VIPriors 4: Visual Inductive Priors for Data-Efficient Deep Learning Challenges

0

Sign in to get full access
Overview
- The paper introduces the VIPriors 4 challenge, which focuses on exploring visual inductive priors for data-efficient deep learning in the contexts of object detection and instance segmentation.
- The challenge aims to push the boundaries of deep learning by developing models that can learn effectively from limited training data, leveraging inductive biases and priors derived from visual perception.
- Participants are tasked with designing novel deep learning architectures, training strategies, and learning algorithms that can outperform standard approaches on object detection and instance segmentation benchmarks with fewer training samples.
Plain English Explanation
The VIPriors 4 challenge is a research competition that focuses on developing [learning-3d-robotics-perception-using-inductive-priors] for deep learning models in computer vision tasks like [vip-llava-making-large-multimodal-models-understand] and instance segmentation. The goal is to create models that can learn effectively from [conditional-prototype-rectification-prompt-learning] amounts of training data by incorporating inductive biases and priors derived from how humans visually perceive the world.
Participants in the challenge are tasked with designing novel deep learning architectures, training strategies, and learning algorithms that can outperform standard approaches on common computer vision benchmarks, but with significantly [customize-your-own-paired-data-via-few] training data. The hope is that by leveraging [epistemic-uncertainty-weighted-loss-visual-bias-mitigation] priors, the models will be able to learn more efficiently and generalize better, even when faced with limited training examples.
Technical Explanation
The VIPriors 4 challenge builds on previous work in the VIPriors series, which has explored how to incorporate [learning-3d-robotics-perception-using-inductive-priors] into deep learning models to improve their data efficiency and generalization. In this iteration, the focus is on two key computer vision tasks: object detection and instance segmentation.
Object detection involves identifying the location and class of objects in an image, while instance segmentation goes a step further by also delineating the precise boundaries of each object instance. These are fundamental building blocks for many real-world computer vision applications, from autonomous driving to medical image analysis.
The challenge organizers provide participants with [vip-llava-making-large-multimodal-models-understand] datasets for training and evaluating their models. The key constraint is that the training data is limited, forcing participants to develop techniques that can [conditional-prototype-rectification-prompt-learning] from fewer examples. This could involve novel network architectures, specialized training regimes, or the incorporation of [customize-your-own-paired-data-via-few] priors derived from human visual perception.
Critical Analysis
The VIPriors 4 challenge represents an important step towards building more [epistemic-uncertainty-weighted-loss-visual-bias-mitigation] and data-efficient deep learning models for computer vision. By focusing on leveraging visual inductive priors, the organizers hope to spur innovation in areas like [learning-3d-robotics-perception-using-inductive-priors] and instance segmentation that can generalize well even with limited training data.
However, one potential limitation of the challenge is the reliance on [vip-llava-making-large-multimodal-models-understand] datasets, which may not fully capture the complexity and diversity of real-world visual scenes. Additionally, the specific priors and inductive biases that are most effective for boosting data efficiency are still an open research question, and the challenge may not provide a comprehensive answer.
Furthermore, while the focus on data efficiency is commendable, there may be concerns about [conditional-prototype-rectification-prompt-learning] models that are overly specialized to the training data and fail to generalize to novel [customize-your-own-paired-data-via-few] or out-of-distribution scenarios. Careful evaluation of the developed models' robustness and generalization capabilities will be crucial.
Conclusion
The VIPriors 4 challenge represents a significant step forward in the quest to develop more [epistemic-uncertainty-weighted-loss-visual-bias-mitigation] and data-efficient deep learning models for computer vision tasks. By encouraging researchers to explore the incorporation of visual inductive priors, the challenge has the potential to yield novel architectures, training strategies, and learning algorithms that can push the boundaries of what is possible with [learning-3d-robotics-perception-using-inductive-priors] data.
