TorchSpatial: A Location Encoding Framework and Benchmark for Spatial Representation Learning
2406.15658
0
0
Abstract
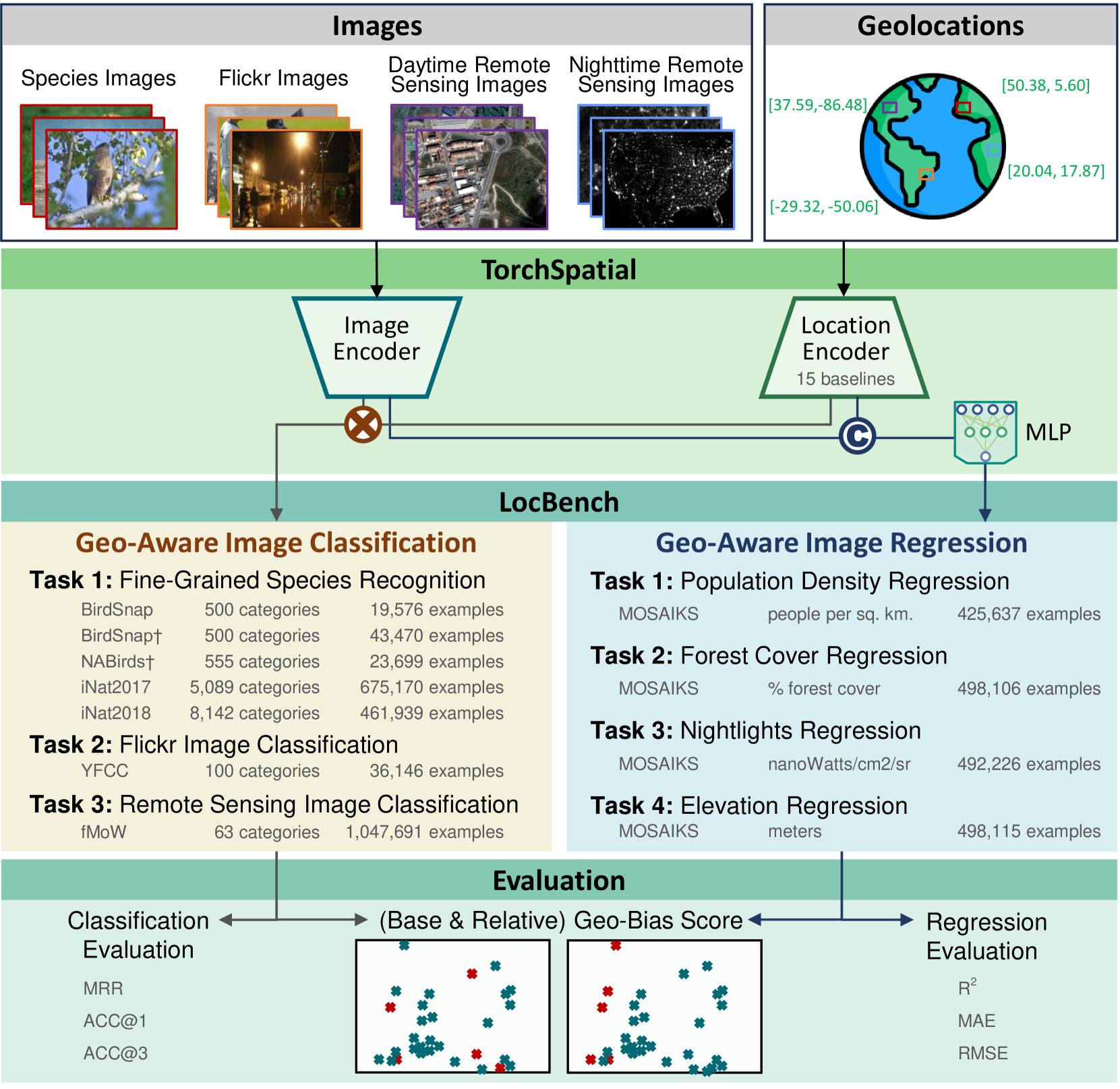
Spatial representation learning (SRL) aims at learning general-purpose neural network representations from various types of spatial data (e.g., points, polylines, polygons, networks, images, etc.) in their native formats. Learning good spatial representations is a fundamental problem for various downstream applications such as species distribution modeling, weather forecasting, trajectory generation, geographic question answering, etc. Even though SRL has become the foundation of almost all geospatial artificial intelligence (GeoAI) research, we have not yet seen significant efforts to develop an extensive deep learning framework and benchmark to support SRL model development and evaluation. To fill this gap, we propose TorchSpatial, a learning framework and benchmark for location (point) encoding, which is one of the most fundamental data types of spatial representation learning. TorchSpatial contains three key components: 1) a unified location encoding framework that consolidates 15 commonly recognized location encoders, ensuring scalability and reproducibility of the implementations; 2) the LocBench benchmark tasks encompassing 7 geo-aware image classification and 4 geo-aware image regression datasets; 3) a comprehensive suite of evaluation metrics to quantify geo-aware models' overall performance as well as their geographic bias, with a novel Geo-Bias Score metric. Finally, we provide a detailed analysis and insights into the model performance and geographic bias of different location encoders. We believe TorchSpatial will foster future advancement of spatial representation learning and spatial fairness in GeoAI research. The TorchSpatial model framework, LocBench, and Geo-Bias Score evaluation framework are available at https://github.com/seai-lab/TorchSpatial.
