Zero-shot Safety Prediction for Autonomous Robots with Foundation World Models
2404.00462
0
0
Abstract
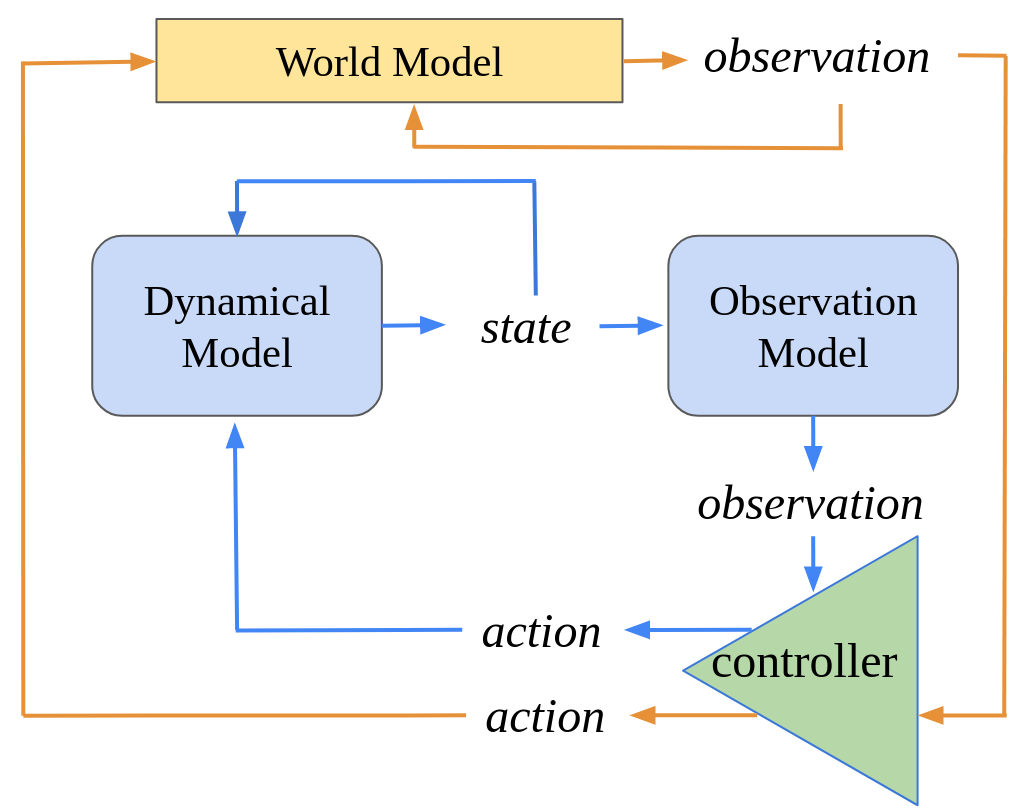
A world model creates a surrogate world to train a controller and predict safety violations by learning the internal dynamic model of systems. However, the existing world models rely solely on statistical learning of how observations change in response to actions, lacking precise quantification of how accurate the surrogate dynamics are, which poses a significant challenge in safety-critical systems. To address this challenge, we propose foundation world models that embed observations into meaningful and causally latent representations. This enables the surrogate dynamics to directly predict causal future states by leveraging a training-free large language model. In two common benchmarks, this novel model outperforms standard world models in the safety prediction task and has a performance comparable to supervised learning despite not using any data. We evaluate its performance with a more specialized and system-relevant metric by comparing estimated states instead of aggregating observation-wide error.
Create account to get full access
Overview
- The paper presents a novel approach to predicting the safety of autonomous robots using "foundation world models" - large language models trained on vast datasets to understand the physical and social world.
- The authors demonstrate that these models can be used to assess the safety of robot actions in a "zero-shot" manner, meaning the models can make safety predictions without any prior training on specific robot behaviors or environments.
- The key idea is to leverage the broad knowledge captured by these foundation models to reason about the potential safety implications of a robot's actions, without the need for specialized training.
