Ultrafast vision perception by neuromorphic optical flow

0
👀
Sign in to get full access
Overview
- Optical flow is crucial for robotic visual perception, but current 2D methods have limitations.
- This paper introduces a 3D neuromorphic optical flow method that leverages memristors to improve motion cues and accelerate visual data processing.
- The approach reduces processing time by 0.3 seconds on average while maintaining or improving accuracy in tasks like object tracking and segmentation.
Plain English Explanation
The paper describes a new way to track movement and motion in 3D using a special type of hardware called memristors. Current methods for tracking movement, known as optical flow, typically only work in 2D, meaning they can only measure movement in the left-right and up-down directions. This limits their ability to fully understand the movement happening in a scene, such as missing important details or taking a long time to process high volumes of visual data.
The 3D neuromorphic optical flow method in this paper overcomes these limitations by directly embedding motion features into the hardware using memristors. This allows the system to better capture the full 3D movement happening, leading to faster and more accurate motion prediction, object tracking, and object segmentation. For example, the approach can reduce visual data processing time by 0.3 seconds on average compared to previous methods, while maintaining or even improving the accuracy of these key robotic perception tasks.
This advance opens up new possibilities for how robots can use vision to understand and interact with the world around them, without having to compromise between accuracy and efficiency.
Technical Explanation
The paper presents a 3D neuromorphic optical flow method that leverages the time-domain processing capability of memristors to directly embed external motion features into hardware. This overcomes the limitations of current 2D optical flow approaches, which only capture movement in horizontal and vertical dimensions, leading to incomplete motion cues and delays in processing high-volume visual data.
The proposed 3D optical flow algorithm is implemented in a neuromorphic architecture, allowing it to dramatically accelerate the computation of movement velocities and subsequent task-specific algorithms like object tracking and object segmentation. In experiments, this reduces visual data processing time by an average of 0.3 seconds while maintaining or improving accuracy.
The flexibility of the neuromorphic optical flow approach also enables seamless integration with existing algorithms, ensuring broad applicability across robotic perception tasks.
Critical Analysis
The paper thoroughly demonstrates the advantages of the 3D neuromorphic optical flow method over traditional 2D approaches. However, the experiments are primarily focused on specific robotic perception tasks like object tracking and segmentation. Further research may be needed to evaluate the method's performance and generalizability across a wider range of applications and real-world scenarios.
Additionally, the paper does not provide detailed information about the power consumption or hardware requirements of the neuromorphic architecture. These practical considerations would be important for assessing the method's suitability for deployment on resource-constrained robotic platforms.
Conclusion
This paper presents a promising 3D neuromorphic optical flow approach that can dramatically improve the speed and accuracy of robotic visual perception tasks compared to existing 2D methods. By directly embedding motion features into memristor-based hardware, the system is able to better capture 3D movement and accelerate subsequent processing. These advancements open up new possibilities for how robots can leverage vision to understand and interact with their surroundings in real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👀
0
Ultrafast vision perception by neuromorphic optical flow
Shengbo Wang, Shuo Gao, Tongming Pu, Liangbing Zhao, Arokia Nathan
Optical flow is crucial for robotic visual perception, yet current methods primarily operate in a 2D format, capturing movement velocities only in horizontal and vertical dimensions. This limitation results in incomplete motion cues, such as missing regions of interest or detailed motion analysis of different regions, leading to delays in processing high-volume visual data in real-world settings. Here, we report a 3D neuromorphic optical flow method that leverages the time-domain processing capability of memristors to embed external motion features directly into hardware, thereby completing motion cues and dramatically accelerating the computation of movement velocities and subsequent task-specific algorithms. In our demonstration, this approach reduces visual data processing time by an average of 0.3 seconds while maintaining or improving the accuracy of motion prediction, object tracking, and object segmentation. Interframe visual processing is achieved for the first time in UAV scenarios. Furthermore, the neuromorphic optical flow algorithm's flexibility allows seamless integration with existing algorithms, ensuring broad applicability. These advancements open unprecedented avenues for robotic perception, without the trade-off between accuracy and efficiency.
