Prospective Role of Foundation Models in Advancing Autonomous Vehicles
2405.02288
0
0
🤿
Abstract
With the development of artificial intelligence and breakthroughs in deep learning, large-scale Foundation Models (FMs), such as GPT, CLIP, etc., have achieved remarkable results in many fields including natural language processing and computer vision. The application of FMs in autonomous driving holds considerable promise. For example, they can contribute to enhance scene understanding and reasoning. By pre-training on rich linguistic and visual data, FMs can understand and interpret various elements in a driving scene, and provide cognitive reasoning to give linguistic and action commands for driving decisions and planning. Furthermore, FMs can augment data based on its understanding of driving scenarios to provide feasible scenes of those rare occurrences in the long tail distribution that are unlikely to be encountered during routine driving and data collection. The enhancement can subsequently lead to the improvement in the accuracy and reliability of autonomous driving systems. Another testament to the potential of FMs applications lies in the development of World Models, exemplified by the DREAMER series, which showcase the ability to comprehend physical laws and dynamics. Learning from massive data under the paradigm of self-supervised learning, World Model can generate unseen yet plausible driving environment, facilitating the enhancement in the prediction of road users behavior and the off-line training of driving strategies. In this paper, we synthesize the applications and future trends of FMs in autonomous driving. By utilizing the powerful capabilities of FMs, we strive to tackle the potential issues stemming from the long-tail distribution in autonomous driving, consequently advancing overall safety in this domain.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- The paper discusses the potential applications of large-scale Foundation Models (FMs) like GPT and CLIP in the domain of autonomous driving.
- FMs can enhance scene understanding, reasoning, and interpretation, contributing to improved driving decisions and planning.
- FMs can also generate plausible driving environments based on their understanding of physical laws and dynamics, facilitating the prediction of road user behavior and offline training of driving strategies.
Plain English Explanation
Artificial intelligence and deep learning have led to the development of large-scale Foundation Models (FMs), such as GPT and CLIP. These models have shown remarkable results in various fields, including natural language processing and computer vision.
The application of FMs in autonomous driving holds considerable promise. FMs can enhance the understanding and interpretation of driving scenes, allowing them to provide more accurate linguistic and action commands for driving decisions and planning. By pre-training on vast amounts of linguistic and visual data, FMs can "comprehend" the different elements in a driving environment and use this knowledge to make better decisions.
Moreover, FMs can generate plausible driving scenarios that may be rare or unlikely to occur during routine driving and data collection. This can help autonomous driving systems become more reliable and accurate, as they can be trained on a wider range of potential situations.
Another exciting development is the use of World Models, exemplified by the DREAMER series, which can learn physical laws and dynamics from large datasets. These models can generate unseen yet realistic driving environments, which can then be used to predict the behavior of other road users and train driving strategies offline, further enhancing the safety and capabilities of autonomous driving systems.
Technical Explanation
The paper explores the potential applications of Foundation Models (FMs) in the context of autonomous driving. FMs, such as GPT and CLIP, have demonstrated remarkable performance in various tasks, including natural language processing and computer vision.
The authors highlight how FMs can contribute to enhancing scene understanding and reasoning in autonomous driving. By pre-training on rich linguistic and visual data, FMs can understand and interpret the different elements in a driving scene, such as road infrastructure, traffic signals, and other road users. This understanding can then be used to provide more accurate linguistic and action commands for driving decisions and planning.
Furthermore, the paper discusses how FMs can augment data by generating plausible driving scenarios that may be rare or unlikely to occur during routine driving and data collection. This can help address the challenges posed by the long-tail distribution of driving situations, leading to improved accuracy and reliability of autonomous driving systems.
The authors also highlight the development of World Models, such as the DREAMER series, which can learn physical laws and dynamics from large datasets. These models can generate unseen yet realistic driving environments, facilitating the prediction of road user behavior and the offline training of driving strategies. This can contribute to the enhancement of overall safety in autonomous driving.
The paper synthesizes the applications and future trends of FMs in autonomous driving, emphasizing their potential to tackle issues stemming from the long-tail distribution of driving scenarios and advance the overall safety and reliability of autonomous driving systems.
Critical Analysis
The paper presents a compelling case for the application of Foundation Models (FMs) in autonomous driving, highlighting their ability to enhance scene understanding, reasoning, and generation of plausible driving scenarios. However, the paper does not delve into the potential limitations or challenges of this approach.
One area that could benefit from further exploration is the robustness and reliability of FMs in real-world driving conditions. While the paper mentions the potential to address the long-tail distribution of driving scenarios, it does not discuss the practical challenges of ensuring the accuracy and safety of FM-based autonomous driving systems in the face of the vast complexity and unpredictability of the real world.