Plain English Explanation
The paper explores a new way to help autonomous robots stay safe as they navigate the real world. Instead of training robots on every possible scenario they might encounter, the researchers show how large language models can be used to predict the safety of robot actions.
These language models are trained on massive amounts of data to build a broad understanding of the physical and social world. The researchers found they can use this general knowledge to assess whether a robot's planned actions are likely to be safe, without any prior training on that specific robot or environment.
Imagine you're teaching a robot to cook. Instead of training it on recipes and kitchen safety for every type of food, you could use a foundation model that already knows a lot about the world. The model could then evaluate whether the robot's cooking plans are safe - for example, warning if the robot plans to use a flammable ingredient near an open flame.
This "zero-shot" approach, where the safety assessment happens without specialized training, could make it much easier to deploy autonomous robots in the real world. The robots wouldn't need to be trained on every possible scenario ahead of time, which is a major challenge. Instead, they could leverage the broad knowledge captured in large language models to navigate safely.
Technical Explanation
The paper presents a framework for zero-shot safety prediction for autonomous robots using foundation world models. These are large language models trained on massive datasets to build broad understanding of the physical and social world.
The key idea is to leverage the knowledge encoded in these foundation models to assess the safety of a robot's planned actions, without requiring any prior training on the specific robot or environment. The authors propose a pipeline where the robot's planned actions are encoded as natural language and fed into the foundation model. The model then outputs a safety score reflecting the predicted risk or safety of the proposed actions.
The authors evaluate their approach on a range of simulated robot tasks, including navigation, manipulation, and social interaction. They find that the zero-shot safety predictions made by the foundation model align well with human safety assessments, and can outperform baseline safety models trained directly on robot data.
The foundation model's broad world knowledge allows it to reason about novel situations and potential safety issues that may not have been covered in the robot's training data. This zero-shot capability could greatly simplify the deployment of autonomous robots, by reducing the need for exhaustive prior training.
Critical Analysis
The paper makes a compelling case for using foundation world models to enable zero-shot safety prediction for autonomous robots. The results demonstrate the potential power of leveraging large-scale language models to reason about the safety implications of robot actions in a general, transferable way.
That said, the authors acknowledge several limitations and areas for future work. The evaluation is limited to simulated environments, so further research is needed to understand how the approach would perform in the real world with all its complexities. There are also open questions about the robustness and reliability of the safety assessments, especially for edge cases or adversarial inputs.
Additionally, the heavy reliance on language models raises concerns about potential biases and blindspots being encoded in the safety predictions. The authors note the need to carefully audit and debias the models, which is an area of active research.
Overall, this work represents an exciting step towards more capable and trustworthy autonomous robots. By shifting the burden of safety reasoning from specialized robot training to general world models, the approach holds promise to greatly simplify the deployment of robotic systems. However, significant further research will be needed to fully realize this potential.
Conclusion
This paper presents a novel framework for zero-shot safety prediction in autonomous robots, leveraging the broad knowledge captured by large foundation world models. By encoding planned robot actions as natural language and feeding them into these powerful language models, the approach can assess the safety of robot behaviors without any prior training on specific robots or environments.
The results demonstrate the potential of this approach to enable more capable and deployable autonomous systems, by reducing the need for exhaustive robot-specific training. As the authors note, significant further work is required to address limitations and realize the full promise of this technique. But this research represents an exciting step towards a future where robots can safely navigate the complexities of the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
World Models for Autonomous Driving: An Initial Survey
Yanchen Guan, Haicheng Liao, Zhenning Li, Jia Hu, Runze Yuan, Yunjian Li, Guohui Zhang, Chengzhong Xu
0
0
In the rapidly evolving landscape of autonomous driving, the capability to accurately predict future events and assess their implications is paramount for both safety and efficiency, critically aiding the decision-making process. World models have emerged as a transformative approach, enabling autonomous driving systems to synthesize and interpret vast amounts of sensor data, thereby predicting potential future scenarios and compensating for information gaps. This paper provides an initial review of the current state and prospective advancements of world models in autonomous driving, spanning their theoretical underpinnings, practical applications, and the ongoing research efforts aimed at overcoming existing limitations. Highlighting the significant role of world models in advancing autonomous driving technologies, this survey aspires to serve as a foundational reference for the research community, facilitating swift access to and comprehension of this burgeoning field, and inspiring continued innovation and exploration.
