Time-Series JEPA for Predictive Remote Control under Capacity-Limited Networks

0
Sign in to get full access
Overview
• This research paper proposes a new time-series joint embedding and predictive architecture (Time-Series JEPA) for predictive remote control under capacity-limited networks.
Plain English Explanation
• The paper focuses on developing a machine learning system that can predict and control remote devices, even when the network connecting those devices has limited capacity.
• The key idea is to use a "joint embedding" approach, where information about the device, the control commands, and the time-series data are all represented in a shared, low-dimensional space.
• This joint embedding allows the system to learn patterns and make predictions more effectively, even with limited network bandwidth.
• The paper builds on previous work on joint embedding and predictive architectures (JEPA), design choices for JEPA, discriminative masked targets JEPA, and joint embedding with predictive context.
Technical Explanation
• The Time-Series JEPA model takes as input the current state of a remote device, the desired control commands, and historical time-series data about the device's behavior.
• It then learns a joint embedding that represents all this information in a shared low-dimensional space.
• This joint embedding is used to make predictions about the future state of the device, which can then be used to generate appropriate control commands.
• The model is trained end-to-end using a combination of supervised and unsupervised learning techniques, building on the unified replay-based continuous learning framework for spatio-temporal data.
Critical Analysis
• The paper acknowledges that the performance of the Time-Series JEPA model may be limited by the capacity of the network connecting the remote devices.
• It also notes that the model's ability to generalize to new types of devices or control tasks is an area for further research.
• One potential concern is the complexity of the overall system, which combines several advanced machine learning techniques. This could make it challenging to deploy and maintain in real-world settings.
Conclusion
• The Time-Series JEPA model represents a promising approach for enabling predictive remote control in capacity-limited networks.
• By leveraging joint embeddings and advanced learning techniques, the model can make accurate predictions and generate appropriate control commands, even with limited network resources.
• Further research is needed to address the model's limitations and explore its broader applicability, but this work represents an important step forward in the field of remote control and edge computing.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Time-Series JEPA for Predictive Remote Control under Capacity-Limited Networks
Abanoub M. Girgis, Alvaro Valcarce, Mehdi Bennis
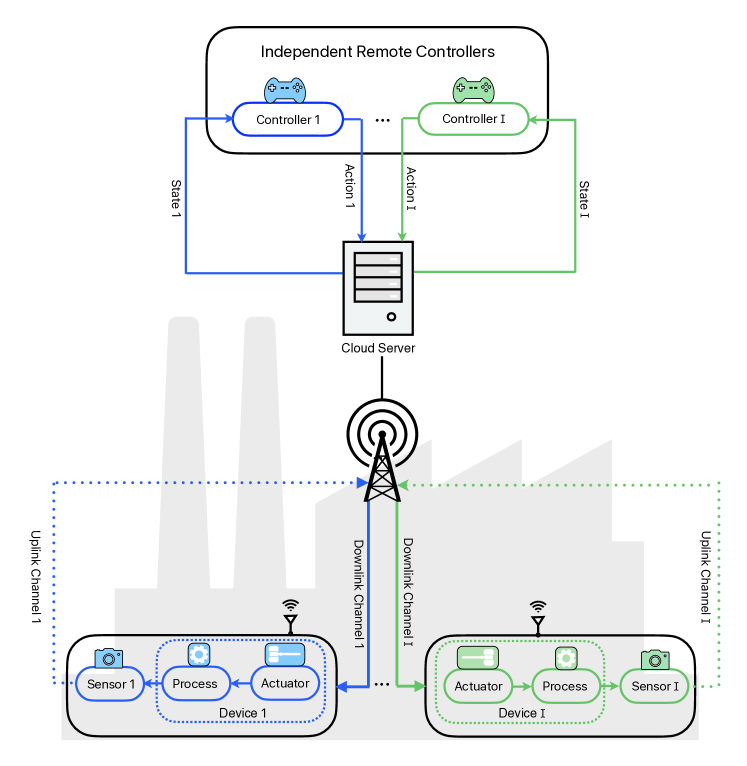
In remote control systems, transmitting large data volumes (e.g. video feeds) from wireless sensors to faraway controllers is challenging when the uplink channel capacity is limited (e.g. RedCap devices or massive wireless sensor networks). Furthermore, the controllers often only need the information-rich components of the original data. To address this, we propose a Time-Series Joint Embedding Predictive Architecture (TS-JEPA) and a semantic actor trained through self-supervised learning. This approach harnesses TS-JEPA's semantic representation power and predictive capabilities by capturing spatio-temporal correlations in the source data. We leverage this to optimize uplink channel utilization, while the semantic actor calculates control commands directly from the encoded representations, rather than from the original data. We test our model through multiple parallel instances of the well-known inverted cart-pole scenario, where the approach is validated through the maximization of stability under constrained uplink channel capacity.
Read more6/10/2024