The insights and innovations generated through the VIPriors 4 challenge could have far-reaching implications for a wide range of real-world applications, from autonomous systems to medical image analysis. As the field of computer vision continues to evolve, the successful development of [vip-llava-making-large-multimodal-models-understand] models will be crucial for unlocking the full potential of deep learning in the years to come.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
VIPriors 4: Visual Inductive Priors for Data-Efficient Deep Learning Challenges
Robert-Jan Bruintjes, Attila Lengyel, Marcos Baptista Rios, Osman Semih Kayhan, Davide Zambrano, Nergis Tomen, Jan van Gemert
The fourth edition of the VIPriors: Visual Inductive Priors for Data-Efficient Deep Learning workshop features two data-impaired challenges. These challenges address the problem of training deep learning models for computer vision tasks with limited data. Participants are limited to training models from scratch using a low number of training samples and are not allowed to use any form of transfer learning. We aim to stimulate the development of novel approaches that incorporate inductive biases to improve the data efficiency of deep learning models. Significant advancements are made compared to the provided baselines, where winning solutions surpass the baselines by a considerable margin in both tasks. As in previous editions, these achievements are primarily attributed to heavy use of data augmentation policies and large model ensembles, though novel prior-based methods seem to contribute more to successful solutions compared to last year. This report highlights the key aspects of the challenges and their outcomes.
Read more7/2/2024
0
Learning 3D Robotics Perception using Inductive Priors
Muhammad Zubair Irshad
Recent advances in deep learning have led to a data-centric intelligence i.e. artificially intelligent models unlocking the potential to ingest a large amount of data and be really good at performing digital tasks such as text-to-image generation, machine-human conversation, and image recognition. This thesis covers the topic of learning with structured inductive bias and priors to design approaches and algorithms unlocking the potential of principle-centric intelligence. Prior knowledge (priors for short), often available in terms of past experience as well as assumptions of how the world works, helps the autonomous agent generalize better and adapt their behavior based on past experience. In this thesis, I demonstrate the use of prior knowledge in three different robotics perception problems. 1. object-centric 3D reconstruction, 2. vision and language for decision-making, and 3. 3D scene understanding. To solve these challenging problems, I propose various sources of prior knowledge including 1. geometry and appearance priors from synthetic data, 2. modularity and semantic map priors and 3. semantic, structural, and contextual priors. I study these priors for solving robotics 3D perception tasks and propose ways to efficiently encode them in deep learning models. Some priors are used to warm-start the network for transfer learning, others are used as hard constraints to restrict the action space of robotics agents. While classical techniques are brittle and fail to generalize to unseen scenarios and data-centric approaches require a large amount of labeled data, this thesis aims to build intelligent agents which require very-less real-world data or data acquired only from simulation to generalize to highly dynamic and cluttered environments in novel simulations (i.e. sim2sim) or real-world unseen environments (i.e. sim2real) for a holistic scene understanding of the 3D world.
