Whole-body end-effector pose tracking

0

Sign in to get full access
Overview
- Presents a method for whole-body end-effector pose tracking, which is crucial for robotic manipulation and control.
- Introduces a neural network-based approach that can estimate the 6D end-effector pose from partial observations of the robot's body.
- Demonstrates the effectiveness of the proposed method on real-world data from a PR2 robot.
Plain English Explanation
The paper discusses a technique for tracking the position and orientation (known as the "pose") of a robot's end-effector, which is the part of the robot that interacts with the environment, such as a gripper or tool. [1] Accurately tracking the end-effector pose is essential for robotic manipulation and control, as it allows the robot to precisely interact with objects and its surroundings.
The researchers developed a neural network-based approach that can estimate the 6D (3D position and 3D orientation) end-effector pose from partial observations of the robot's body. [2] This means the system doesn't need to have full information about the robot's body to determine the end-effector's pose, which can be useful in situations where the robot's full state is not available or difficult to measure.
The team tested their method on real-world data collected from a PR2 robot, a popular research platform, and found that it was effective at accurately tracking the end-effector pose. [3] This suggests the technique could be a valuable tool for robotic manipulation and control applications, where precise end-effector tracking is crucial for tasks like grasping objects or interacting with the environment.
Technical Explanation
The paper presents a [4] novel neural network-based approach for estimating the 6D end-effector pose of a robot from partial observations of its body. The key idea is to train a deep neural network to map from the robot's partial state (e.g., joint angles, camera images) to the desired end-effector pose, without requiring full knowledge of the robot's kinematics or configuration.
The proposed [5] architecture consists of an encoder network that processes the partial robot observations and a pose prediction network that outputs the estimated 6D end-effector pose. The authors train the system end-to-end using a combination of supervised and unsupervised losses, leveraging both ground truth pose data and self-consistency constraints.
The researchers evaluate their method on a real-world dataset collected from a PR2 robot, which includes partial observations of the robot's state and ground truth end-effector poses obtained from an external motion capture system. [6] The results demonstrate that the proposed approach can accurately estimate the end-effector pose, outperforming baseline methods that rely on traditional forward kinematics or learning-based techniques.
Critical Analysis
The paper presents a promising approach for whole-body end-effector pose tracking, which is an important capability for robotic manipulation and control. [7] The authors' use of a neural network-based technique that can handle partial observations is a clever solution to a common challenge in real-world robotic systems, where full state information may not be available.
However, the paper does not discuss the potential limitations of the proposed method, such as its sensitivity to noise in the input data, the size and diversity of the training dataset, or the computational requirements for real-time inference. [8] Additionally, the authors did not explore the generalization of the method to different robot platforms or more complex manipulation tasks.
Future work could investigate ways to further improve the robustness and generalization of the end-effector pose tracking system, such as by incorporating additional sensor modalities, exploring different network architectures, or leveraging unsupervised or self-supervised learning techniques. [9] Evaluating the method's performance in more challenging real-world scenarios would also be valuable for understanding its practical applicability.
Conclusion
This paper presents a novel neural network-based approach for whole-body end-effector pose tracking, a crucial capability for robotic manipulation and control. [10] The proposed method can accurately estimate the 6D end-effector pose from partial observations of the robot's state, as demonstrated on a real-world dataset collected from a PR2 robot.
The technique could have significant implications for improving the precision and autonomy of robotic systems, enabling them to interact with their environments in more sophisticated ways. [11] Further research to address potential limitations and expand the method's capabilities could lead to even more robust and versatile end-effector tracking solutions for a wide range of robotic applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Whole-body end-effector pose tracking
Tifanny Portela, Andrei Cramariuc, Mayank Mittal, Marco Hutter
Combining manipulation with the mobility of legged robots is essential for a wide range of robotic applications. However, integrating an arm with a mobile base significantly increases the system's complexity, making precise end-effector control challenging. Existing model-based approaches are often constrained by their modeling assumptions, leading to limited robustness. Meanwhile, recent Reinforcement Learning (RL) implementations restrict the arm's workspace to be in front of the robot or track only the position to obtain decent tracking accuracy. In this work, we address these limitations by introducing a whole-body RL formulation for end-effector pose tracking in a large workspace on rough, unstructured terrains. Our proposed method involves a terrain-aware sampling strategy for the robot's initial configuration and end-effector pose commands, as well as a game-based curriculum to extend the robot's operating range. We validate our approach on the ANYmal quadrupedal robot with a six DoF robotic arm. Through our experiments, we show that the learned controller achieves precise command tracking over a large workspace and adapts across varying terrains such as stairs and slopes. On deployment, it achieves a pose-tracking error of 2.64 cm and 3.64 degrees, outperforming existing competitive baselines.
Read more9/25/2024
0
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
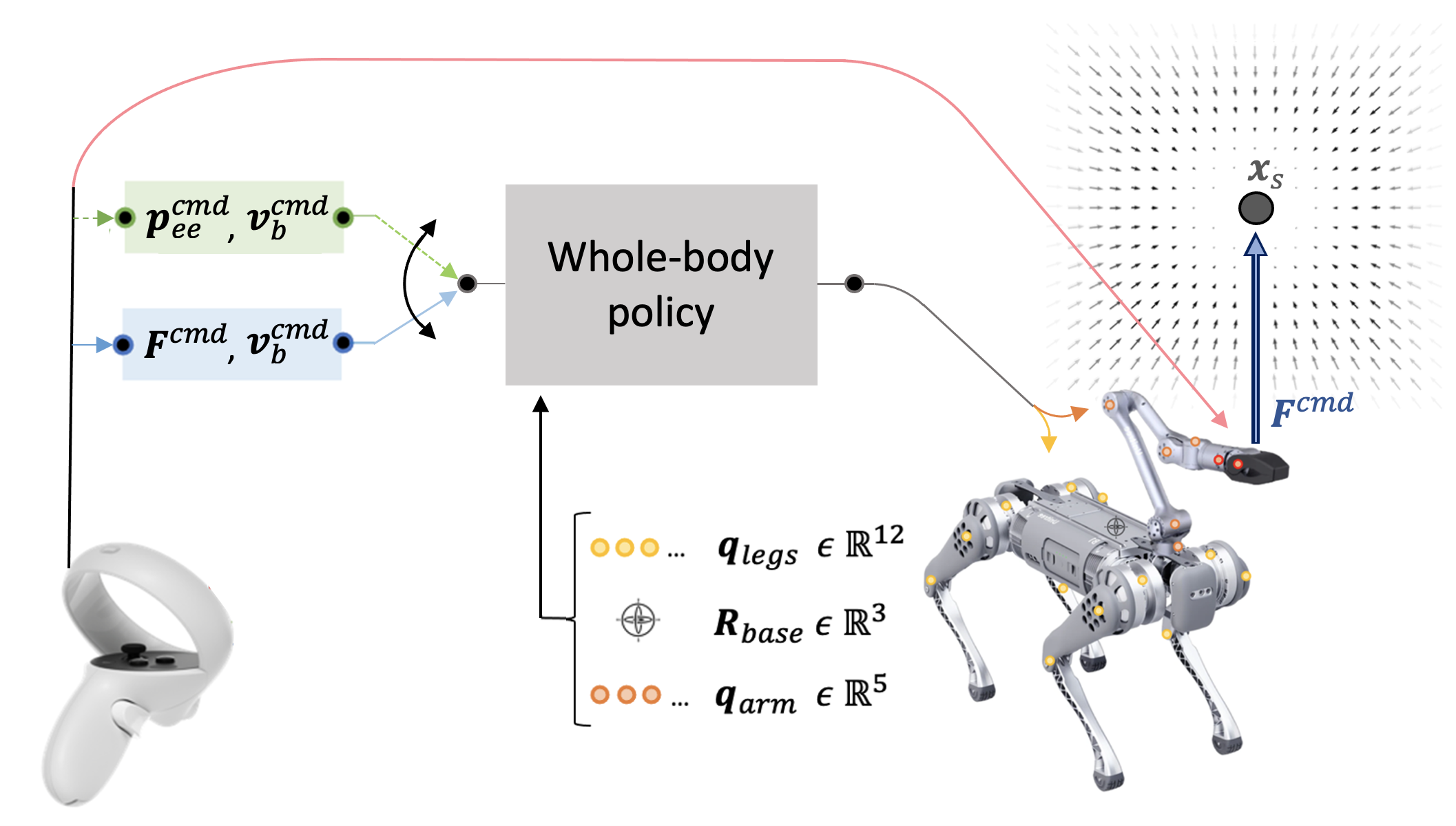
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
Read more5/21/2024

