Visual SLAM with 3D Gaussian Primitives and Depth Priors Enabling Novel View Synthesis

0

Sign in to get full access
Overview
- Visual SLAM (Simultaneous Localization and Mapping) is a technique used to reconstruct a 3D scene from camera images and estimate the camera's position within that scene.
- This research paper proposes a novel visual SLAM approach that uses 3D Gaussian primitives and depth priors to enable high-quality 3D reconstruction and novel view synthesis.
- Key innovations include the use of 3D Gaussian splatting for dense and smooth 3D representations, and the incorporation of depth priors to improve reconstruction quality.
Plain English Explanation
The paper describes a new way to do visual SLAM, which is the process of building a 3D map of an environment while also tracking the position of the camera within that environment. The key idea is to represent the 3D scene using 3D Gaussian "blobs" instead of discrete 3D points. This Gaussian splatting approach allows for a denser and smoother 3D reconstruction compared to traditional point-based methods.
Additionally, the system uses "depth priors" - information about the likely depth of objects in the scene - to further improve the quality of the 3D reconstruction. This depth prior information could come from various sources, such as semantic segmentation or learned depth prediction models.
By combining 3D Gaussian primitives and depth priors, the system is able to produce high-quality 3D reconstructions that can then be used to synthesize novel views of the scene - that is, generate new camera perspectives that were not part of the original input. This novel view synthesis capability is an important feature that expands the potential applications of the visual SLAM system.
Technical Explanation
The proposed visual SLAM system represents the 3D scene using a set of 3D Gaussian primitives, where each Gaussian corresponds to a local region in the environment. This Gaussian splatting approach allows for a dense and smooth 3D reconstruction, in contrast to traditional point-based SLAM methods.
To further improve the quality of the 3D reconstruction, the system incorporates depth priors - additional information about the likely depth of objects in the scene. These depth priors can come from various sources, such as semantic segmentation or learned depth prediction models. By combining the 3D Gaussian primitives with the depth priors, the system is able to produce high-quality 3D reconstructions.
The 3D reconstructions generated by the system can then be used to synthesize novel views of the scene - that is, generate new camera perspectives that were not part of the original input. This novel view synthesis capability is an important feature that expands the potential applications of the visual SLAM system, such as in augmented reality or free-viewpoint video.
Critical Analysis
The paper presents a promising approach for visual SLAM that combines 3D Gaussian primitives and depth priors to enable high-quality 3D reconstruction and novel view synthesis. However, the authors do not provide a detailed analysis of the limitations or potential issues with their approach.
For example, the reliance on depth priors could be a potential weakness, as the quality of the reconstruction will be heavily dependent on the accuracy and reliability of the depth information from external sources. Additionally, the computational complexity of the Gaussian splatting approach may limit its real-time performance, which is a crucial requirement for many visual SLAM applications.
Further research and experimentation would be needed to fully understand the trade-offs and practical limitations of this approach, as well as to compare it to other state-of-the-art visual SLAM techniques. Nonetheless, the core ideas presented in the paper represent an interesting and potentially impactful contribution to the field of 3D reconstruction and visual SLAM.
Conclusion
This research paper proposes a novel visual SLAM approach that uses 3D Gaussian primitives and depth priors to enable high-quality 3D reconstruction and novel view synthesis. The key innovations include the use of Gaussian splatting for dense and smooth 3D representations, and the incorporation of depth priors to improve reconstruction quality.
By combining these techniques, the system is able to produce 3D reconstructions that can be used to synthesize novel views of the scene - an important capability that expands the potential applications of visual SLAM. While the paper does not provide a detailed analysis of the limitations or potential issues, the core ideas represent an interesting and potentially impactful contribution to the field of 3D reconstruction and visual SLAM.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Visual SLAM with 3D Gaussian Primitives and Depth Priors Enabling Novel View Synthesis