Additionally, the paper could have addressed the potential ethical and societal implications of deploying FMs in autonomous driving, such as issues related to transparency, fairness, and accountability. As these models become more prevalent, it will be crucial to consider their impact on vulnerable road users and the broader implications for the deployment of autonomous vehicles.
Furthermore, the paper could have explored the technical and infrastructure challenges associated with the integration of FMs into autonomous driving systems, such as the computational and data requirements, as well as the implications for federated learning and model updates.
Overall, the paper provides a promising outlook on the potential of FMs in autonomous driving, but a more comprehensive discussion of the challenges and limitations would strengthen the analysis and better prepare the field for the practical deployment of these technologies.
Conclusion
The paper highlights the considerable promise of applying large-scale Foundation Models (FMs) in the domain of autonomous driving. FMs can enhance scene understanding, reasoning, and interpretation, leading to improved driving decisions and planning. Additionally, FMs can generate plausible driving environments based on their understanding of physical laws and dynamics, facilitating the prediction of road user behavior and the offline training of driving strategies.
By leveraging the powerful capabilities of FMs, the authors aim to address the potential issues stemming from the long-tail distribution of driving scenarios, ultimately advancing the overall safety and reliability of autonomous driving systems. This research represents an important step in the ongoing efforts to develop more capable and trustworthy autonomous driving technologies that can positively impact society.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
World Models for Autonomous Driving: An Initial Survey
Yanchen Guan, Haicheng Liao, Zhenning Li, Jia Hu, Runze Yuan, Yunjian Li, Guohui Zhang, Chengzhong Xu
0
0
In the rapidly evolving landscape of autonomous driving, the capability to accurately predict future events and assess their implications is paramount for both safety and efficiency, critically aiding the decision-making process. World models have emerged as a transformative approach, enabling autonomous driving systems to synthesize and interpret vast amounts of sensor data, thereby predicting potential future scenarios and compensating for information gaps. This paper provides an initial review of the current state and prospective advancements of world models in autonomous driving, spanning their theoretical underpinnings, practical applications, and the ongoing research efforts aimed at overcoming existing limitations. Highlighting the significant role of world models in advancing autonomous driving technologies, this survey aspires to serve as a foundational reference for the research community, facilitating swift access to and comprehension of this burgeoning field, and inspiring continued innovation and exploration.
5/8/2024
🌿
What Foundation Models can Bring for Robot Learning in Manipulation : A Survey
Dingzhe Li, Yixiang Jin, Yong A, Hongze Yu, Jun Shi, Xiaoshuai Hao, Peng Hao, Huaping Liu, Fuchun Sun, Bin Fang
0
0
The realization of universal robots is an ultimate goal of researchers. However, a key hurdle in achieving this goal lies in the robots' ability to manipulate objects in their unstructured surrounding environments according to different tasks. The learning-based approach is considered an effective way to address generalization. The impressive performance of foundation models in the fields of computer vision and natural language suggests the potential of embedding foundation models into manipulation tasks as a viable path toward achieving general manipulation capability. However, we believe achieving general manipulation capability requires an overarching framework akin to auto driving. This framework should encompass multiple functional modules, with different foundation models assuming distinct roles in facilitating general manipulation capability. This survey focuses on the contributions of foundation models to robot learning for manipulation. We propose a comprehensive framework and detail how foundation models can address challenges in each module of the framework. What's more, we examine current approaches, outline challenges, suggest future research directions, and identify potential risks associated with integrating foundation models into this domain.
4/30/2024
Open Challenges and Opportunities in Federated Foundation Models Towards Biomedical Healthcare
Xingyu Li, Lu Peng, Yuping Wang, Weihua Zhang
0
0
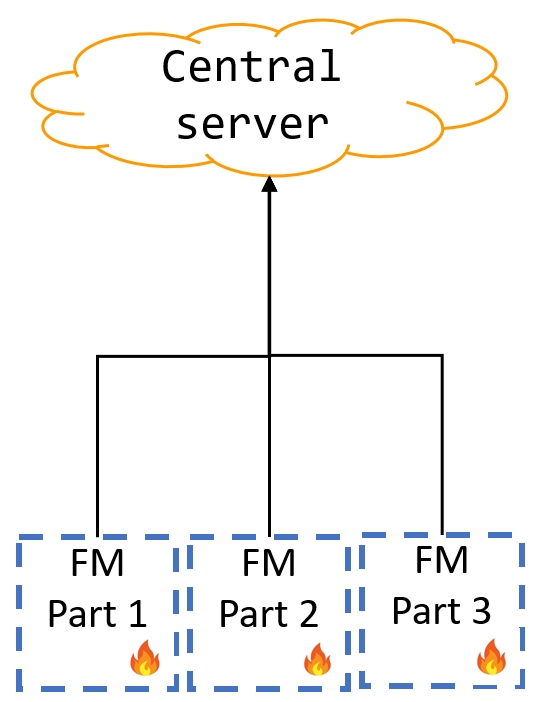
This survey explores the transformative impact of foundation models (FMs) in artificial intelligence, focusing on their integration with federated learning (FL) for advancing biomedical research. Foundation models such as ChatGPT, LLaMa, and CLIP, which are trained on vast datasets through methods including unsupervised pretraining, self-supervised learning, instructed fine-tuning, and reinforcement learning from human feedback, represent significant advancements in machine learning. These models, with their ability to generate coherent text and realistic images, are crucial for biomedical applications that require processing diverse data forms such as clinical reports, diagnostic images, and multimodal patient interactions. The incorporation of FL with these sophisticated models presents a promising strategy to harness their analytical power while safeguarding the privacy of sensitive medical data. This approach not only enhances the capabilities of FMs in medical diagnostics and personalized treatment but also addresses critical concerns about data privacy and security in healthcare. This survey reviews the current applications of FMs in federated settings, underscores the challenges, and identifies future research directions including scaling FMs, managing data diversity, and enhancing communication efficiency within FL frameworks. The objective is to encourage further research into the combined potential of FMs and FL, laying the groundwork for groundbreaking healthcare innovations.