5/8/2024
🔮
How Safe Am I Given What I See? Calibrated Prediction of Safety Chances for Image-Controlled Autonomy
Zhenjiang Mao, Carson Sobolewski, Ivan Ruchkin
0
0
End-to-end learning has emerged as a major paradigm for developing autonomous systems. Unfortunately, with its performance and convenience comes an even greater challenge of safety assurance. A key factor of this challenge is the absence of the notion of a low-dimensional and interpretable dynamical state, around which traditional assurance methods revolve. Focusing on the online safety prediction problem, this paper proposes a configurable family of learning pipelines based on generative world models, which do not require low-dimensional states. To implement these pipelines, we overcome the challenges of learning safety-informed latent representations and missing safety labels under prediction-induced distribution shift. These pipelines come with statistical calibration guarantees on their safety chance predictions based on conformal prediction. We perform an extensive evaluation of the proposed learning pipelines on two case studies of image-controlled systems: a racing car and a cartpole.
6/21/2024

Enhancing End-to-End Autonomous Driving with Latent World Model
Yingyan Li, Lue Fan, Jiawei He, Yuqi Wang, Yuntao Chen, Zhaoxiang Zhang, Tieniu Tan
0
0
End-to-end autonomous driving has garnered widespread attention. Current end-to-end approaches largely rely on the supervision from perception tasks such as detection, tracking, and map segmentation to aid in learning scene representations. However, these methods require extensive annotations, hindering the data scalability. To address this challenge, we propose a novel self-supervised method to enhance end-to-end driving without the need for costly labels. Specifically, our framework textbf{LAW} uses a LAtent World model to predict future latent features based on the predicted ego actions and the latent feature of the current frame. The predicted latent features are supervised by the actually observed features in the future. This supervision jointly optimizes the latent feature learning and action prediction, which greatly enhances the driving performance. As a result, our approach achieves state-of-the-art performance in both open-loop and closed-loop benchmarks without costly annotations.
6/13/2024
🤿
Prospective Role of Foundation Models in Advancing Autonomous Vehicles
Jianhua Wu, Bingzhao Gao, Jincheng Gao, Jianhao Yu, Hongqing Chu, Qiankun Yu, Xun Gong, Yi Chang, H. Eric Tseng, Hong Chen, Jie Chen
0
0
With the development of artificial intelligence and breakthroughs in deep learning, large-scale Foundation Models (FMs), such as GPT, Sora, etc., have achieved remarkable results in many fields including natural language processing and computer vision. The application of FMs in autonomous driving holds considerable promise. For example, they can contribute to enhancing scene understanding and reasoning. By pre-training on rich linguistic and visual data, FMs can understand and interpret various elements in a driving scene, and provide cognitive reasoning to give linguistic and action instructions for driving decisions and planning. Furthermore, FMs can augment data based on the understanding of driving scenarios to provide feasible scenes of those rare occurrences in the long tail distribution that are unlikely to be encountered during routine driving and data collection. The enhancement can subsequently lead to improvement in the accuracy and reliability of autonomous driving systems. Another testament to the potential of FMs' applications lies in World Models, exemplified by the DREAMER series, which showcases the ability to comprehend physical laws and dynamics. Learning from massive data under the paradigm of self-supervised learning, World Model can generate unseen yet plausible driving environments, facilitating the enhancement in the prediction of road users' behaviors and the off-line training of driving strategies. In this paper, we synthesize the applications and future trends of FMs in autonomous driving. By utilizing the powerful capabilities of FMs, we strive to tackle the potential issues stemming from the long-tail distribution in autonomous driving, consequently advancing overall safety in this domain.
5/20/2024