WoCoCo: Learning Whole-Body Humanoid Control with Sequential Contacts

0

Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
WoCoCo: Learning Whole-Body Humanoid Control with Sequential Contacts
Chong Zhang, Wenli Xiao, Tairan He, Guanya Shi
Humanoid activities involving sequential contacts are crucial for complex robotic interactions and operations in the real world and are traditionally solved by model-based motion planning, which is time-consuming and often relies on simplified dynamics models. Although model-free reinforcement learning (RL) has become a powerful tool for versatile and robust whole-body humanoid control, it still requires tedious task-specific tuning and state machine design and suffers from long-horizon exploration issues in tasks involving contact sequences. In this work, we propose WoCoCo (Whole-Body Control with Sequential Contacts), a unified framework to learn whole-body humanoid control with sequential contacts by naturally decomposing the tasks into separate contact stages. Such decomposition facilitates simple and general policy learning pipelines through task-agnostic reward and sim-to-real designs, requiring only one or two task-related terms to be specified for each task. We demonstrated that end-to-end RL-based controllers trained with WoCoCo enable four challenging whole-body humanoid tasks involving diverse contact sequences in the real world without any motion priors: 1) versatile parkour jumping, 2) box loco-manipulation, 3) dynamic clap-and-tap dancing, and 4) cliffside climbing. We further show that WoCoCo is a general framework beyond humanoid by applying it in 22-DoF dinosaur robot loco-manipulation tasks.
Read more6/11/2024
0
Multi-Contact Whole-Body Force Control for Position-Controlled Robots
Quentin Rouxel (LARSEN), Serena Ivaldi (LARSEN), Jean-Baptiste Mouret (LARSEN)
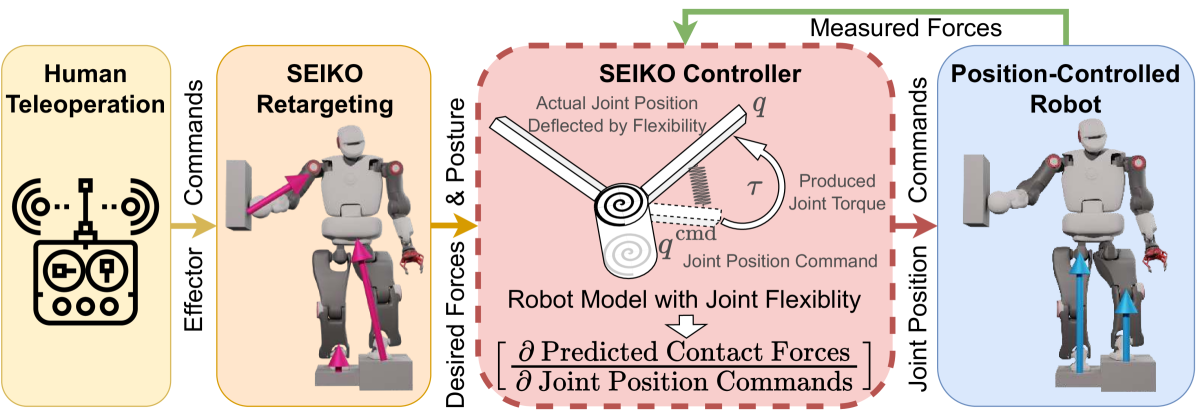
Many humanoid and multi-legged robots are controlled in positions rather than in torques, which prevents direct control of contact forces, and hampers their ability to create multiple contacts to enhance their balance, such as placing a hand on a wall or a handrail. This letter introduces the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) pipeline, and proposes a unified formulation that exploits an explicit model of flexibility to indirectly control contact forces on traditional position-controlled robots. SEIKO formulates whole-body retargeting from Cartesian commands and admittance control using two quadratic programs solved in real-time. Our pipeline is validated with experiments on the real, full-scale humanoid robot Talos in various multi-contact scenarios, including pushing tasks, far-reaching tasks, stair climbing, and stepping on sloped surfaces. Code and videos are available at: https://hucebot.github.io/seiko_controller_website/
Read more5/24/2024