Read more9/25/2024
0
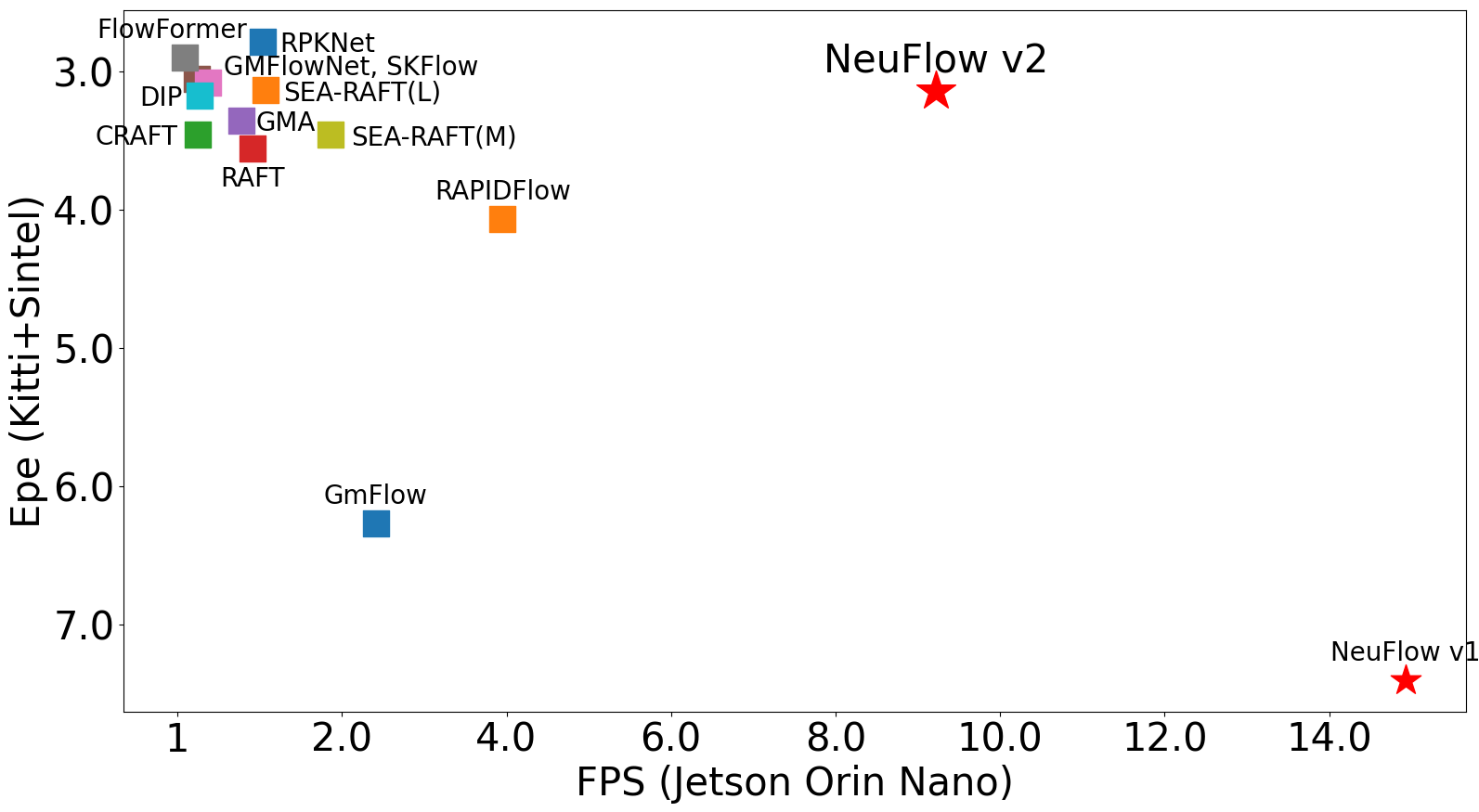
NeuFlow v2: High-Efficiency Optical Flow Estimation on Edge Devices
Zhiyong Zhang, Aniket Gupta, Huaizu Jiang, Hanumant Singh
Real-time high-accuracy optical flow estimation is crucial for various real-world applications. While recent learning-based optical flow methods have achieved high accuracy, they often come with significant computational costs. In this paper, we propose a highly efficient optical flow method that balances high accuracy with reduced computational demands. Building upon NeuFlow v1, we introduce new components including a much more light-weight backbone and a fast refinement module. Both these modules help in keeping the computational demands light while providing close to state of the art accuracy. Compares to other state of the art methods, our model achieves a 10x-70x speedup while maintaining comparable performance on both synthetic and real-world data. It is capable of running at over 20 FPS on 512x384 resolution images on a Jetson Orin Nano. The full training and evaluation code is available at https://github.com/neufieldrobotics/NeuFlow_v2.