Create account to get full access
Overview
- This paper introduces a new location encoding framework called \package that can represent spatial locations in a compact and efficient way.
- \package uses spherical harmonics and sinusoidal functions to encode locations on a 2D plane or the surface of a sphere, allowing for effective learning and reasoning about spatial relationships.
- The authors also present a new benchmark dataset called EmbSpatial for evaluating spatial representation learning models.
Plain English Explanation
The paper describes a new way to represent the location of objects in space using a method called \package. This is important for helping AI systems understand and reason about the spatial relationships between things.
The \package approach uses mathematical functions called spherical harmonics and sine waves to encode the location of an object on a flat surface or on the surface of a sphere. This allows the location to be represented in a very compact and efficient way, which is useful for training AI models to learn about spatial concepts.
To help evaluate how well different AI models can understand spatial relationships, the researchers also created a new benchmark dataset called EmbSpatial. This dataset provides a standard way to test the spatial reasoning capabilities of AI systems by having them complete various tasks related to understanding the locations and movements of objects in a virtual environment.
Overall, this work aims to advance the field of spatial representation learning, which is important for enabling AI systems to better perceive, reason about, and interact with the physical world around them. By providing a new encoding framework and a standardized benchmark, the researchers hope to spur further progress in this area of AI.
Technical Explanation
The paper introduces a new location encoding framework called \package that can efficiently represent spatial locations using spherical harmonics and sinusoidal functions. This allows for compact encoding of locations on a 2D plane or the surface of a sphere.
The \package approach works by decomposing the 2D or 3D spatial coordinates into frequency-based components using spherical harmonic and sinusoidal functions. This enables the spatial information to be represented in a low-dimensional latent space, which is advantageous for training machine learning models to learn and reason about spatial relationships.
To evaluate the effectiveness of \package and other spatial representation learning techniques, the authors also present a new benchmark dataset called EmbSpatial. EmbSpatial consists of a series of spatial reasoning tasks set in a virtual 3D environment, including object localization, path planning, and navigation challenges. This dataset provides a standardized way to assess the spatial understanding capabilities of AI models.
The authors demonstrate the effectiveness of \package by using it to train models on the EmbSpatial benchmark, as well as other spatial reasoning tasks such as reframing spatial reasoning evaluation and generating spatial paths. They show that \package outperforms alternative encoding methods and enables more robust spatial reasoning abilities.
Critical Analysis
The \package framework and EmbSpatial benchmark presented in this paper represent a promising step forward in the field of spatial representation learning. The use of spherical harmonics and sinusoidal functions to compactly encode spatial locations is a novel and effective approach.
However, the paper does not address some potential limitations of the \package method. For example, it is unclear how well the encoding would scale to larger or more complex spatial environments, or how robust it would be to noisy or incomplete sensor data. Additionally, while the EmbSpatial benchmark provides a useful standardized evaluation, it may not fully capture the breadth of spatial reasoning required for real-world applications.
Further research is also needed to explore the interpretability and explainability of the spatial representations learned by \package-based models. Understanding how these models reason about spatial relationships could unlock new insights and applications.
Despite these potential areas for improvement, the overall contributions of this work, including the new encoding framework and benchmark dataset, are significant and could spur important advancements in the field of spatial AI. Researchers and developers working on problems involving spatial reasoning and understanding would benefit from carefully considering the insights and techniques presented in this paper.
Conclusion
The \package location encoding framework and EmbSpatial benchmark introduced in this paper represent an important advancement in the field of spatial representation learning. By providing a compact and efficient way to encode spatial locations using spherical harmonics and sinusoidal functions, \package enables more robust and effective spatial reasoning in AI systems.
