Synesthesia of Machines (SoM)-Enhanced ISAC Precoding for Vehicular Networks with Double Dynamics

0

Sign in to get full access
Overview
- Synesthesia of Machines (SoM)-Enhanced ISAC Precoding for Vehicular Networks with Double Dynamics
- Integrates sensing and communication in vehicular networks
- Leverages deep reinforcement learning and hybrid precoding to handle complex dynamics
Plain English Explanation
The paper introduces a novel approach called "Synesthesia of Machines (SoM)-Enhanced ISAC Precoding" for vehicular networks with "double dynamics". This refers to the complex, rapidly changing conditions in these networks, where both the environment and the vehicles themselves are constantly in motion.
To address this challenge, the researchers propose integrating sensing and communication capabilities (ISAC) and using deep reinforcement learning and hybrid precoding techniques. This allows the system to adaptively adjust its behavior to the changing conditions, similar to how the human brain processes multiple sensory inputs simultaneously (a phenomenon known as synesthesia).
The key innovation is the ability to handle the "double dynamics" - the rapid changes in both the environment and the vehicles themselves. This is crucial for enabling reliable and efficient communication in real-world vehicular networks, where factors like vehicle movement, obstacles, and wireless interference can fluctuate quickly.
Technical Explanation
The paper presents a deep reinforcement learning-based ISAC precoding framework for vehicular networks with double dynamics. The authors formulate the problem as a Markov decision process, where the agent (the ISAC system) learns to optimize its precoding strategy based on observations of the environment and vehicle states.
The proposed architecture includes several key components:
- Sensing Module: This module uses semantic MIMO techniques to extract relevant information about the environment and vehicle states.
- Communication Module: This module employs hybrid precoding to optimize the transmission of data based on the information from the sensing module.
- Deep Reinforcement Learning Agent: This agent uses a deep neural network to learn the optimal precoding strategy by interacting with the environment and receiving rewards for successful communication.
The authors evaluate the proposed approach through simulations and demonstrate its ability to outperform traditional ISAC methods in terms of communication throughput and reliability, especially in scenarios with high mobility and complex environmental dynamics.
Critical Analysis
The paper presents a well-designed and comprehensive solution to the challenge of integrating sensing and communication in highly dynamic vehicular networks. The authors have thoughtfully addressed the "double dynamics" problem and leveraged state-of-the-art techniques like deep reinforcement learning and hybrid precoding to enable adaptive and robust performance.
However, the paper does not discuss potential limitations or challenges that may arise in real-world deployment. For example, the computational complexity of the deep reinforcement learning model or the sensitivity of the system to inaccurate sensing data could be potential issues that warrant further investigation.
Additionally, the authors could have explored the scalability of the proposed approach and its ability to handle large-scale vehicular networks with hundreds or thousands of vehicles. This would be an important consideration for practical applications.
Conclusion
The Synesthesia of Machines (SoM)-Enhanced ISAC Precoding framework presented in this paper represents a significant advancement in the field of vehicular communication. By seamlessly integrating sensing and communication capabilities and leveraging deep reinforcement learning, the system can adapt to rapidly changing environmental and vehicle dynamics, enabling reliable and efficient data transmission in real-world scenarios.
The innovative approach and the promising results demonstrated in the paper suggest that this research could have far-reaching implications for the development of future intelligent transportation systems, where the ability to maintain robust and responsive communication is crucial for ensuring safety, efficiency, and the smooth integration of autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Synesthesia of Machines (SoM)-Enhanced ISAC Precoding for Vehicular Networks with Double Dynamics
Zonghui Yang, Shijian Gao, Xiang Cheng, Liuqing Yang
Integrated sensing and communication (ISAC) technology plays a crucial role in vehicular networks. However, the communication channel within this context exhibits time-varying characteristics, and potential targets may move rapidly, resulting in double dynamics. These presents significant challenges for real-time ISAC precoding design that have not been thoroughly explored. While optimization-based precoding methods have been extensively studied, they are computationally complex and heavily rely on perfect prior information that is rarely available in situations with double dynamics. In this paper, we propose a synesthesia of machine (SoM)-enhanced precoding paradigm, where the base station leverages various modalities such as positioning and channel information to adapt to double dynamics, and effectively utilizes environmental information to stretch ISAC performance boundaries through a deep reinforcement learning framework. Additionally, a parameter-shared actor-critic architecture is tailored to expedite training in complex state and action spaces. Extensive experimental validation has demonstrated the multifaceted superiority of our method over existing approaches.
Read more8/27/2024
🤿
0
Doubly-Dynamic ISAC Precoding for Vehicular Networks: A Constrained Deep Reinforcement Learning (CDRL) Approach
Zonghui Yang, Shijian Gao, Xiang Cheng
Integrated sensing and communication (ISAC) technology is essential for supporting vehicular networks. However, the communication channel in this scenario exhibits time variations, and the potential targets may move rapidly, resulting in double dynamics. This nature poses a challenge for real-time precoder design. While optimization-based solutions are widely researched, they are complex and heavily rely on perfect channel-related information, which is impractical in double dynamics. To address this challenge, we propose using constrained deep reinforcement learning to facilitate dynamic updates to the ISAC precoder. Additionally, the primal dual-deep deterministic policy gradient and Wolpertinger architecture are tailored to efficiently train the algorithm under complex constraints and varying numbers of users. The proposed scheme not only adapts to the dynamics based on observations but also leverages environmental information to enhance performance and reduce complexity. Its superiority over existing candidates has been validated through experiments.
Read more8/26/2024
0
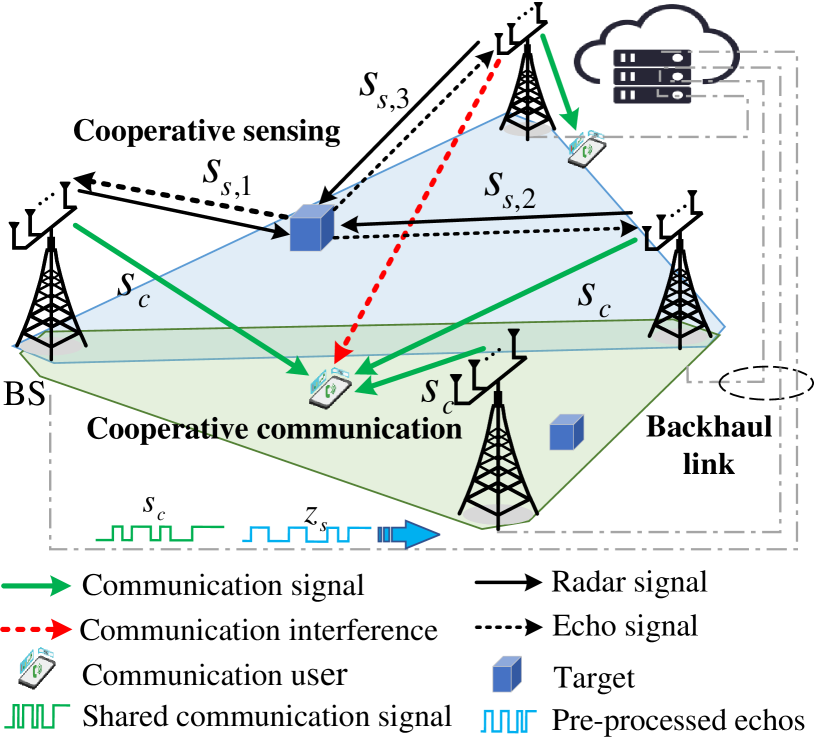
Cooperative Sensing and Communication for ISAC Networks: Performance Analysis and Optimization
Kaitao Meng, Christos Masouros
In this work, we study integrated sensing and communication (ISAC) networks intending to effectively balance sensing and communication (S&C) performance at the network level. Through the simultaneous utilization of multi-point (CoMP) coordinated joint transmission and distributed multiple-input multiple-output (MIMO) radar techniques, we propose a cooperative networked ISAC scheme to enhance both S&C services. Then, the tool of stochastic geometry is exploited to capture the S&C performance, which allows us to illuminate key cooperative dependencies in the ISAC network. Remarkably, the derived expression of the Cramer-Rao lower bound (CRLB) of the localization accuracy unveils a significant finding: Deploying $N$ ISAC transceivers yields an enhanced sensing performance across the entire network, in accordance with the $ln^2N$ scaling law. Simulation results demonstrate that compared to the time-sharing scheme, the proposed cooperative ISAC scheme can effectively improve the average data rate and reduce the CRLB.
Read more4/1/2024

