Symmetry-aware Reinforcement Learning for Robotic Assembly under Partial Observability with a Soft Wrist
2402.18002
0
0

Abstract
This study tackles the representative yet challenging contact-rich peg-in-hole task of robotic assembly, using a soft wrist that can operate more safely and tolerate lower-frequency control signals than a rigid one. Previous studies often use a fully observable formulation, requiring external setups or estimators for the peg-to-hole pose. In contrast, we use a partially observable formulation and deep reinforcement learning from demonstrations to learn a memory-based agent that acts purely on haptic and proprioceptive signals. Moreover, previous works do not incorporate potential domain symmetry and thus must search for solutions in a bigger space. Instead, we propose to leverage the symmetry for sample efficiency by augmenting the training data and constructing auxiliary losses to force the agent to adhere to the symmetry. Results in simulation with five different symmetric peg shapes show that our proposed agent can be comparable to or even outperform a state-based agent. In particular, the sample efficiency also allows us to learn directly on the real robot within 3 hours.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This research paper proposes a symmetry-aware reinforcement learning (RL) approach for robotic assembly tasks under partial observability, utilizing a soft wrist to enhance flexibility and control.
- The key objectives are to enable robots to efficiently learn assembly skills in the presence of uncertainty and leverage symmetry properties to accelerate the learning process.
- The research builds upon prior work on data-efficient imitation learning for robotic assembly, visual-spatial attention and proprioceptive data-driven reinforcement learning, and constrained object placement using reinforcement learning.
Plain English Explanation
The paper presents a new way for robots to learn how to assemble things, even when they can't see everything they need to. The key idea is to use a "soft wrist" - a flexible joint that gives the robot more control and dexterity. The researchers also show how the robot can take advantage of symmetry, or patterns, in the objects it's trying to put together. This helps the robot learn faster and become more efficient at the assembly task.
The research builds on previous work that looked at how robots can learn assembly skills through imitation, using visual and tactile information. The new approach aims to make the learning process even more efficient and robust, so robots can handle uncertainty and partial information better. This could be useful for a wide range of robotic applications, from manufacturing to home assistants.
Technical Explanation
The paper proposes a symmetry-aware reinforcement learning (RL) framework for robotic assembly tasks under partial observability, utilizing a soft wrist to enhance flexibility and control. The key components include:
-
Partially Observable Markov Decision Process (POMDP) Formulation: The researchers model the assembly task as a POMDP, where the robot has incomplete information about the state of the environment.
-
Symmetry-Aware Policy Optimization: The RL agent leverages the symmetry properties of the assembly objects to accelerate the learning process and improve sample efficiency.
-
Soft Wrist Mechanism: The robot is equipped with a soft wrist joint, which provides additional degrees of freedom and compliance to handle uncertainties and improve task performance.
-
Multimodal Perception and Control: The robot integrates visual and proprioceptive (self-sensing) information to perceive the environment and guide its actions.
The authors evaluate their approach on a simulated robotic assembly task and demonstrate its effectiveness in terms of learning efficiency, task success rate, and robustness to partial observability, compared to baseline RL methods and approaches without the soft wrist mechanism or symmetry-awareness.
Critical Analysis
The paper presents a well-designed and comprehensive study, addressing important challenges in robotic assembly under uncertainty. The incorporation of a soft wrist mechanism and the exploitation of symmetry properties are novel and promising approaches to enhance the robot's flexibility and learning efficiency.
However, the research is still evaluated primarily in simulation, and the authors acknowledge the need for further validation on real-world robotic platforms. Practical considerations, such as the manufacturing and integration of the soft wrist, may pose additional challenges that should be addressed in future work.
Additionally, the paper could benefit from a more in-depth discussion of the limitations of the proposed approach, such as the potential sensitivity to the accuracy of the symmetry modeling or the scalability of the method to more complex assembly tasks involving a larger number of components.
Conclusion
This research proposes a symmetry-aware reinforcement learning framework for robotic assembly under partial observability, leveraging a soft wrist mechanism to improve flexibility and control. The approach demonstrates promising results in simulation, highlighting the potential benefits of incorporating task-specific symmetry properties and soft robotics principles to enhance the learning and execution of complex assembly skills.
The findings from this work could have significant implications for the development of more versatile and autonomous robotic systems, capable of adapting to uncertainties and efficiently learning new assembly tasks. Further exploration of real-world applications and addressing the identified limitations could lead to advancements in areas such as manufacturing, logistics, and home automation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Leveraging Procedural Generation for Learning Autonomous Peg-in-Hole Assembly in Space
Andrej Orsula, Matthieu Geist, Miguel Olivares-Mendez, Carol Martinez
0
0
The ability to autonomously assemble structures is crucial for the development of future space infrastructure. However, the unpredictable conditions of space pose significant challenges for robotic systems, necessitating the development of advanced learning techniques to enable autonomous assembly. In this study, we present a novel approach for learning autonomous peg-in-hole assembly in the context of space robotics. Our focus is on enhancing the generalization and adaptability of autonomous systems through deep reinforcement learning. By integrating procedural generation and domain randomization, we train agents in a highly parallelized simulation environment across a spectrum of diverse scenarios with the aim of acquiring a robust policy. The proposed approach is evaluated using three distinct reinforcement learning algorithms to investigate the trade-offs among various paradigms. We demonstrate the adaptability of our agents to novel scenarios and assembly sequences while emphasizing the potential of leveraging advanced simulation techniques for robot learning in space. Our findings set the stage for future advancements in intelligent robotic systems capable of supporting ambitious space missions and infrastructure development beyond Earth.
