TACOS: Topology-Aware Collective Algorithm Synthesizer for Distributed Machine Learning

0
🔍
Sign in to get full access
The rise of artificial intelligence and large language models has led to the development of large-scale machine learning training clusters. Communication within these clusters is heavily dependent on network bandwidth, making the routing algorithm a critical factor in determining performance. However, current communication libraries are limited to a fixed set of routing algorithms, which constrains collective performance in next-generation training clusters with complex, heterogeneous, and asymmetric large-scale topologies. Additionally, irregular topologies caused by runtime phenomena like device failures further compound the challenge.
To address this issue, the paper introduces TACOS, an automated synthesizer that generates topology-aware collective algorithms for common distributed machine learning collectives across arbitrary input network topologies. TACOS was able to synthesize an All-Reduce algorithm for a heterogeneous 512-NPU system in just 6.09 minutes, achieving performance improvements of up to 4.27 times over state-of-the-art prior work. TACOS exhibits high scalability, with synthesis time scaling quadratically with the number of NPUs. In contrast to prior NP-hard approaches, TACOS can handle 40K NPUs in 2.52 hours.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔍
0
TACOS: Topology-Aware Collective Algorithm Synthesizer for Distributed Machine Learning
William Won, Midhilesh Elavazhagan, Sudarshan Srinivasan, Ajaya Durg, Samvit Kaul, Swati Gupta, Tushar Krishna
The surge of artificial intelligence, specifically large language models, has led to a rapid advent towards the development of large-scale machine learning training clusters. Collective communications within these clusters tend to be heavily bandwidth-bound, necessitating techniques to optimally utilize the available network bandwidth. This puts the routing algorithm for the collective at the forefront of determining the performance. Unfortunately, communication libraries used in distributed machine learning today are limited by a fixed set of routing algorithms. This constraints collective performance within the domain of next-generation training clusters that employ intricate, heterogeneous, and asymmetric, large-scale topologies. Further, the emergence of irregular topologies attributed to runtime phenomena such as device failures serves to compound the complexity of the challenge. To this end, this paper introduces TACOS, an automated synthesizer that generates topology-aware collective algorithms for common distributed machine learning collectives across arbitrary input network topologies. TACOS was able to synthesize All-Reduce algorithm for a heterogeneous 512-NPU system in just 6.09 minutes while achieving performance improvement up to 4.27x over state-of-the-art prior work. TACOS exhibits high scalability, with synthesis time scaling quadratically with the number of NPUs. In contrast to prior works' NP-hard approaches, TACOS with 40K NPUs completes in 2.52 hours.
Read more4/1/2024
0
TACOS: Task Agnostic Continual Learning in Spiking Neural Networks
Nicholas Soures, Peter Helfer, Anurag Daram, Tej Pandit, Dhireesha Kudithipudi
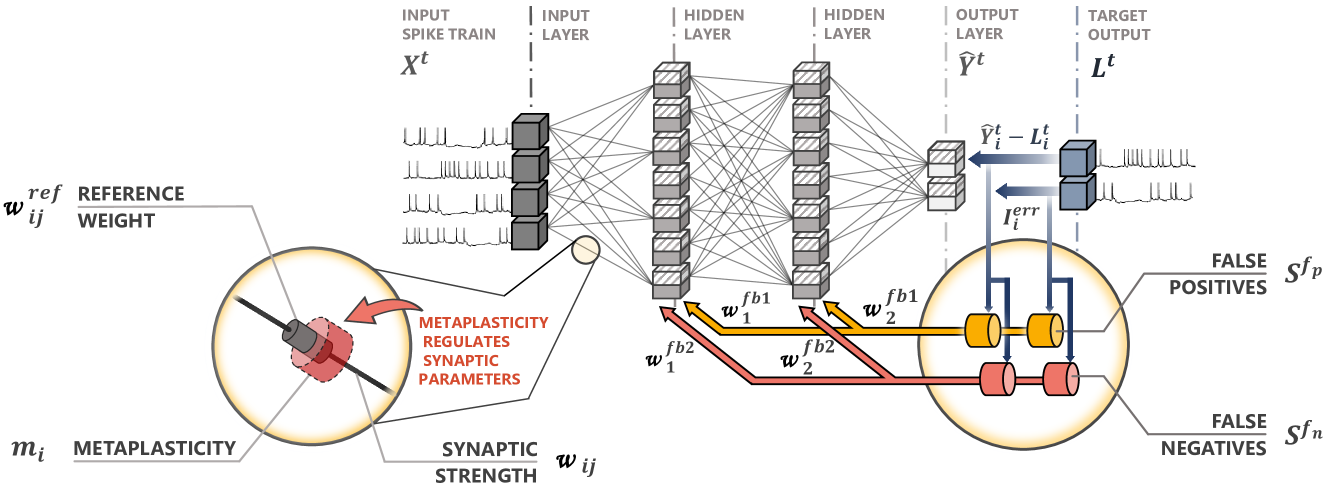