Zhongche Qu, Zhi Zhang, Cong Liu, Jianhua Yin
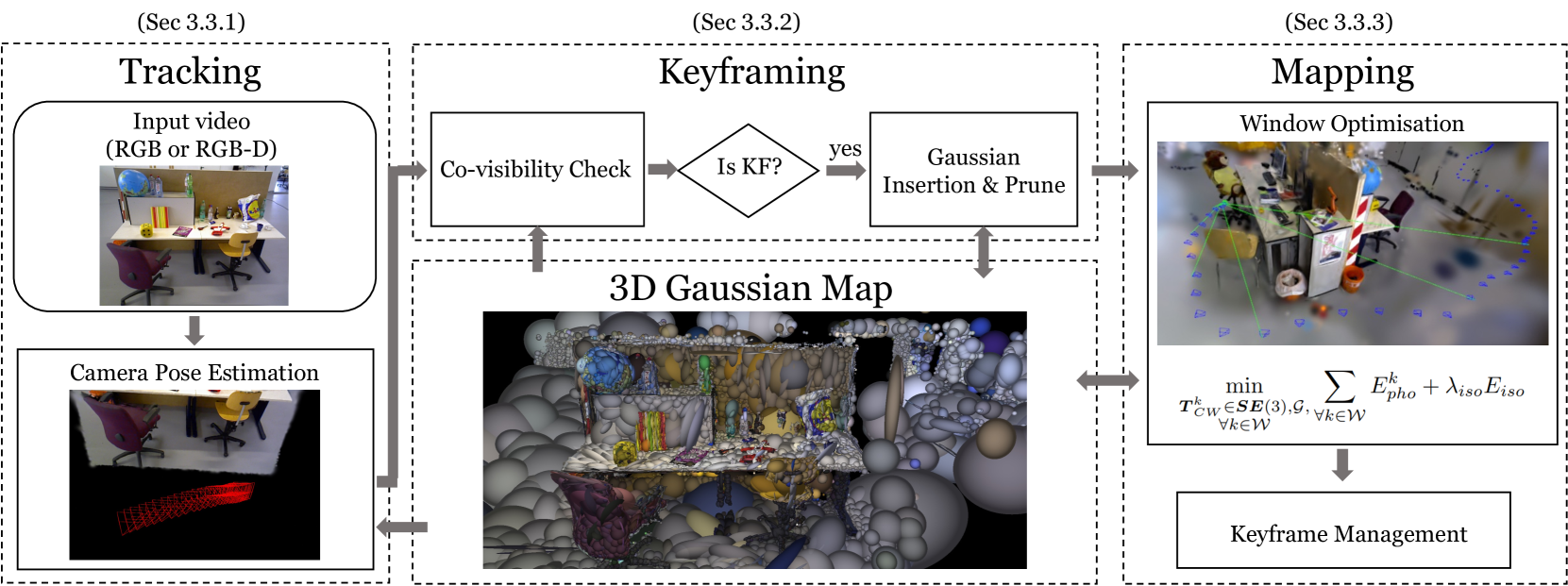
Conventional geometry-based SLAM systems lack dense 3D reconstruction capabilities since their data association usually relies on feature correspondences. Additionally, learning-based SLAM systems often fall short in terms of real-time performance and accuracy. Balancing real-time performance with dense 3D reconstruction capabilities is a challenging problem. In this paper, we propose a real-time RGB-D SLAM system that incorporates a novel view synthesis technique, 3D Gaussian Splatting, for 3D scene representation and pose estimation. This technique leverages the real-time rendering performance of 3D Gaussian Splatting with rasterization and allows for differentiable optimization in real time through CUDA implementation. We also enable mesh reconstruction from 3D Gaussians for explicit dense 3D reconstruction. To estimate accurate camera poses, we utilize a rotation-translation decoupled strategy with inverse optimization. This involves iteratively updating both in several iterations through gradient-based optimization. This process includes differentiably rendering RGB, depth, and silhouette maps and updating the camera parameters to minimize a combined loss of photometric loss, depth geometry loss, and visibility loss, given the existing 3D Gaussian map. However, 3D Gaussian Splatting (3DGS) struggles to accurately represent surfaces due to the multi-view inconsistency of 3D Gaussians, which can lead to reduced accuracy in both camera pose estimation and scene reconstruction. To address this, we utilize depth priors as additional regularization to enforce geometric constraints, thereby improving the accuracy of both pose estimation and 3D reconstruction. We also provide extensive experimental results on public benchmark datasets to demonstrate the effectiveness of our proposed methods in terms of pose accuracy, geometric accuracy, and rendering performance.
Read more8/22/2024
🗣️
0
GS-SLAM: Dense Visual SLAM with 3D Gaussian Splatting
Chi Yan, Delin Qu, Dan Xu, Bin Zhao, Zhigang Wang, Dong Wang, Xuelong Li
In this paper, we introduce textbf{GS-SLAM} that first utilizes 3D Gaussian representation in the Simultaneous Localization and Mapping (SLAM) system. It facilitates a better balance between efficiency and accuracy. Compared to recent SLAM methods employing neural implicit representations, our method utilizes a real-time differentiable splatting rendering pipeline that offers significant speedup to map optimization and RGB-D rendering. Specifically, we propose an adaptive expansion strategy that adds new or deletes noisy 3D Gaussians in order to efficiently reconstruct new observed scene geometry and improve the mapping of previously observed areas. This strategy is essential to extend 3D Gaussian representation to reconstruct the whole scene rather than synthesize a static object in existing methods. Moreover, in the pose tracking process, an effective coarse-to-fine technique is designed to select reliable 3D Gaussian representations to optimize camera pose, resulting in runtime reduction and robust estimation. Our method achieves competitive performance compared with existing state-of-the-art real-time methods on the Replica, TUM-RGBD datasets. Project page: https://gs-slam.github.io/.
Read more4/9/2024
0
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
Read more4/16/2024
🛸
0
IG-SLAM: Instant Gaussian SLAM
F. Aykut Sarikamis, A. Aydin Alatan
3D Gaussian Splatting has recently shown promising results as an alternative scene representation in SLAM systems to neural implicit representations. However, current methods either lack dense depth maps to supervise the mapping process or detailed training designs that consider the scale of the environment. To address these drawbacks, we present IG-SLAM, a dense RGB-only SLAM system that employs robust Dense-SLAM methods for tracking and combines them with Gaussian Splatting. A 3D map of the environment is constructed using accurate pose and dense depth provided by tracking. Additionally, we utilize depth uncertainty in map optimization to improve 3D reconstruction. Our decay strategy in map optimization enhances convergence and allows the system to run at 10 fps in a single process. We demonstrate competitive performance with state-of-the-art RGB-only SLAM systems while achieving faster operation speeds. We present our experiments on the Replica, TUM-RGBD, ScanNet, and EuRoC datasets. The system achieves photo-realistic 3D reconstruction in large-scale sequences, particularly in the EuRoC dataset.
Read more8/9/2024