Training on the Fly: On-device Self-supervised Learning aboard Nano-drones within 20 mW

0

Sign in to get full access
Overview
- This paper presents a novel approach for enabling on-device self-supervised learning on resource-constrained nano-drones.
- The authors demonstrate the ability to train deep neural networks on-board these nano-drones while consuming less than 20 milliwatts of power.
- This allows the drones to continuously adapt and improve their capabilities through self-supervised learning, even in remote or inaccessible environments.
Plain English Explanation
The paper describes a way to enable on-device self-supervised learning on tiny, power-constrained drone platforms called nano-drones. These nano-drones can learn and improve their own skills on-the-fly, without relying on a connection to a powerful external computer.
Typically, training complex machine learning models requires a lot of computing power and energy. But the authors have found a way to distill these models down to a size and power footprint that allows them to run on the nano-drones, consuming less than 20 milliwatts.
This is a significant breakthrough, as it means the nano-drones can continuously adapt and improve their abilities through self-supervised learning, even when operating in remote or hard-to-access environments where they may not have a reliable connection to the cloud or a central server. The drones can essentially "train on the fly" to enhance their perception, navigation, and other key capabilities.
Technical Explanation
The core innovation of this work is the development of a TinyML framework that enables efficient on-device self-supervised learning on nano-drones. The authors leverage techniques like model distillation, sparse training, and custom neural network architectures to create models that can run on the limited computational and energy resources of nano-drones.
The proposed system consists of several key components:
- Nano-drone hardware: The authors use a custom nano-drone platform with a low-power microcontroller, sensors, and minimal onboard storage/compute capabilities.
- Self-supervised learning: The nano-drones employ self-supervised learning techniques to continuously adapt their neural network models without the need for human-labeled data. This allows them to learn and improve autonomously.
- On-device training: The authors develop efficient optimization and training algorithms that can execute the self-supervised learning process directly on the nano-drone hardware, consuming less than 20 milliwatts of power.
Through extensive experiments, the researchers demonstrate the feasibility and effectiveness of their approach. They show that the nano-drones can maintain high-performance on key tasks like object detection and navigation, while adapting their models in real-time to handle dynamic environments and new situations.
Critical Analysis
The authors have made a significant contribution by pushing the boundaries of what is possible with embedded machine learning on resource-constrained platforms. Their ability to enable on-device self-supervised learning on nano-drones is an impressive technical feat.
However, the paper does not deeply explore some of the potential limitations and challenges of this approach. For example, it's unclear how the self-supervised learning process impacts the long-term stability and reliability of the nano-drone's behavior, especially in safety-critical applications. Additionally, the authors don't address potential security and privacy concerns that may arise from having unconstrained on-device learning capabilities.
Further research could explore techniques to ensure the self-supervised learning process remains bounded and predictable, and to incorporate mechanisms for secure and privacy-preserving on-device adaptation. Investigating the transferability of the learned models to other nano-drone platforms or edge devices could also be a fruitful area of exploration.
Conclusion
This paper presents a groundbreaking approach for enabling on-device self-supervised learning on nano-drones, a class of resource-constrained embedded platforms. By developing efficient machine learning techniques that can run on the limited computational and energy resources of these nano-drones, the authors have opened up new possibilities for autonomous adaptation and continuous improvement in remote and inaccessible environments.
The implications of this work extend beyond nano-drones, as the principles and techniques could be applied to a wide range of edge computing and TinyML applications, enabling intelligent, self-aware systems that can learn and adapt on their own, even in challenging conditions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Training on the Fly: On-device Self-supervised Learning aboard Nano-drones within 20 mW
Elia Cereda, Alessandro Giusti, Daniele Palossi
Miniaturized cyber-physical systems (CPSes) powered by tiny machine learning (TinyML), such as nano-drones, are becoming an increasingly attractive technology. Their small form factor (i.e., ~10cm diameter) ensures vast applicability, ranging from the exploration of narrow disaster scenarios to safe human-robot interaction. Simple electronics make these CPSes inexpensive, but strongly limit the computational, memory, and sensing resources available on board. In real-world applications, these limitations are further exacerbated by domain shift. This fundamental machine learning problem implies that model perception performance drops when moving from the training domain to a different deployment one. To cope with and mitigate this general problem, we present a novel on-device fine-tuning approach that relies only on the limited ultra-low power resources available aboard nano-drones. Then, to overcome the lack of ground-truth training labels aboard our CPS, we also employ a self-supervised method based on ego-motion consistency. Albeit our work builds on top of a specific real-world vision-based human pose estimation task, it is widely applicable for many embedded TinyML use cases. Our 512-image on-device training procedure is fully deployed aboard an ultra-low power GWT GAP9 System-on-Chip and requires only 1MB of memory while consuming as low as 19mW or running in just 510ms (at 38mW). Finally, we demonstrate the benefits of our on-device learning approach by field-testing our closed-loop CPS, showing a reduction in horizontal position error of up to 26% vs. a non-fine-tuned state-of-the-art baseline. In the most challenging never-seen-before environment, our on-device learning procedure makes the difference between succeeding or failing the mission.
Read more8/7/2024
🤿
0
A Deep Learning-based Pest Insect Monitoring System for Ultra-low Power Pocket-sized Drones
Luca Crupi, Luca Butera, Alberto Ferrante, Daniele Palossi
Smart farming and precision agriculture represent game-changer technologies for efficient and sustainable agribusiness. Miniaturized palm-sized drones can act as flexible smart sensors inspecting crops, looking for early signs of potential pest outbreaking. However, achieving such an ambitious goal requires hardware-software codesign to develop accurate deep learning (DL) detection models while keeping memory and computational needs under an ultra-tight budget, i.e., a few MB on-chip memory and a few 100s mW power envelope. This work presents a novel vertically integrated solution featuring two ultra-low power System-on-Chips (SoCs), i.e., the dual-core STM32H74 and a multi-core GWT GAP9, running two State-of-the-Art DL models for detecting the Popillia japonica bug. We fine-tune both models for our image-based detection task, quantize them in 8-bit integers, and deploy them on the two SoCs. On the STM32H74, we deploy a FOMO-MobileNetV2 model, achieving a mean average precision (mAP) of 0.66 and running at 16.1 frame/s within 498 mW. While on the GAP9 SoC, we deploy a more complex SSDLite-MobileNetV3, which scores an mAP of 0.79 and peaks at 6.8 frame/s within 33 mW. Compared to a top-notch RetinaNet-ResNet101-FPN full-precision baseline, which requires 14.9x more memory and 300x more operations per inference, our best model drops only 15% in mAP, paving the way toward autonomous palm-sized drones capable of lightweight and precise pest detection.
Read more7/2/2024
0
Fusing Multi-sensor Input with State Information on TinyML Brains for Autonomous Nano-drones
Luca Crupi, Elia Cereda, Daniele Palossi
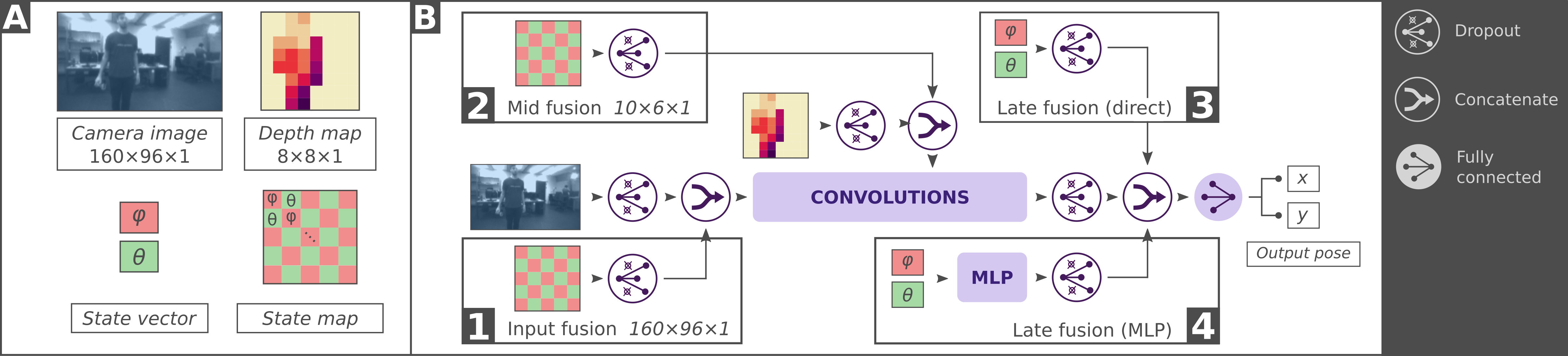
Autonomous nano-drones (~10 cm in diameter), thanks to their ultra-low power TinyML-based brains, are capable of coping with real-world environments. However, due to their simplified sensors and compute units, they are still far from the sense-and-act capabilities shown in their bigger counterparts. This system paper presents a novel deep learning-based pipeline that fuses multi-sensorial input (i.e., low-resolution images and 8x8 depth map) with the robot's state information to tackle a human pose estimation task. Thanks to our design, the proposed system -- trained in simulation and tested on a real-world dataset -- improves a state-unaware State-of-the-Art baseline by increasing the R^2 regression metric up to 0.10 on the distance's prediction.
Read more4/4/2024

