Uncertainty-aware Semantic Mapping in Off-road Environments with Dempster-Shafer Theory of Evidence

0
Sign in to get full access
Overview
- This paper presents a novel approach for uncertainty-aware semantic mapping in off-road environments using the Dempster-Shafer theory of evidence.
- The proposed method aims to address the challenges of navigating complex, unstructured off-road terrains where traditional mapping techniques may be insufficient.
- By incorporating uncertainty modeling and evidential fusion, the system can better handle ambiguity and produce more accurate semantic maps of the environment.
Plain English Explanation
Navigating off-road environments, such as rugged terrain or forests, can be challenging for autonomous systems like self-driving cars or robots. Traditional mapping techniques may struggle to capture the complexity and uncertainty of these environments.
The researchers in this paper developed a new approach that uses the Dempster-Shafer theory of evidence to create "uncertainty-aware" semantic maps. This means the system can model and account for the uncertainty inherent in off-road sensor data, rather than just assuming everything is known with certainty.
By fusing different sources of evidence (e.g., camera, lidar) and explicitly representing uncertainty, the system can build more accurate and reliable maps of the environment. This could be particularly useful for robots or vehicles navigating through unknown or hazardous off-road areas, where understanding the uncertainty in the surroundings is crucial for safe and effective decision-making.
Technical Explanation
The core of the proposed approach is the use of the Dempster-Shafer theory of evidence to model and fuse sensor data for semantic mapping. This theory provides a framework for representing and combining uncertain information from multiple sources.
The system first extracts visual and geometric features from sensor data (e.g., camera, lidar) and uses these to generate initial class probability distributions for different semantic labels (e.g., terrain type, obstacles). These probabilities are then combined using Dempster's rule of combination to fuse the evidence from multiple sensors.
The fused evidence is used to update a semantic grid map of the environment, where each cell represents the belief, plausibility, and uncertainty associated with different semantic classes. This uncertainty-aware map can then be used for tasks like path planning and obstacle avoidance in off-road scenarios.
The authors evaluate their approach on several off-road datasets and show that it outperforms traditional mapping techniques in terms of accuracy and uncertainty quantification.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed uncertainty-aware semantic mapping approach. The use of the Dempster-Shafer theory to model and fuse sensor data is a principled and well-established technique, and the authors demonstrate its advantages over simpler probabilistic methods.
One potential limitation is the reliance on hand-crafted features for the initial semantic labeling. While the authors show that this works well in their experiments, there may be opportunities to further improve performance by incorporating deep learning-based feature extraction or [evidential learning approaches](https://aimodels.fyi/papers/arxiv/deep-evidential-learning-dose-prediction, https://aimodels.fyi/papers/arxiv/epl-evidential-prototype-learning-semi-supervised-medical).
Additionally, the paper does not delve deeply into the interpretability or explainability of the uncertainty estimates produced by the system. In safety-critical applications like autonomous navigation, it may be important to better understand the sources and implications of the uncertainty, which could be an area for future research.
Conclusion
This paper presents a novel approach for uncertainty-aware semantic mapping in off-road environments using the Dempster-Shafer theory of evidence. By explicitly modeling and fusing sensor data uncertainty, the system can build more accurate and reliable maps of complex, unstructured terrains.
The proposed method demonstrates promising results and could have significant implications for a variety of autonomous systems, such as self-driving cars and field robots, that need to navigate challenging off-road environments. Further research into incorporating advanced feature extraction and interpretable uncertainty modeling could help unlock the full potential of this approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Uncertainty-aware Semantic Mapping in Off-road Environments with Dempster-Shafer Theory of Evidence
Junyoung Kim, Junwon Seo
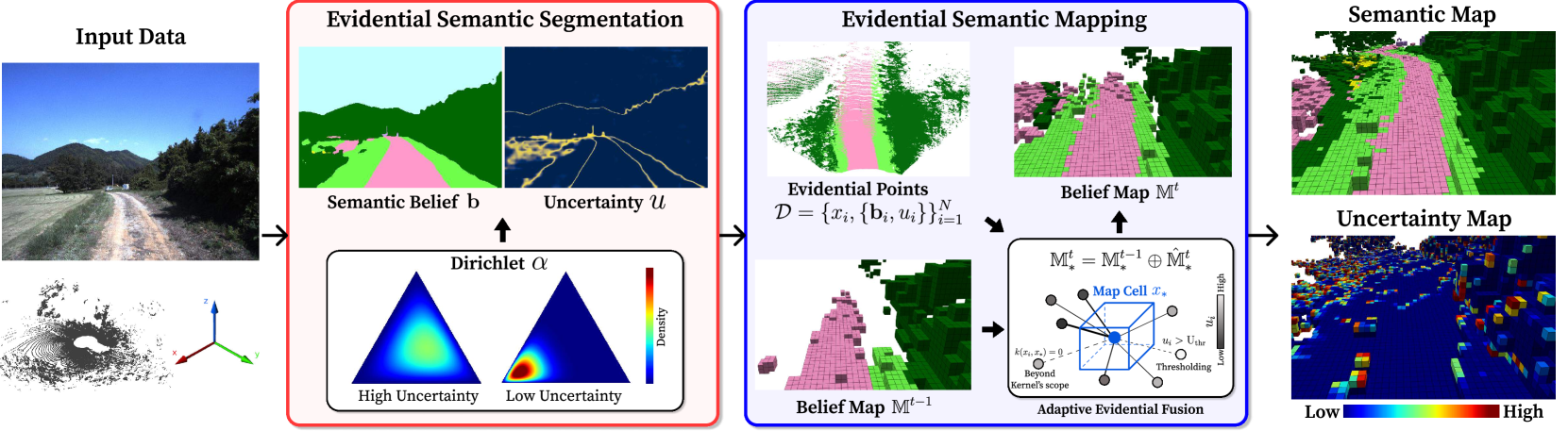
Semantic mapping with Bayesian Kernel Inference (BKI) has shown promise in providing a richer understanding of environments by effectively leveraging local spatial information. However, existing methods face challenges in constructing accurate semantic maps or reliable uncertainty maps in perceptually challenging environments due to unreliable semantic predictions. To address this issue, we propose an evidential semantic mapping framework, which integrates the evidential reasoning of Dempster-Shafer Theory of Evidence (DST) into the entire mapping pipeline by adopting Evidential Deep Learning (EDL) and Dempster's rule of combination. Additionally, the extended belief is devised to incorporate local spatial information based on their uncertainty during the mapping process. Comprehensive experiments across various off-road datasets demonstrate that our framework enhances the reliability of uncertainty maps, consistently outperforming existing methods in scenes with high perceptual uncertainties while showing semantic accuracy comparable to the best-performing semantic mapping techniques.
Read more5/13/2024