5/3/2024
JUICER: Data-Efficient Imitation Learning for Robotic Assembly
Lars Ankile, Anthony Simeonov, Idan Shenfeld, Pulkit Agrawal
0
0
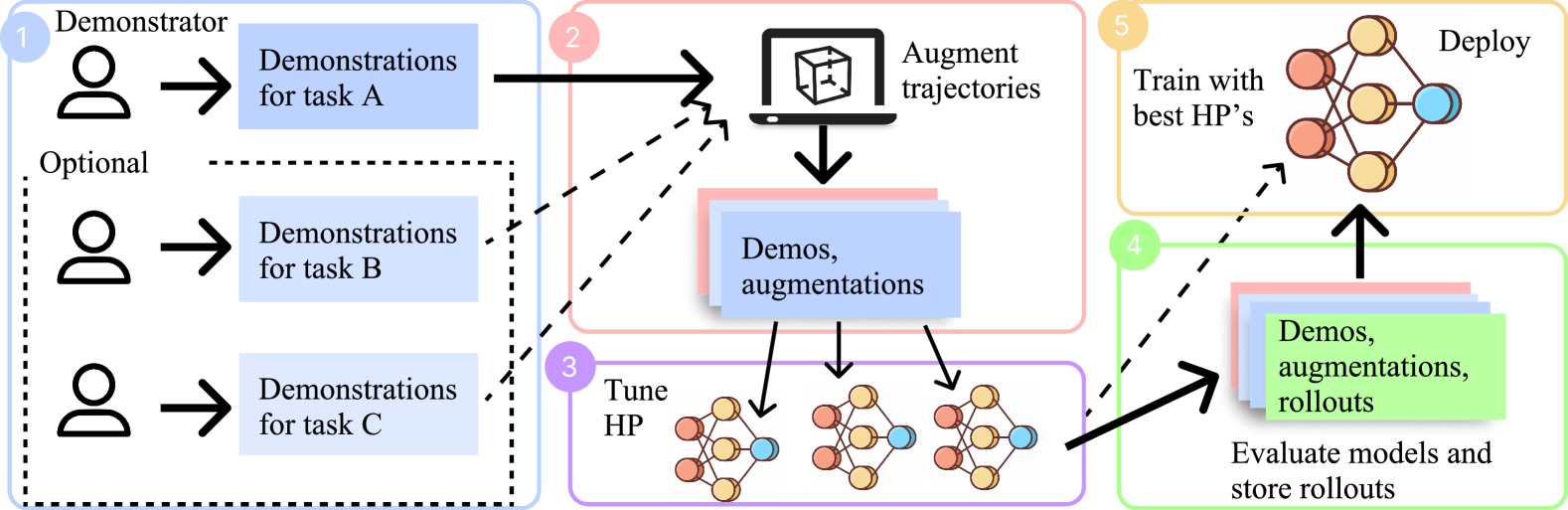
While learning from demonstrations is powerful for acquiring visuomotor policies, high-performance imitation without large demonstration datasets remains challenging for tasks requiring precise, long-horizon manipulation. This paper proposes a pipeline for improving imitation learning performance with a small human demonstration budget. We apply our approach to assembly tasks that require precisely grasping, reorienting, and inserting multiple parts over long horizons and multiple task phases. Our pipeline combines expressive policy architectures and various techniques for dataset expansion and simulation-based data augmentation. These help expand dataset support and supervise the model with locally corrective actions near bottleneck regions requiring high precision. We demonstrate our pipeline on four furniture assembly tasks in simulation, enabling a manipulator to assemble up to five parts over nearly 2500 time steps directly from RGB images, outperforming imitation and data augmentation baselines. Project website: https://imitation-juicer.github.io/.
4/11/2024
🔄
Robotic Constrained Imitation Learning for the Peg Transfer Task in Fundamentals of Laparoscopic Surgery
Kento Kawaharazuka, Kei Okada, Masayuki Inaba
0
0
In this study, we present an implementation strategy for a robot that performs peg transfer tasks in Fundamentals of Laparoscopic Surgery (FLS) via imitation learning, aimed at the development of an autonomous robot for laparoscopic surgery. Robotic laparoscopic surgery presents two main challenges: (1) the need to manipulate forceps using ports established on the body surface as fulcrums, and (2) difficulty in perceiving depth information when working with a monocular camera that displays its images on a monitor. Especially, regarding issue (2), most prior research has assumed the availability of depth images or models of a target to be operated on. Therefore, in this study, we achieve more accurate imitation learning with only monocular images by extracting motion constraints from one exemplary motion of skilled operators, collecting data based on these constraints, and conducting imitation learning based on the collected data. We implemented an overall system using two Franka Emika Panda Robot Arms and validated its effectiveness.
