A Framework for Guided Motion Planning
2404.03133
0
0

Abstract
Randomized sampling based algorithms are widely used in robot motion planning due to the problem's intractability, and are experimentally effective on a wide range of problem instances. Most variants bias their sampling using various heuristics related to the known underlying structure of the search space. In this work, we formalize the intuitive notion of guided search by defining the concept of a guiding space. This new language encapsulates many seemingly distinct prior methods under the same framework, and allows us to reason about guidance, a previously obscured core contribution of different algorithms. We suggest an information theoretic method to evaluate guidance, which experimentally matches intuition when tested on known algorithms in a variety of environments. The language and evaluation of guidance suggests improvements to existing methods, and allows for simple hybrid algorithms that combine guidance from multiple sources.
Create account to get full access
Overview
• This paper presents a framework for guided motion planning, which helps autonomous agents navigate complex environments more efficiently.
• The key idea is to incorporate guidance, such as high-level instructions or expert knowledge, into the motion planning process to improve the speed and quality of navigation.
• The framework involves defining a guidance model, optimizing the motion plan based on the guidance, and updating the guidance to iteratively improve the plan.
Plain English Explanation
Motion planning is the process of determining how an autonomous agent, such as a robot or self-driving car, should move through an environment to reach a desired destination. This can be a challenging task, especially in complex environments with obstacles, narrow passages, and other constraints.
The authors of this paper propose a framework that incorporates guidance into the motion planning process. The idea is that by providing the agent with high-level instructions or expert knowledge about the environment, it can navigate more efficiently and effectively.
For example, imagine you're trying to navigate a maze. If you have a map of the maze and some general directions, like "go north, then take the second left," you can plan your path much more quickly and easily than if you were just trying to explore the maze blindly. The guidance helps you avoid dead ends and find the optimal route.
Similarly, in the context of this paper, the autonomous agent uses the provided guidance to inform its motion planning. This might include information about the layout of the environment, the location of obstacles, or the preferred paths to take. The agent then optimizes its motion plan based on this guidance, and updates the guidance based on what it learns during the planning process.
By iterating between planning and guidance updates, the agent can continually improve its ability to navigate the environment, becoming more efficient and effective over time.
Technical Explanation
The key components of the framework are:
-
Guidance Model: This represents the high-level information or expert knowledge provided to the agent to guide its motion planning. It could include spatial maps, semantic annotations, or other task-specific guidance.
-
Motion Plan Optimization: The agent uses the guidance model to optimize its motion plan, considering factors like obstacle avoidance, energy efficiency, and task completion.
-
Guidance Update: Based on the results of the motion plan optimization, the agent updates the guidance model to improve future planning. This could involve refining the map, adjusting the semantic annotations, or incorporating lessons learned from previous plans.
The paper presents a mathematical formulation of the framework and demonstrates its application in several simulated scenarios, including navigation in cluttered environments and task-guided motion planning. The results show that the guided planning approach outperforms traditional motion planning algorithms in terms of speed, path quality, and task completion.
Critical Analysis
The paper provides a solid theoretical foundation for incorporating guidance into motion planning, and the simulation results are promising. However, the authors acknowledge that the framework has only been evaluated in simulation so far, and real-world deployment may present additional challenges.
One potential limitation is the reliance on accurate and comprehensive guidance models. In complex, dynamic environments, it may be difficult to obtain or maintain such detailed guidance information. The authors suggest that the framework could be extended to handle uncertain or incomplete guidance, but this would likely add additional complexity to the system.
Additionally, the paper does not address the potential for the guidance to introduce biases or limitations into the motion planning process. If the guidance is based on incomplete or biased data, it could lead the agent to make suboptimal decisions. The authors could have discussed strategies for mitigating this risk, such as incorporating uncertainty handling or robust planning techniques.
Overall, the paper presents a compelling framework for guided motion planning, but further research is needed to address the practical challenges of real-world deployment and potential limitations of the approach.
Conclusion
This paper introduces a novel framework for guided motion planning, which aims to improve the efficiency and effectiveness of autonomous navigation by incorporating high-level guidance into the planning process. The key idea is to define a guidance model, optimize the motion plan based on this guidance, and iteratively update the guidance to continuously improve the planning.
The proposed framework shows promising results in simulated scenarios, outperforming traditional motion planning algorithms. However, the authors acknowledge the need for further research to address real-world deployment challenges and potential limitations of the approach.