0
Uncertainty Quantification for Bird's Eye View Semantic Segmentation: Methods and Benchmarks
Linlin Yu, Bowen Yang, Tianhao Wang, Kangshuo Li, Feng Chen
The fusion of raw features from multiple sensors on an autonomous vehicle to create a Bird's Eye View (BEV) representation is crucial for planning and control systems. There is growing interest in using deep learning models for BEV semantic segmentation. Anticipating segmentation errors and improving the explainability of DNNs is essential for autonomous driving, yet it is under-studied. This paper introduces a benchmark for predictive uncertainty quantification in BEV segmentation. The benchmark assesses various approaches across three popular datasets using two representative backbones and focuses on the effectiveness of predicted uncertainty in identifying misclassified and out-of-distribution (OOD) pixels, as well as calibration. Empirical findings highlight the challenges in uncertainty quantification. Our results find that evidential deep learning based approaches show the most promise by efficiently quantifying aleatoric and epistemic uncertainty. We propose the Uncertainty-Focal-Cross-Entropy (UFCE) loss, designed for highly imbalanced data, which consistently improves the segmentation quality and calibration. Additionally, we introduce a vacuity-scaled regularization term that enhances the model's focus on high uncertainty pixels, improving epistemic uncertainty quantification.
Read more6/3/2024

0
Uncertainty-aware Evidential Fusion-based Learning for Semi-supervised Medical Image Segmentation
Yuanpeng He, Lijian Li
Although the existing uncertainty-based semi-supervised medical segmentation methods have achieved excellent performance, they usually only consider a single uncertainty evaluation, which often fails to solve the problem related to credibility completely. Therefore, based on the framework of evidential deep learning, this paper integrates the evidential predictive results in the cross-region of mixed and original samples to reallocate the confidence degree and uncertainty measure of each voxel, which is realized by emphasizing uncertain information of probability assignments fusion rule of traditional evidence theory. Furthermore, we design a voxel-level asymptotic learning strategy by introducing information entropy to combine with the fused uncertainty measure to estimate voxel prediction more precisely. The model will gradually pay attention to the prediction results with high uncertainty in the learning process, to learn the features that are difficult to master. The experimental results on LA, Pancreas-CT, ACDC and TBAD datasets demonstrate the superior performance of our proposed method in comparison with the existing state of the arts.
Read more4/12/2024

0
Beyond Uncertainty: Evidential Deep Learning for Robust Video Temporal Grounding
Kaijing Ma, Haojian Huang, Jin Chen, Haodong Chen, Pengliang Ji, Xianghao Zang, Han Fang, Chao Ban, Hao Sun, Mulin Chen, Xuelong Li
Existing Video Temporal Grounding (VTG) models excel in accuracy but often overlook open-world challenges posed by open-vocabulary queries and untrimmed videos. This leads to unreliable predictions for noisy, corrupted, and out-of-distribution data. Adapting VTG models to dynamically estimate uncertainties based on user input can address this issue. To this end, we introduce SRAM, a robust network module that benefits from a two-stage cross-modal alignment task. More importantly, it integrates Deep Evidential Regression (DER) to explicitly and thoroughly quantify uncertainty during training, thus allowing the model to say I do not know in scenarios beyond its handling capacity. However, the direct application of traditional DER theory and its regularizer reveals structural flaws, leading to unintended constraints in VTG tasks. In response, we develop a simple yet effective Geom-regularizer that enhances the uncertainty learning framework from the ground up. To the best of our knowledge, this marks the first successful attempt of DER in VTG. Our extensive quantitative and qualitative results affirm the effectiveness, robustness, and interpretability of our modules and the uncertainty learning paradigm in VTG tasks. The code will be made available.
Read more8/30/2024