The EmbSpatial dataset further supports progress in this area by offering a standardized way to evaluate the spatial understanding capabilities of different models and approaches. This could lead to significant improvements in the ability of AI systems to perceive, reason about, and interact with the physical world around them.
Overall, this work lays the groundwork for more advanced spatial AI applications, from robotics and navigation to augmented reality and beyond. As the field continues to evolve, the insights and techniques presented in this paper are likely to have a lasting impact on the development of intelligent systems that can effectively navigate and understand the spatial dimensions of our environment.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
Geographic Location Encoding with Spherical Harmonics and Sinusoidal Representation Networks
Marc Ru{ss}wurm, Konstantin Klemmer, Esther Rolf, Robin Zbinden, Devis Tuia
0
0
Learning representations of geographical space is vital for any machine learning model that integrates geolocated data, spanning application domains such as remote sensing, ecology, or epidemiology. Recent work embeds coordinates using sine and cosine projections based on Double Fourier Sphere (DFS) features. These embeddings assume a rectangular data domain even on global data, which can lead to artifacts, especially at the poles. At the same time, little attention has been paid to the exact design of the neural network architectures with which these functional embeddings are combined. This work proposes a novel location encoder for globally distributed geographic data that combines spherical harmonic basis functions, natively defined on spherical surfaces, with sinusoidal representation networks (SirenNets) that can be interpreted as learned Double Fourier Sphere embedding. We systematically evaluate positional embeddings and neural network architectures across various benchmarks and synthetic evaluation datasets. In contrast to previous approaches that require the combination of both positional encoding and neural networks to learn meaningful representations, we show that both spherical harmonics and sinusoidal representation networks are competitive on their own but set state-of-the-art performances across tasks when combined. The model code and experiments are available at https://github.com/marccoru/locationencoder.
4/16/2024

EmbSpatial-Bench: Benchmarking Spatial Understanding for Embodied Tasks with Large Vision-Language Models
Mengfei Du, Binhao Wu, Zejun Li, Xuanjing Huang, Zhongyu Wei
0
0
The recent rapid development of Large Vision-Language Models (LVLMs) has indicated their potential for embodied tasks.However, the critical skill of spatial understanding in embodied environments has not been thoroughly evaluated, leaving the gap between current LVLMs and qualified embodied intelligence unknown. Therefore, we construct EmbSpatial-Bench, a benchmark for evaluating embodied spatial understanding of LVLMs.The benchmark is automatically derived from embodied scenes and covers 6 spatial relationships from an egocentric perspective.Experiments expose the insufficient capacity of current LVLMs (even GPT-4V). We further present EmbSpatial-SFT, an instruction-tuning dataset designed to improve LVLMs' embodied spatial understanding.
