UniGarmentManip: A Unified Framework for Category-Level Garment Manipulation via Dense Visual Correspondence

0

Sign in to get full access
Overview
- This paper presents a unified framework called UniGarmentManip for category-level garment manipulation via dense visual correspondence.
- The framework allows for transferring garments between different clothing categories and sizes, as well as generating new garment images.
- It leverages dense visual correspondence to establish pixel-level alignment between garment images, enabling consistent and coherent garment manipulation.
Plain English Explanation
UniGarmentManip is a system that allows you to manipulate clothing items in digital images in powerful ways. It can take a shirt, for example, and transfer it onto a different type of clothing, like a dress. It can also resize garments to fit different body shapes and sizes. This is all possible because the system can precisely align the visual elements of clothing, establishing a deep understanding of how different garments relate to each other.
This is useful for applications like virtual clothing try-on or automatically generating new clothing designs. By being able to manipulate garments in this flexible way, the technology opens up new possibilities for interacting with and creating digital clothing.
Technical Explanation
The key innovation of UniGarmentManip is its use of dense visual correspondence to establish detailed pixel-level alignment between different garment images. This allows the system to transfer not just the overall shape and structure of a garment, but also fine details like texture and patterns.
The framework first learns a set of category-level garment templates that capture the essential visual characteristics of different clothing types. It then uses these templates to warp and deform garment images, aligning them with high precision. This alignment enables consistent and coherent manipulation, such as transferring a shirt onto a dress or resizing a garment to fit a different body shape.
UniGarmentManip builds on recent advances in 3D reconstruction of clothing from images and neural network-based approaches to modeling loose-fitting clothing. By unifying these techniques into a single framework, the authors demonstrate the potential for more versatile and controllable garment manipulation.
Critical Analysis
The authors acknowledge several limitations of their approach. For example, the framework currently focuses on a limited set of garment categories and does not handle highly complex or deformable clothing. Additionally, the quality of the generated garment images may be affected by artifacts or distortions introduced during the warping and manipulation process.
Further research could explore ways to expand the system's capabilities to handle a broader range of clothing types and deformations. Incorporating more advanced generative models or reinforcement learning techniques might also help to improve the realism and coherence of the manipulated garment images.
Overall, UniGarmentManip represents a significant advancement in category-level garment manipulation, with the potential to enable new applications in the fields of virtual fashion and digital clothing design. However, as with any emerging technology, there are still opportunities for continued refinement and development.
Conclusion
The UniGarmentManip framework introduces a novel approach to garment manipulation that leverages dense visual correspondence to enable flexible and coherent transfer of clothing between different categories and sizes. By establishing detailed pixel-level alignment, the system can preserve the unique visual characteristics of garments while allowing for powerful manipulations.
This technology has exciting implications for a variety of applications, from virtual clothing try-on to automated garment design. As the field of digital fashion continues to evolve, frameworks like UniGarmentManip will likely play an increasingly important role in shaping the way we interact with and create digital clothing.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UniGarmentManip: A Unified Framework for Category-Level Garment Manipulation via Dense Visual Correspondence
Ruihai Wu, Haoran Lu, Yiyan Wang, Yubo Wang, Hao Dong
Garment manipulation (e.g., unfolding, folding and hanging clothes) is essential for future robots to accomplish home-assistant tasks, while highly challenging due to the diversity of garment configurations, geometries and deformations. Although able to manipulate similar shaped garments in a certain task, previous works mostly have to design different policies for different tasks, could not generalize to garments with diverse geometries, and often rely heavily on human-annotated data. In this paper, we leverage the property that, garments in a certain category have similar structures, and then learn the topological dense (point-level) visual correspondence among garments in the category level with different deformations in the self-supervised manner. The topological correspondence can be easily adapted to the functional correspondence to guide the manipulation policies for various downstream tasks, within only one or few-shot demonstrations. Experiments over garments in 3 different categories on 3 representative tasks in diverse scenarios, using one or two arms, taking one or more steps, inputting flat or messy garments, demonstrate the effectiveness of our proposed method. Project page: https://warshallrho.github.io/unigarmentmanip.
Read more5/14/2024