Read more8/23/2024
🔮
0
MemFlow: Optical Flow Estimation and Prediction with Memory
Qiaole Dong, Yanwei Fu
Optical flow is a classical task that is important to the vision community. Classical optical flow estimation uses two frames as input, whilst some recent methods consider multiple frames to explicitly model long-range information. The former ones limit their ability to fully leverage temporal coherence along the video sequence; and the latter ones incur heavy computational overhead, typically not possible for real-time flow estimation. Some multi-frame-based approaches even necessitate unseen future frames for current estimation, compromising real-time applicability in safety-critical scenarios. To this end, we present MemFlow, a real-time method for optical flow estimation and prediction with memory. Our method enables memory read-out and update modules for aggregating historical motion information in real-time. Furthermore, we integrate resolution-adaptive re-scaling to accommodate diverse video resolutions. Besides, our approach seamlessly extends to the future prediction of optical flow based on past observations. Leveraging effective historical motion aggregation, our method outperforms VideoFlow with fewer parameters and faster inference speed on Sintel and KITTI-15 datasets in terms of generalization performance. At the time of submission, MemFlow also leads in performance on the 1080p Spring dataset. Codes and models will be available at: https://dqiaole.github.io/MemFlow/.
Read more4/9/2024

0
Optical Flow Matters: an Empirical Comparative Study on Fusing Monocular Extracted Modalities for Better Steering
Fouad Makiyeh, Mark Bastourous, Anass Bairouk, Wei Xiao, Mirjana Maras, Tsun-Hsuan Wangb, Marc Blanchon, Ramin Hasani, Patrick Chareyre, Daniela Rus
Autonomous vehicle navigation is a key challenge in artificial intelligence, requiring robust and accurate decision-making processes. This research introduces a new end-to-end method that exploits multimodal information from a single monocular camera to improve the steering predictions for self-driving cars. Unlike conventional models that require several sensors which can be costly and complex or rely exclusively on RGB images that may not be robust enough under different conditions, our model significantly improves vehicle steering prediction performance from a single visual sensor. By focusing on the fusion of RGB imagery with depth completion information or optical flow data, we propose a comprehensive framework that integrates these modalities through both early and hybrid fusion techniques. We use three distinct neural network models to implement our approach: Convolution Neural Network - Neutral Circuit Policy (CNN-NCP) , Variational Auto Encoder - Long Short-Term Memory (VAE-LSTM) , and Neural Circuit Policy architecture VAE-NCP. By incorporating optical flow into the decision-making process, our method significantly advances autonomous navigation. Empirical results from our comparative study using Boston driving data show that our model, which integrates image and motion information, is robust and reliable. It outperforms state-of-the-art approaches that do not use optical flow, reducing the steering estimation error by 31%. This demonstrates the potential of optical flow data, combined with advanced neural network architectures (a CNN-based structure for fusing data and a Recurrence-based network for inferring a command from latent space), to enhance the performance of autonomous vehicles steering estimation.
Read more9/20/2024