonomous systems. Additionally, experimental validation on physical platforms would further strengthen the case for the practical applicability of the proposed guidance scheme.
Conclusion
This paper presents a novel switched vector field-based guidance approach for autonomous vehicles to follow reference paths. By dynamically adjusting the structure of the desired vector field based on the vehicle's state, the method achieves faster convergence to the path while staying within the vehicle's movement constraints. This makes the guidance system more suitable for real-world implementation on autonomous agents with kinodynamic limitations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Adaptive Line-Of-Sight guidance law based on vector fields path following for underactuated unmanned surface vehicle
Jie Qi, Ronghua Wanga, Nailong Wu
0
0
The focus of this paper is to develop a methodology that enables an unmanned surface vehicle (USV) to efficiently track a planned path. The introduction of a vector field-based adaptive line of-sight guidance law (VFALOS) for accurate trajectory tracking and minimizing the overshoot response time during USV tracking of curved paths improves the overall line-of-sight (LOS) guidance method. These improvements contribute to faster convergence to the desired path, reduce oscillations, and can mitigate the effects of persistent external disturbances. It is shown that the proposed guidance law exhibits k-exponential stability when converging to the desired path consisting of straight and curved lines. The results in the paper show that the proposed method effectively improves the accuracy of the USV tracking the desired path while ensuring the safety of the USV work.
4/8/2024
👀
Vector Field-Guided Learning Predictive Control for Motion Planning of Mobile Robots with Unknown Dynamics
Yang Lu, Weijia Yao, Yongqian Xiao, Xin Xu
0
0
Safe maneuvering capability is critical for mobile robots in complex environments. However, robotic system dynamics are often time-varying, uncertain, or even unknown during the motion planning and control process. Therefore, many existing model-based reinforcement learning (RL) methods could not achieve satisfactory reliability in guaranteeing safety. To address this challenge, we propose a two-level Vector Field-guided Learning Predictive Control (VF-LPC) approach that guarantees safe maneuverability. The first level, the guiding level, generates safe desired trajectories using the designed kinodynamic guiding vector field, enabling safe motion in obstacle-dense environments. The second level, the Integrated Motion Planning and Control (IMPC) level, first uses the deep Koopman operator to learn a nominal dynamics model offline and then updates the model uncertainties online using sparse Gaussian processes (GPs). The learned dynamics and game-based safe barrier function are then incorporated into the learning predictive control framework to generate near-optimal control sequences. We conducted tests to compare the performance of VF-LPC with existing advanced planning methods in an obstacle-dense environment. The simulation results show that it can generate feasible trajectories quickly. Then, VF-LPC is evaluated against motion planning methods that employ model predictive control (MPC) and RL in high-fidelity CarSim software. The results show that VF-LPC outperforms them under metrics of completion time, route length, and average solution time. We also carried out path-tracking control tests on a racing road to validate the model uncertainties learning capability. Finally, we conducted real-world experiments on a Hongqi E-HS3 vehicle, further validating the VF-LPC approach's effectiveness.
5/15/2024

Path Planning and Motion Control for Accurate Positioning of Car-like Robots
Jin Dai, Zejiang Wang, Yebin Wang, Rien Quirynen, Stefano Di Cairano
0
0
This paper investigates the planning and control for accurate positioning of car-like robots. We propose a solution that integrates two modules: a motion planner, facilitated by the rapidly-exploring random tree algorithm and continuous-curvature (CC) steering technique, generates a CC trajectory as a reference; and a nonlinear model predictive controller (NMPC) regulates the robot to accurately track the reference trajectory. Based on the $mu$-tangency conditions in prior art, we derive explicit existence conditions and develop associated computation methods for a special class of CC paths which not only admit the same driving patterns as Reeds-Shepp paths but also consist of cusp-free clothoid turns. Afterwards, we create an autonomous vehicle parking scenario where the NMPC endeavors to follow the reference trajectory. Feasibility and computational efficiency of the CC steering are validated by numerical simulation. CarSim-Simulink joint simulations statistically verify that with exactly same NMPC, the closed-loop system with CC trajectories as references substantially outperforms the case where Reeds-Shepp trajectories are used as references.