0
Hierarchical World Models as Visual Whole-Body Humanoid Controllers
Nicklas Hansen, Jyothir S V, Vlad Sobal, Yann LeCun, Xiaolong Wang, Hao Su
Whole-body control for humanoids is challenging due to the high-dimensional nature of the problem, coupled with the inherent instability of a bipedal morphology. Learning from visual observations further exacerbates this difficulty. In this work, we explore highly data-driven approaches to visual whole-body humanoid control based on reinforcement learning, without any simplifying assumptions, reward design, or skill primitives. Specifically, we propose a hierarchical world model in which a high-level agent generates commands based on visual observations for a low-level agent to execute, both of which are trained with rewards. Our approach produces highly performant control policies in 8 tasks with a simulated 56-DoF humanoid, while synthesizing motions that are broadly preferred by humans. Code and videos: https://nicklashansen.com/rlpuppeteer
Read more6/3/2024
0
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
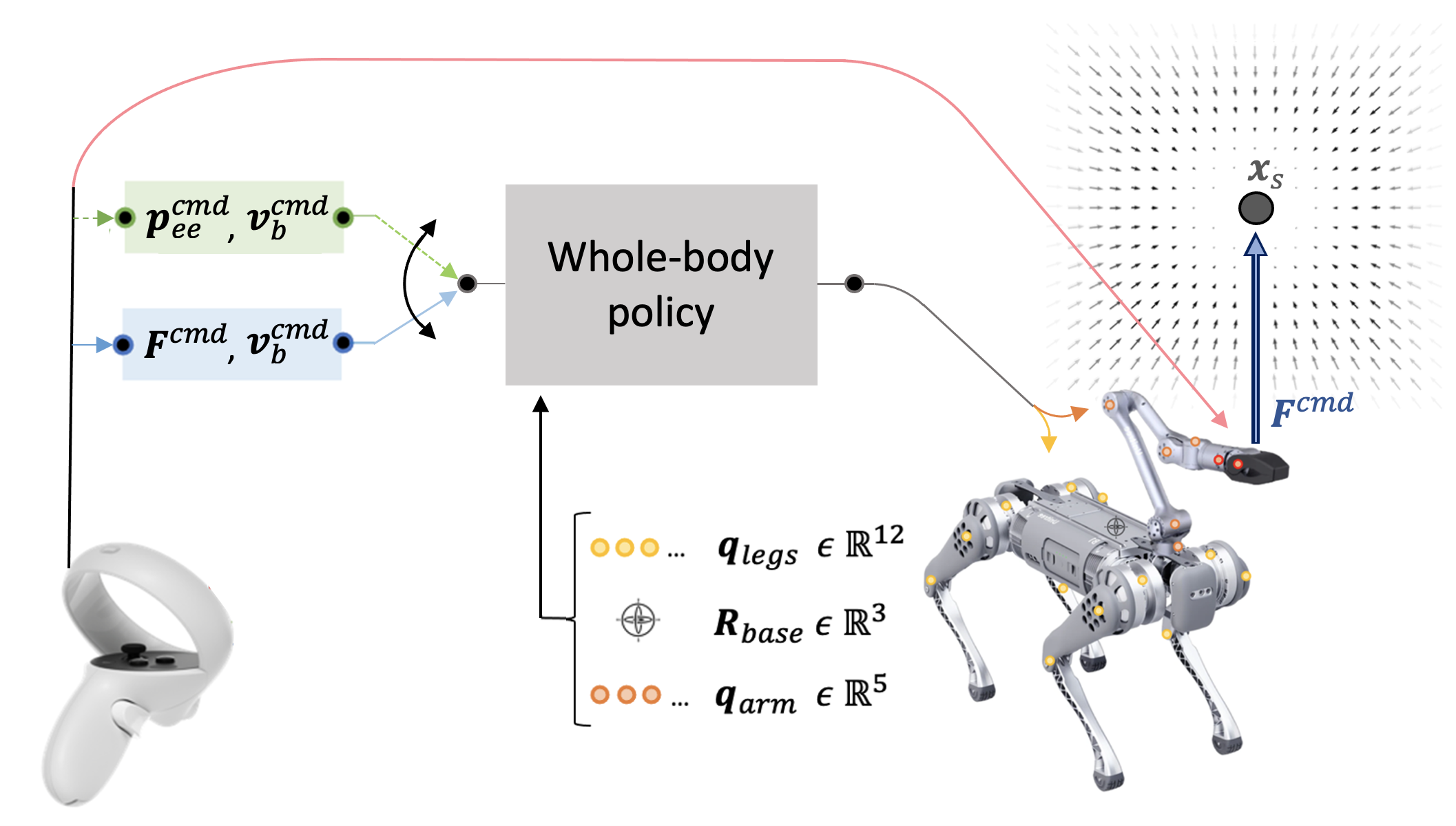
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
Read more5/21/2024