0
Generative AI-Enhanced Multi-Modal Semantic Communication in Internet of Vehicles: System Design and Methodologies
Jiayi Lu, Wanting Yang, Zehui Xiong, Chengwen Xing, Rahim Tafazolli, Tony Q. S. Quek, Merouane Debbah
Vehicle-to-everything (V2X) communication supports numerous tasks, from driving safety to entertainment services. To achieve a holistic view, vehicles are typically equipped with multiple sensors to compensate for undetectable blind spots. However, processing large volumes of multi-modal data increases transmission load, while the dynamic nature of vehicular networks adds to transmission instability. To address these challenges, we propose a novel framework, Generative Artificial intelligence (GAI)-enhanced multi-modal semantic communication (SemCom), referred to as G-MSC, designed to handle various vehicular network tasks by employing suitable analog or digital transmission. GAI presents a promising opportunity to transform the SemCom framework by significantly enhancing semantic encoding to facilitate the optimized integration of multi-modal information, enhancing channel robustness, and fortifying semantic decoding against noise interference. To validate the effectiveness of the G-MSC framework, we conduct a case study showcasing its performance in vehicular communication networks for predictive tasks. The experimental results show that the design achieves reliable and efficient communication in V2X networks. In the end, we present future research directions on G-MSC.
Read more9/25/2024