6/11/2024
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
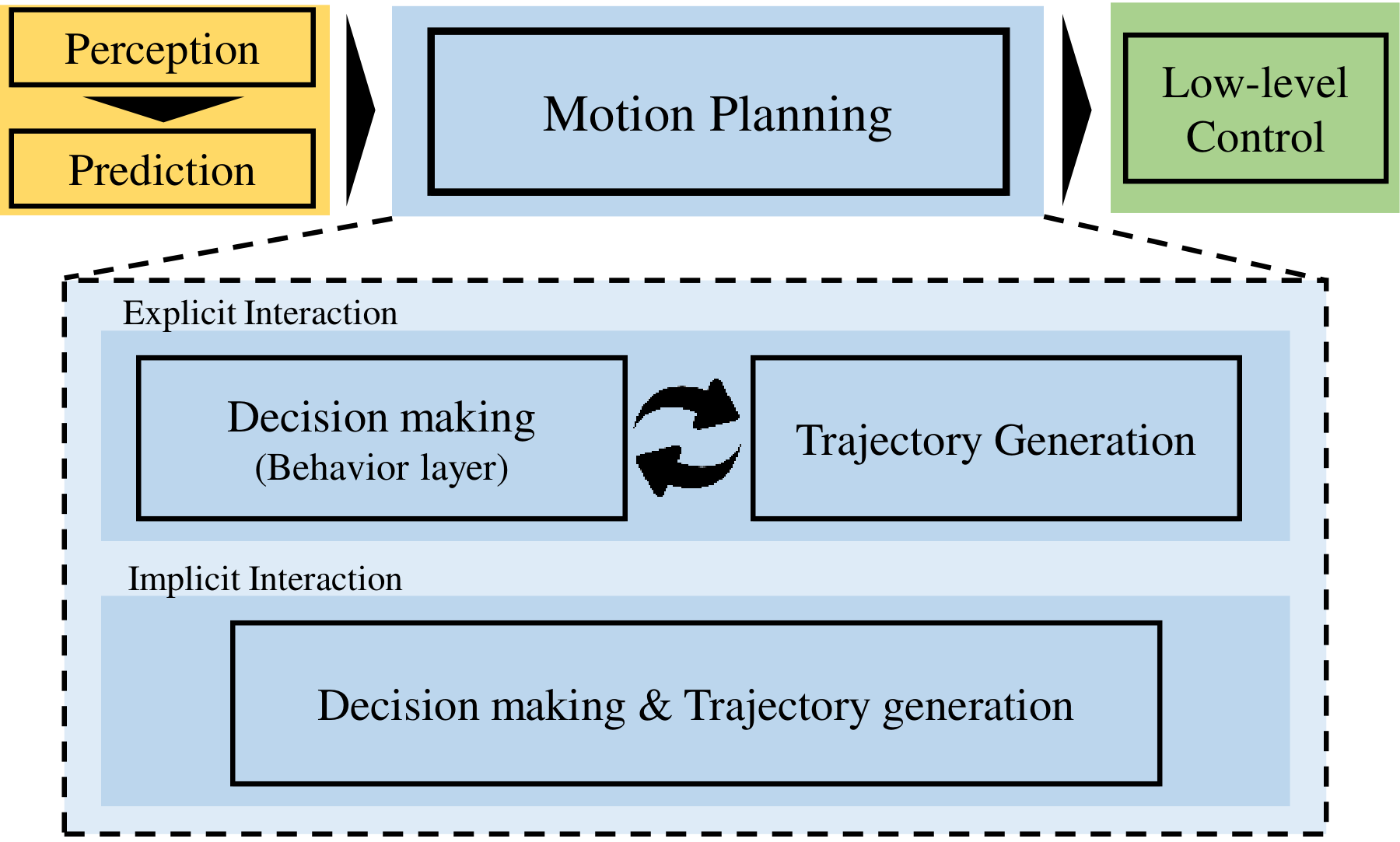
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024