5/14/2024
Zero-shot Safety Prediction for Autonomous Robots with Foundation World Models
Zhenjiang Mao, Siqi Dai, Yuang Geng, Ivan Ruchkin
0
0
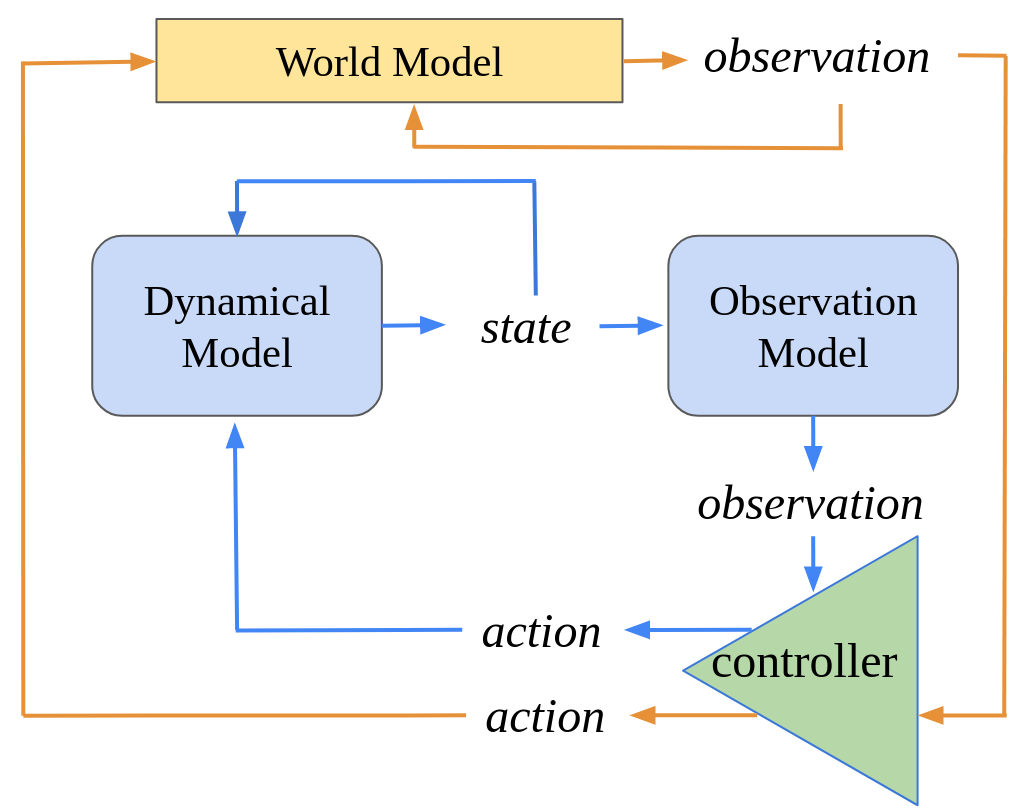
A world model creates a surrogate world to train a controller and predict safety violations by learning the internal dynamic model of systems. However, the existing world models rely solely on statistical learning of how observations change in response to actions, lacking precise quantification of how accurate the surrogate dynamics are, which poses a significant challenge in safety-critical systems. To address this challenge, we propose foundation world models that embed observations into meaningful and causally latent representations. This enables the surrogate dynamics to directly predict causal future states by leveraging a training-free large language model. In two common benchmarks, this novel model outperforms standard world models in the safety prediction task and has a performance comparable to supervised learning despite not using any data. We evaluate its performance with a more specialized and system-relevant metric by comparing estimated states instead of aggregating observation-wide error.
5/6/2024