0
General-purpose Clothes Manipulation with Semantic Keypoints
Yuhong Deng, David Hsu
We have seen much recent progress in task-specific clothes manipulation, but generalizable clothes manipulation is still a challenge. Clothes manipulation requires sequential actions, making it challenging to generalize to unseen tasks. Besides, a general clothes state representation method is crucial. In this paper, we adopt language instructions to specify and decompose clothes manipulation tasks, and propose a large language model based hierarchical learning method to enhance generalization. For state representation, we use semantic keypoints to capture the geometry of clothes and outline their manipulation methods. Simulation experiments show that the proposed method outperforms the baseline method in terms of success rate and generalization for clothes manipulation tasks.
Read more8/16/2024
0
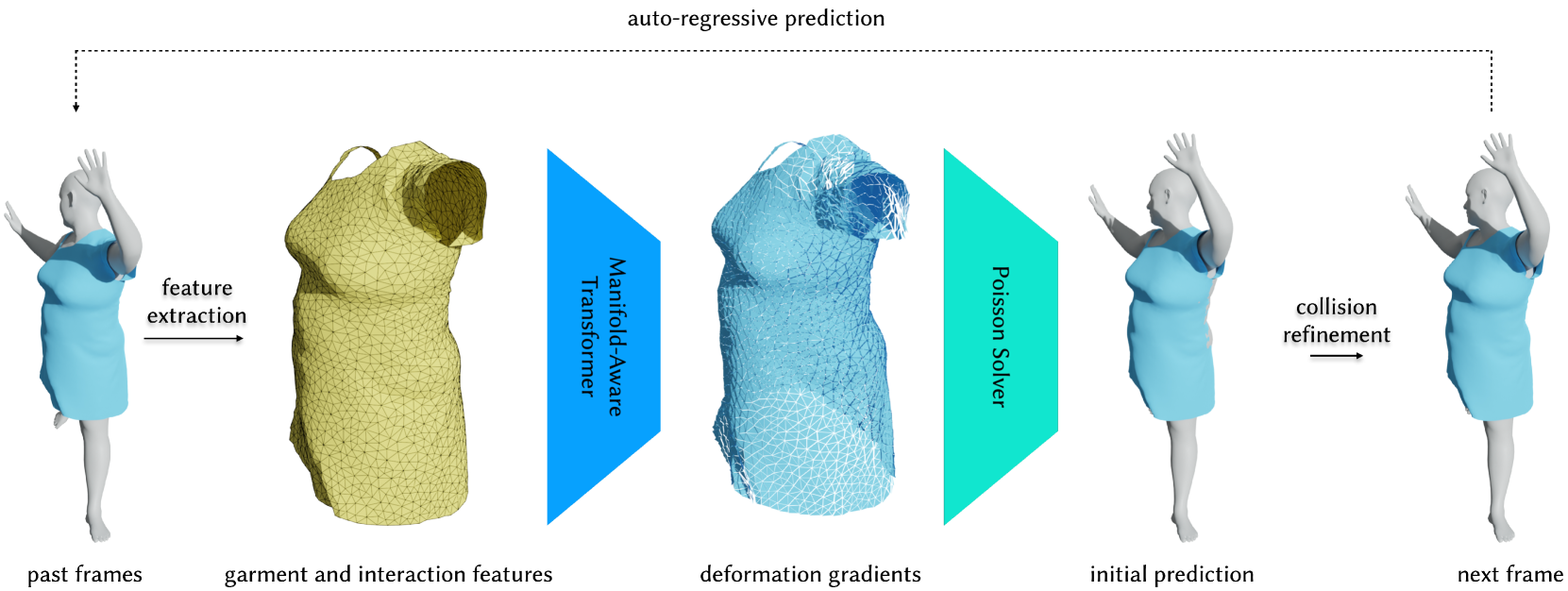
Neural Garment Dynamics via Manifold-Aware Transformers
Peizhuo Li, Tuanfeng Y. Wang, Timur Levent Kesdogan, Duygu Ceylan, Olga Sorkine-Hornung
Data driven and learning based solutions for modeling dynamic garments have significantly advanced, especially in the context of digital humans. However, existing approaches often focus on modeling garments with respect to a fixed parametric human body model and are limited to garment geometries that were seen during training. In this work, we take a different approach and model the dynamics of a garment by exploiting its local interactions with the underlying human body. Specifically, as the body moves, we detect local garment-body collisions, which drive the deformation of the garment. At the core of our approach is a mesh-agnostic garment representation and a manifold-aware transformer network design, which together enable our method to generalize to unseen garment and body geometries. We evaluate our approach on a wide variety of garment types and motion sequences and provide competitive qualitative and quantitative results with respect to the state of the art.
Read more7/9/2024

0
Reconstruction of Manipulated Garment with Guided Deformation Prior
Ren Li, Corentin Dumery, Zhantao Deng, Pascal Fua
Modeling the shape of garments has received much attention, but most existing approaches assume the garments to be worn by someone, which constrains the range of shapes they can assume. In this work, we address shape recovery when garments are being manipulated instead of worn, which gives rise to an even larger range of possible shapes. To this end, we leverage the implicit sewing patterns (ISP) model for garment modeling and extend it by adding a diffusion-based deformation prior to represent these shapes. To recover 3D garment shapes from incomplete 3D point clouds acquired when the garment is folded, we map the points to UV space, in which our priors are learned, to produce partial UV maps, and then fit the priors to recover complete UV maps and 2D to 3D mappings. Experimental results demonstrate the superior reconstruction accuracy of our method compared to previous ones, especially when dealing with large non-rigid deformations arising from the manipulations.
Read more5/20/2024