Read more6/3/2024
0
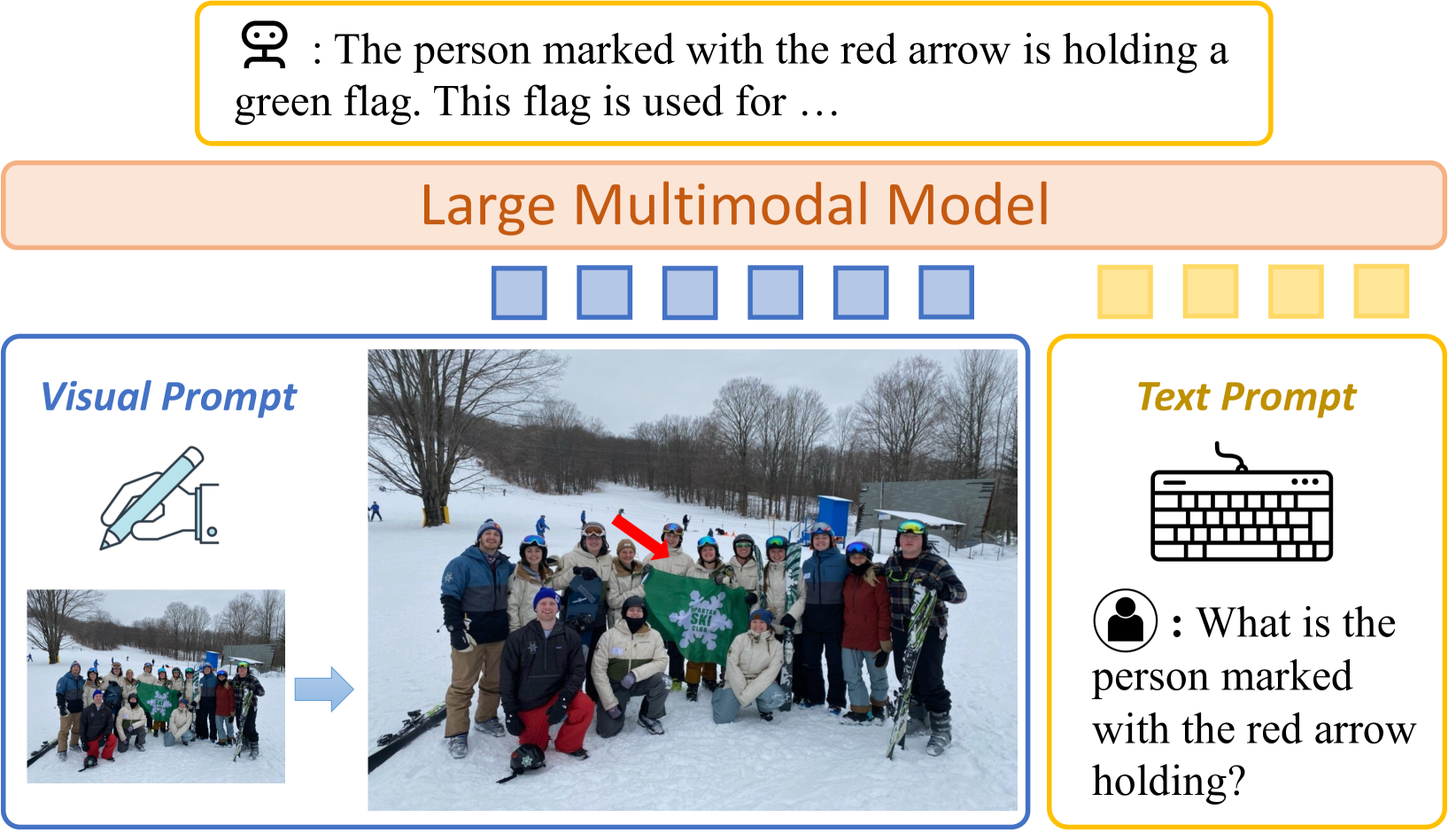
ViP-LLaVA: Making Large Multimodal Models Understand Arbitrary Visual Prompts
Mu Cai, Haotian Liu, Dennis Park, Siva Karthik Mustikovela, Gregory P. Meyer, Yuning Chai, Yong Jae Lee
While existing large vision-language multimodal models focus on whole image understanding, there is a prominent gap in achieving region-specific comprehension. Current approaches that use textual coordinates or spatial encodings often fail to provide a user-friendly interface for visual prompting. To address this challenge, we introduce a novel multimodal model capable of decoding arbitrary visual prompts. This allows users to intuitively mark images and interact with the model using natural cues like a red bounding box or pointed arrow. Our simple design directly overlays visual markers onto the RGB image, eliminating the need for complex region encodings, yet achieves state-of-the-art performance on region-understanding tasks like Visual7W, PointQA, and Visual Commonsense Reasoning benchmark. Furthermore, we present ViP-Bench, a comprehensive benchmark to assess the capability of models in understanding visual prompts across multiple dimensions, enabling future research in this domain. Code, data, and model are publicly available.
Read more4/30/2024

0
Conditional Prototype Rectification Prompt Learning
Haoxing Chen, Yaohui Li, Zizheng Huang, Yan Hong, Zhuoer Xu, Zhangxuan Gu, Jun Lan, Huijia Zhu, Weiqiang Wang
Pre-trained large-scale vision-language models (VLMs) have acquired profound understanding of general visual concepts. Recent advancements in efficient transfer learning (ETL) have shown remarkable success in fine-tuning VLMs within the scenario of limited data, introducing only a few parameters to harness task-specific insights from VLMs. Despite significant progress, current leading ETL methods tend to overfit the narrow distributions of base classes seen during training and encounter two primary challenges: (i) only utilizing uni-modal information to modeling task-specific knowledge; and (ii) using costly and time-consuming methods to supplement knowledge. To address these issues, we propose a Conditional Prototype Rectification Prompt Learning (CPR) method to correct the bias of base examples and augment limited data in an effective way. Specifically, we alleviate overfitting on base classes from two aspects. First, each input image acquires knowledge from both textual and visual prototypes, and then generates sample-conditional text tokens. Second, we extract utilizable knowledge from unlabeled data to further refine the prototypes. These two strategies mitigate biases stemming from base classes, yielding a more effective classifier. Extensive experiments on 11 benchmark datasets show that our CPR achieves state-of-the-art performance on both few-shot classification and base-to-new generalization tasks. Our code is avaliable at url{https://github.com/chenhaoxing/CPR}.
Read more8/21/2024