0
T-JEPA: A Joint-Embedding Predictive Architecture for Trajectory Similarity Computation
Lihuan Li, Hao Xue, Yang Song, Flora Salim
Trajectory similarity computation is an essential technique for analyzing moving patterns of spatial data across various applications such as traffic management, wildlife tracking, and location-based services. Modern methods often apply deep learning techniques to approximate heuristic metrics but struggle to learn more robust and generalized representations from the vast amounts of unlabeled trajectory data. Recent approaches focus on self-supervised learning methods such as contrastive learning, which have made significant advancements in trajectory representation learning. However, contrastive learning-based methods heavily depend on manually pre-defined data augmentation schemes, limiting the diversity of generated trajectories and resulting in learning from such variations in 2D Euclidean space, which prevents capturing high-level semantic variations. To address these limitations, we propose T-JEPA, a self-supervised trajectory similarity computation method employing Joint-Embedding Predictive Architecture (JEPA) to enhance trajectory representation learning. T-JEPA samples and predicts trajectory information in representation space, enabling the model to infer the missing components of trajectories at high-level semantics without relying on domain knowledge or manual effort. Extensive experiments conducted on three urban trajectory datasets and two Foursquare datasets demonstrate the effectiveness of T-JEPA in trajectory similarity computation.
Read more6/21/2024
🤷
0
Point-JEPA: A Joint Embedding Predictive Architecture for Self-Supervised Learning on Point Cloud
Ayumu Saito, Jiju Poovvancheri
Recent advancements in self-supervised learning in the point cloud domain have demonstrated significant potential. However, these methods often suffer from drawbacks, including lengthy pre-training time, the necessity of reconstruction in the input space, or the necessity of additional modalities. In order to address these issues, we introduce Point-JEPA, a joint embedding predictive architecture designed specifically for point cloud data. To this end, we introduce a sequencer that orders point cloud tokens to efficiently compute and utilize tokens proximity based on their indices during target and context selection. The sequencer also allows shared computations of the tokens proximity between context and target selection, further improving the efficiency. Experimentally, our method achieves competitive results with state-of-the-art methods while avoiding the reconstruction in the input space or additional modality.
Read more7/19/2024

0
Graph-level Representation Learning with Joint-Embedding Predictive Architectures
Geri Skenderi, Hang Li, Jiliang Tang, Marco Cristani
Joint-Embedding Predictive Architectures (JEPAs) have recently emerged as a novel and powerful technique for self-supervised representation learning. They aim to learn an energy-based model by predicting the latent representation of a target signal y from the latent representation of a context signal x. JEPAs bypass the need for negative and positive samples, traditionally required by contrastive learning while avoiding the overfitting issues associated with generative pretraining. In this paper, we show that graph-level representations can be effectively modeled using this paradigm by proposing a Graph Joint-Embedding Predictive Architecture (Graph-JEPA). In particular, we employ masked modeling and focus on predicting the latent representations of masked subgraphs starting from the latent representation of a context subgraph. To endow the representations with the implicit hierarchy that is often present in graph-level concepts, we devise an alternative prediction objective that consists of predicting the coordinates of the encoded subgraphs on the unit hyperbola in the 2D plane. Through multiple experimental evaluations, we show that Graph-JEPA can learn highly semantic and expressive representations, as shown by the downstream performance in graph classification, regression, and distinguishing non-isomorphic graphs. The code will be made available upon acceptance.
Read more6/26/2024