6/11/2024
Reframing Spatial Reasoning Evaluation in Language Models: A Real-World Simulation Benchmark for Qualitative Reasoning
Fangjun Li, David C. Hogg, Anthony G. Cohn
0
0
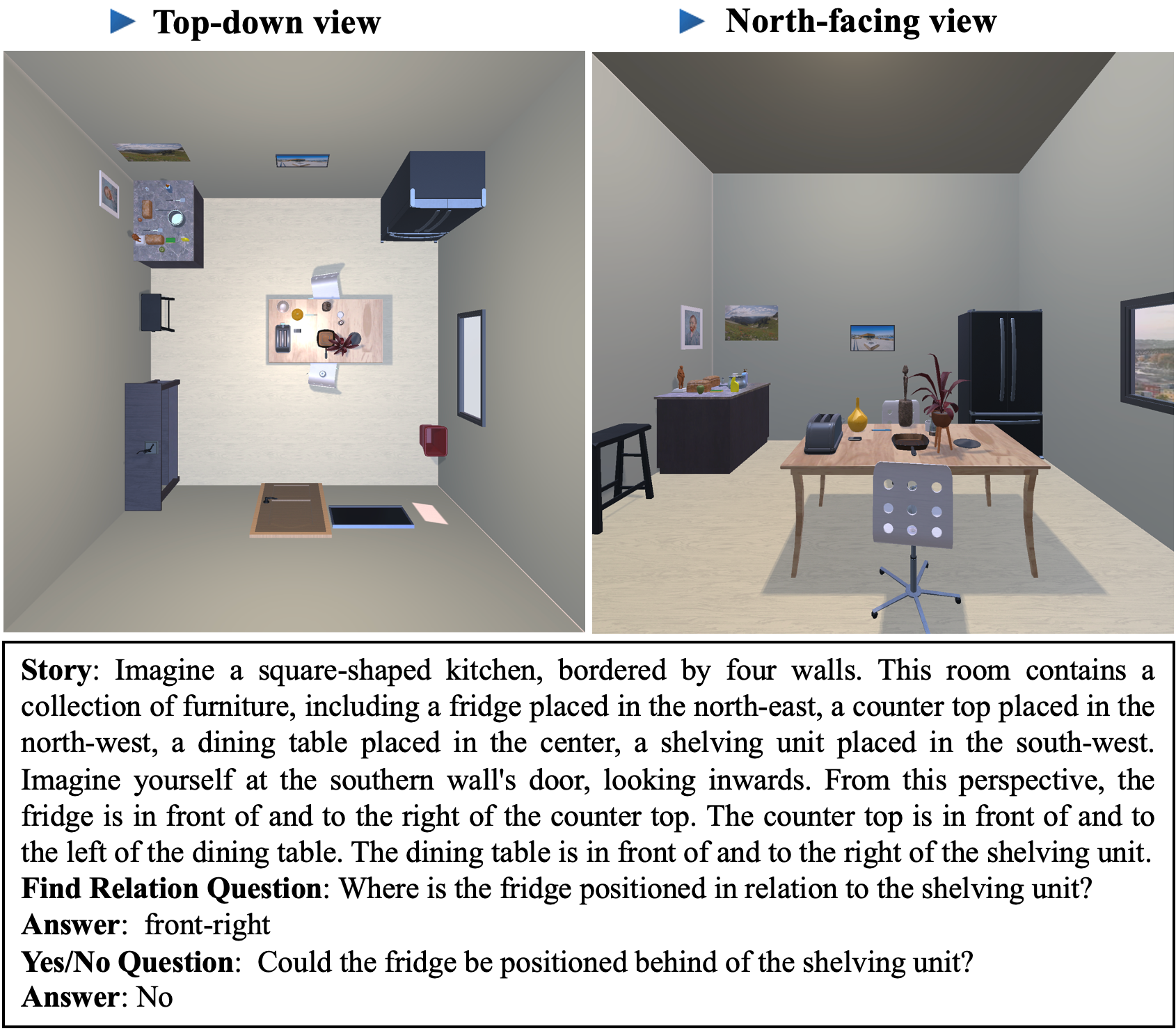
Spatial reasoning plays a vital role in both human cognition and machine intelligence, prompting new research into language models' (LMs) capabilities in this regard. However, existing benchmarks reveal shortcomings in evaluating qualitative spatial reasoning (QSR). These benchmarks typically present oversimplified scenarios or unclear natural language descriptions, hindering effective evaluation. We present a novel benchmark for assessing QSR in LMs, which is grounded in realistic 3D simulation data, offering a series of diverse room layouts with various objects and their spatial relationships. This approach provides a more detailed and context-rich narrative for spatial reasoning evaluation, diverging from traditional, toy-task-oriented scenarios. Our benchmark encompasses a broad spectrum of qualitative spatial relationships, including topological, directional, and distance relations. These are presented with different viewing points, varied granularities, and density of relation constraints to mimic real-world complexities. A key contribution is our logic-based consistency-checking tool, which enables the assessment of multiple plausible solutions, aligning with real-world scenarios where spatial relationships are often open to interpretation. Our benchmark evaluation of advanced LMs reveals their strengths and limitations in spatial reasoning. They face difficulties with multi-hop spatial reasoning and interpreting a mix of different view descriptions, pointing to areas for future improvement.
5/27/2024

SpaRC and SpaRP: Spatial Reasoning Characterization and Path Generation for Understanding Spatial Reasoning Capability of Large Language Models
Md Imbesat Hassan Rizvi, Xiaodan Zhu, Iryna Gurevych
0
0
Spatial reasoning is a crucial component of both biological and artificial intelligence. In this work, we present a comprehensive study of the capability of current state-of-the-art large language models (LLMs) on spatial reasoning. To support our study, we created and contribute a novel Spatial Reasoning Characterization (SpaRC) framework and Spatial Reasoning Paths (SpaRP) datasets, to enable an in-depth understanding of the spatial relations and compositions as well as the usefulness of spatial reasoning chains. We found that all the state-of-the-art LLMs do not perform well on the datasets -- their performances are consistently low across different setups. The spatial reasoning capability improves substantially as model sizes scale up. Finetuning both large language models (e.g., Llama-2-70B) and smaller ones (e.g., Llama-2-13B) can significantly improve their F1-scores by 7--32 absolute points. We also found that the top proprietary LLMs still significantly outperform their open-source counterparts in topological spatial understanding and reasoning.
6/10/2024