If successfully implemented, this guided motion planning framework could have significant implications for a wide range of autonomous systems, from self-driving cars to search-and-rescue robots. By leveraging expert knowledge and high-level instructions, these systems could navigate complex environments more efficiently and reliably, ultimately leading to safer and more capable autonomous agents.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
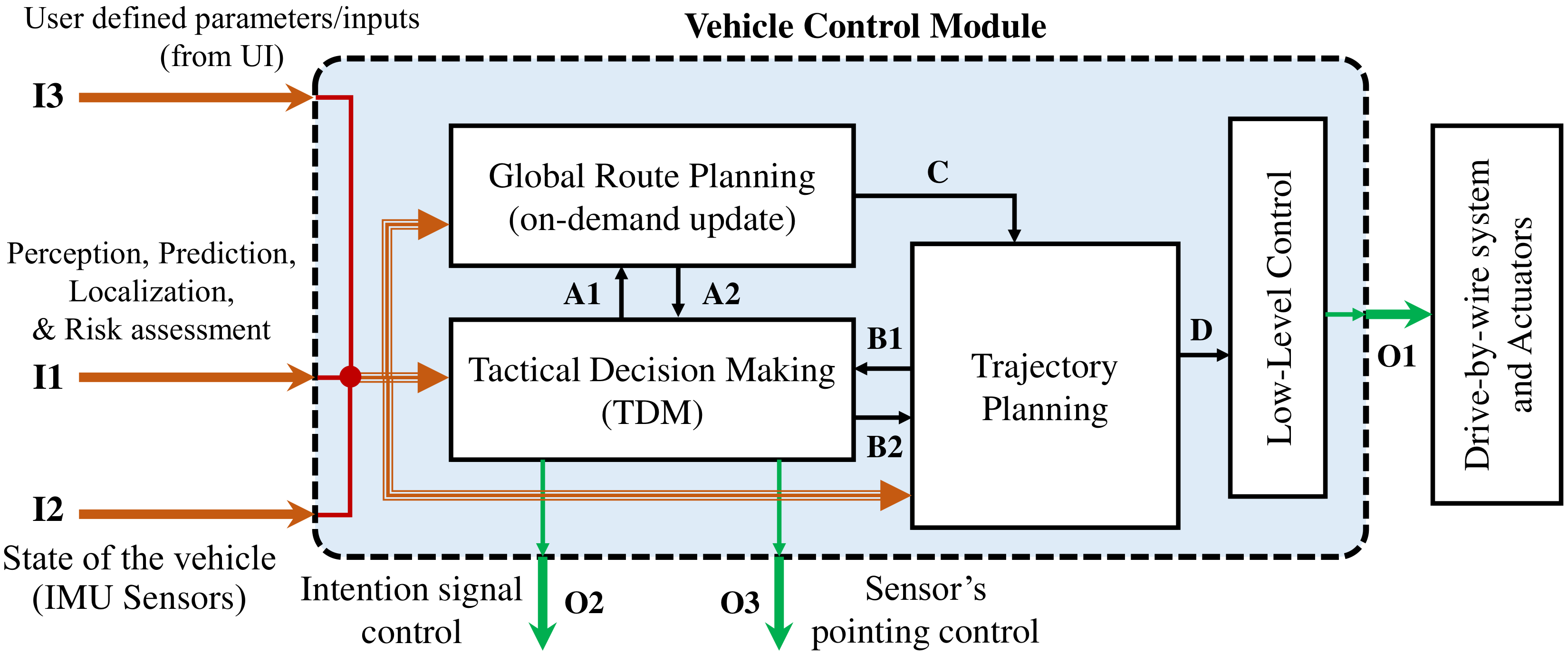
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024
A Survey on Hybrid Motion Planning Methods for Automated Driving Systems
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
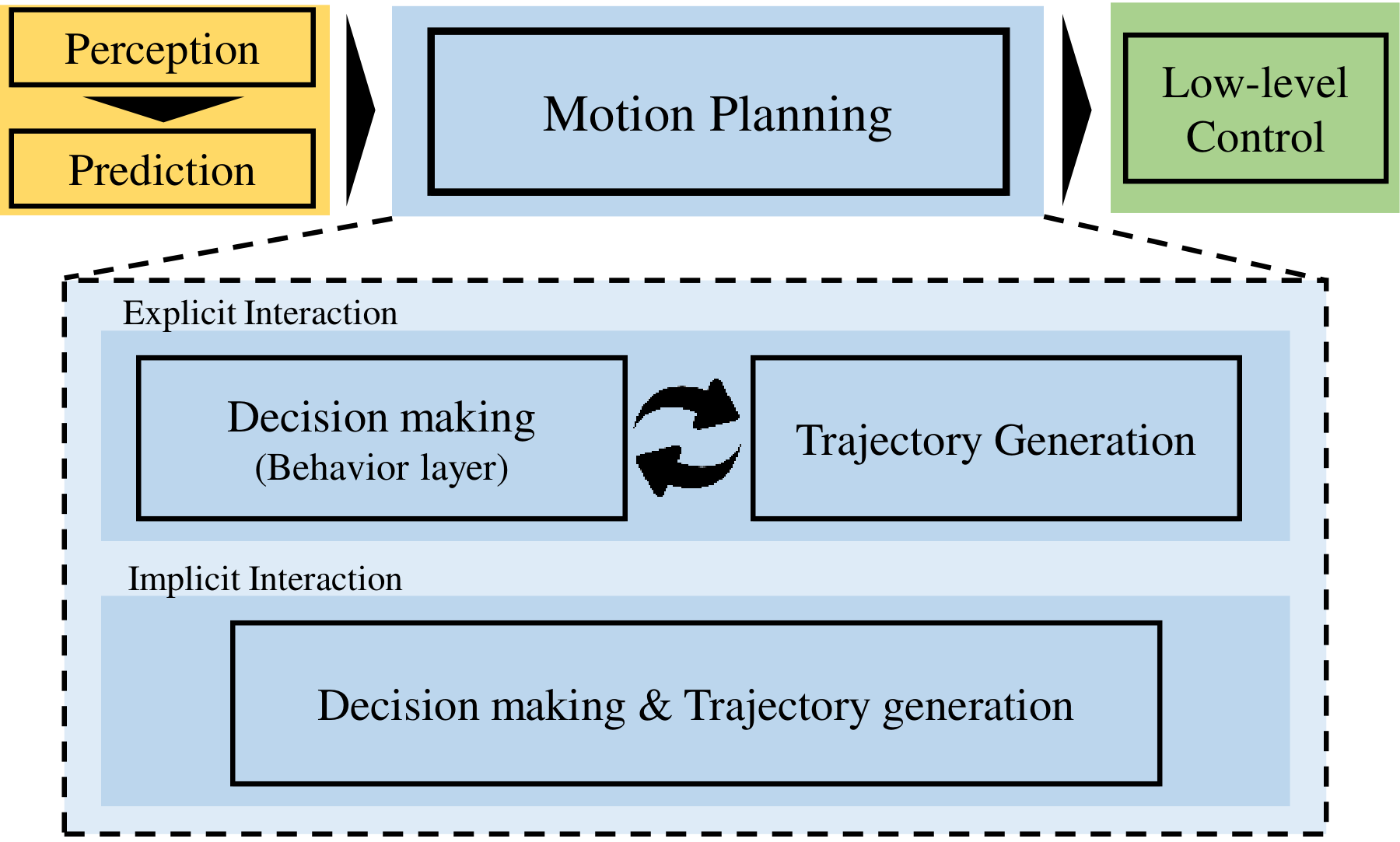
Motion planning is an essential element of the modular architecture of autonomous vehicles, serving as a bridge between upstream perception modules and downstream low-level control signals. Traditional motion planners were initially designed for specific Automated Driving Functions (ADFs), yet the evolving landscape of highly automated driving systems (ADS) requires motion for a wide range of ADFs, including unforeseen ones. This need has motivated the development of the ``hybrid approach in the literature, seeking to enhance motion planning performance by combining diverse techniques, such as data-driven (learning-based) and logic-driven (analytic) methodologies. Recent research endeavours have significantly contributed to the development of more efficient, accurate, and safe hybrid methods for Tactical Decision Making (TDM) and Trajectory Generation (TG), as well as integrating these algorithms into the motion planning module. Owing to the extensive variety and potential of hybrid methods, a timely and comprehensive review of the current literature is undertaken in this survey article. We classify the hybrid motion planners based on the