Catastrophic interference, the loss of previously learned information when learning new information, remains a major challenge in machine learning. Since living organisms do not seem to suffer from this problem, researchers have taken inspiration from biology to improve memory retention in artificial intelligence systems. However, previous attempts to use bio-inspired mechanisms have typically resulted in systems that rely on task boundary information during training and/or explicit task identification during inference, information that is not available in real-world scenarios. Here, we show that neuro-inspired mechanisms such as synaptic consolidation and metaplasticity can mitigate catastrophic interference in a spiking neural network, using only synapse-local information, with no need for task awareness, and with a fixed memory size that does not need to be increased when training on new tasks. Our model, TACOS, combines neuromodulation with complex synaptic dynamics to enable new learning while protecting previous information. We evaluate TACOS on sequential image recognition tasks and demonstrate its effectiveness in reducing catastrophic interference. Our results show that TACOS outperforms existing regularization techniques in domain-incremental learning scenarios. We also report the results of an ablation study to elucidate the contribution of each neuro-inspired mechanism separately.
Read more9/4/2024
📶
0
Learning Optimal Topology for Ad-hoc Robot Networks
Matin Macktoobian, Zhan Shu, Qing Zhao
In this paper, we synthesize a data-driven method to predict the optimal topology of an ad-hoc robot network. This problem is technically a multi-task classification problem. However, we divide it into a class of multi-class classification problems that can be more efficiently solved. For this purpose, we first compose an algorithm to create ground-truth optimal topologies associated with various configurations of a robot network. This algorithm incorporates a complex collection of optimality criteria that our learning model successfully manages to learn. This model is an stacked ensemble whose output is the topology prediction for a particular robot. Each stacked ensemble instance constitutes three low-level estimators whose outputs will be aggregated by a high-level boosting blender. Applying our model to a network of 10 robots displays over 80% accuracy in the prediction of optimal topologies corresponding to various configurations of the cited network.
Read more4/8/2024
🔄
0
Efficient Direct-Connect Topologies for Collective Communications
Liangyu Zhao, Siddharth Pal, Tapan Chugh, Weiyang Wang, Jason Fantl, Prithwish Basu, Joud Khoury, Arvind Krishnamurthy
We consider the problem of distilling efficient network topologies for collective communications. We provide an algorithmic framework for constructing direct-connect topologies optimized for the latency vs. bandwidth trade-off associated with the workload. Our approach synthesizes many different topologies and schedules for a given cluster size and degree and then identifies the appropriate topology and schedule for a given workload. Our algorithms start from small, optimal base topologies and associated communication schedules and use techniques that can be iteratively applied to derive much larger topologies and schedules. Additionally, we incorporate well-studied large-scale graph topologies into our algorithmic framework by producing efficient collective schedules for them using a novel polynomial-time algorithm. Our evaluation uses multiple testbeds and large-scale simulations to demonstrate significant performance benefits from our derived topologies and schedules.
Read more5/14/2024