5/7/2024
Visual Spatial Attention and Proprioceptive Data-Driven Reinforcement Learning for Robust Peg-in-Hole Task Under Variable Conditions
Andr'e Yuji Yasutomi, Hideyuki Ichiwara, Hiroshi Ito, Hiroki Mori, Tetsuya Ogata
0
0
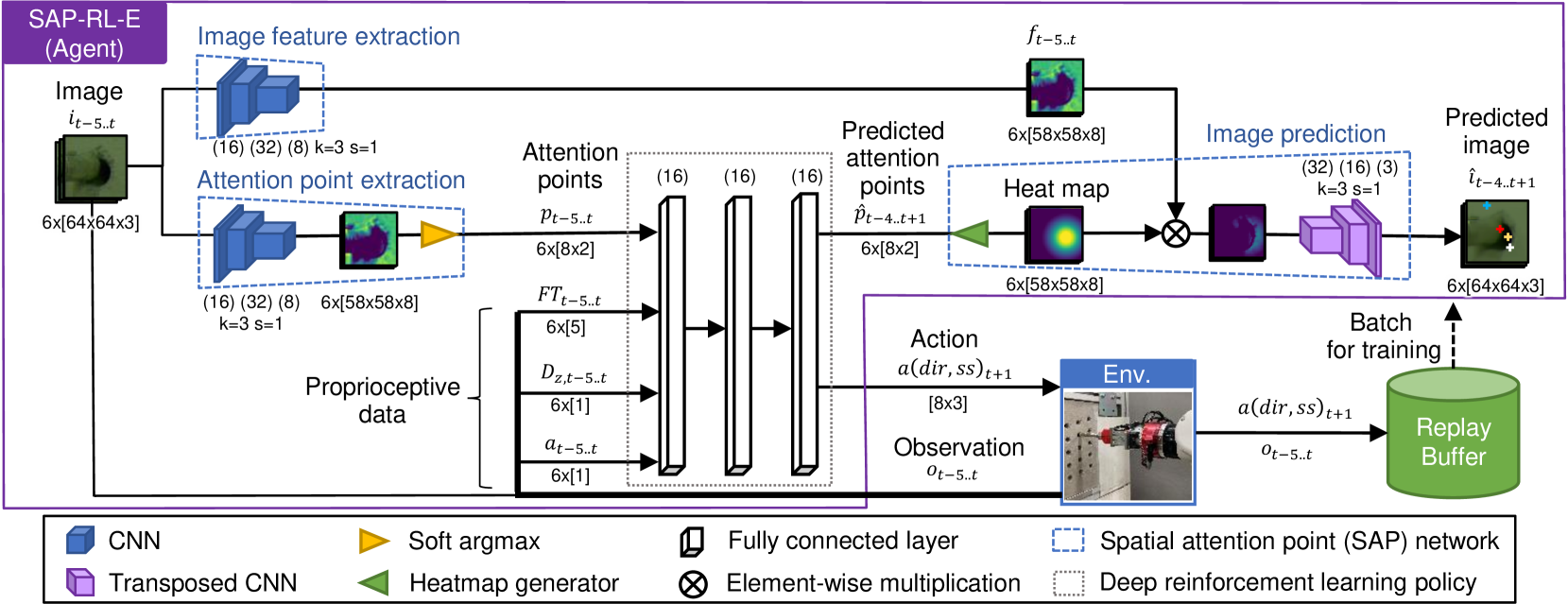
Anchor-bolt insertion is a peg-in-hole task performed in the construction field for holes in concrete. Efforts have been made to automate this task, but the variable lighting and hole surface conditions, as well as the requirements for short setup and task execution time make the automation challenging. In this study, we introduce a vision and proprioceptive data-driven robot control model for this task that is robust to challenging lighting and hole surface conditions. This model consists of a spatial attention point network (SAP) and a deep reinforcement learning (DRL) policy that are trained jointly end-to-end to control the robot. The model is trained in an offline manner, with a sample-efficient framework designed to reduce training time and minimize the reality gap when transferring the model to the physical world. Through evaluations with an industrial robot performing the task in 12 unknown holes, starting from 16 different initial positions, and under three different lighting conditions (two with misleading shadows), we demonstrate that SAP can generate relevant attention points of the image even in challenging lighting conditions. We also show that the proposed model enables task execution with higher success rate and shorter task completion time than various baselines. Due to the proposed model's high effectiveness even in severe lighting, initial positions, and hole conditions, and the offline training framework's high sample-efficiency and short training time, this approach can be easily applied to construction.
4/1/2024