types of components they incorporate, such as combinations of sampling-based with optimization-based/learning-based motion planners. The comparison of different classes is conducted by evaluating the addressed challenges and limitations, as well as assessing whether they focus on TG and/or TDM. We hope this approach will enable the researchers in this field to gain in-depth insights into the identification of current trends in hybrid motion planning and shed light on promising areas for future research.
6/11/2024

Task and Motion Planning for Execution in the Real
Tianyang Pan, Rahul Shome, Lydia E. Kavraki
0
0
Task and motion planning represents a powerful set of hybrid planning methods that combine reasoning over discrete task domains and continuous motion generation. Traditional reasoning necessitates task domain models and enough information to ground actions to motion planning queries. Gaps in this knowledge often arise from sources like occlusion or imprecise modeling. This work generates task and motion plans that include actions cannot be fully grounded at planning time. During execution, such an action is handled by a provided human-designed or learned closed-loop behavior. Execution combines offline planned motions and online behaviors till reaching the task goal. Failures of behaviors are fed back as constraints to find new plans. Forty real-robot trials and motivating demonstrations are performed to evaluate the proposed framework and compare against state-of-the-art. Results show faster execution time, less number of actions, and more success in problems where diverse gaps arise. The experiment data is shared for researchers to simulate these settings. The work shows promise in expanding the applicable class of realistic partially grounded problems that robots can address.
6/14/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024