0
Zero-Cost Whole-Body Teleoperation for Mobile Manipulation
Daniel Honerkamp, Harsh Mahesheka, Jan Ole von Hartz, Tim Welschehold, Abhinav Valada
Demonstration data plays a key role in learning complex behaviors and training robotic foundation models. While effective control interfaces exist for static manipulators, data collection remains cumbersome and time intensive for mobile manipulators due to their large number of degrees of freedom. While specialized hardware, avatars, or motion tracking can enable whole-body control, these approaches are either expensive, robot-specific, or suffer from the embodiment mismatch between robot and human demonstrator. In this work, we present MoMa-Teleop, a novel teleoperation method that delegates the base motions to a reinforcement learning agent, leaving the operator to focus fully on the task-relevant end-effector motions. This enables whole-body teleoperation of mobile manipulators with zero additional hardware or setup costs via standard interfaces such as joysticks or hand guidance. Moreover, the operator is not bound to a tracked workspace and can move freely with the robot over spatially extended tasks. We demonstrate that our approach results in a significant reduction in task completion time across a variety of robots and tasks. As the generated data covers diverse whole-body motions without embodiment mismatch, it enables efficient imitation learning. By focusing on task-specific end-effector motions, our approach learns skills that transfer to unseen settings, such as new obstacles or changed object positions, from as little as five demonstrations. We make code and videos available at http://moma-teleop.cs.uni-freiburg.de.
Read more9/24/2024
🏅
0
Agile and versatile bipedal robot tracking control through reinforcement learning
Jiayi Li, Linqi Ye, Yi Cheng, Houde Liu, Bin Liang
The remarkable athletic intelligence displayed by humans in complex dynamic movements such as dancing and gymnastics suggests that the balance mechanism in biological beings is decoupled from specific movement patterns. This decoupling allows for the execution of both learned and unlearned movements under certain constraints while maintaining balance through minor whole-body coordination. To replicate this balance ability and body agility, this paper proposes a versatile controller for bipedal robots. This controller achieves ankle and body trajectory tracking across a wide range of gaits using a single small-scale neural network, which is based on a model-based IK solver and reinforcement learning. We consider a single step as the smallest control unit and design a universally applicable control input form suitable for any single-step variation. Highly flexible gait control can be achieved by combining these minimal control units with high-level policy through our extensible control interface. To enhance the trajectory-tracking capability of our controller, we utilize a three-stage training curriculum. After training, the robot can move freely between target footholds at varying distances and heights. The robot can also maintain static balance without repeated stepping to adjust posture. Finally, we evaluate the tracking accuracy of our controller on various bipedal tasks, and the effectiveness of our control framework is verified in the simulation environment.
Read more4/15/2024