0
Distilling Tiny and Ultra-fast Deep Neural Networks for Autonomous Navigation on Nano-UAVs
Lorenzo Lamberti, Lorenzo Bellone, Luka Macan, Enrico Natalizio, Francesco Conti, Daniele Palossi, Luca Benini
Nano-sized unmanned aerial vehicles (UAVs) are ideal candidates for flying Internet-of-Things smart sensors to collect information in narrow spaces. This requires ultra-fast navigation under very tight memory/computation constraints. The PULP-Dronet convolutional neural network (CNN) enables autonomous navigation running aboard a nano-UAV at 19 frame/s, at the cost of a large memory footprint of 320 kB -- and with drone control in complex scenarios hindered by the disjoint training of collision avoidance and steering capabilities. In this work, we distill a novel family of CNNs with better capabilities than PULP-Dronet, but memory footprint reduced by up to 168x (down to 2.9 kB), achieving an inference rate of up to 139 frame/s; we collect a new open-source unified collision/steering 66 k images dataset for more robust navigation; and we perform a thorough in-field analysis of both PULP-Dronet and our tiny CNNs running on a commercially available nano-UAV. Our tiniest CNN, called Tiny-PULP-Dronet v3, navigates with a 100% success rate a challenging and never-seen-before path, composed of a narrow obstacle-populated corridor and a 180{deg} turn, at a maximum target speed of 0.5 m/s. In the same scenario, the SoA PULP-Dronet consistently fails despite having 168x more parameters.
Read more7/18/2024