1-Lipschitz Neural Distance Fields

0
🧠
Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
1-Lipschitz Neural Distance Fields
Guillaume Coiffier, Louis Bethune
Neural implicit surfaces are a promising tool for geometry processing that represent a solid object as the zero level set of a neural network. Usually trained to approximate a signed distance function of the considered object, these methods exhibit great visual fidelity and quality near the surface, yet their properties tend to degrade with distance, making geometrical queries hard to perform without the help of complex range analysis techniques. Based on recent advancements in Lipschitz neural networks, we introduce a new method for approximating the signed distance function of a given object. As our neural function is made 1- Lipschitz by construction, it cannot overestimate the distance, which guarantees robustness even far from the surface. Moreover, the 1-Lipschitz constraint allows us to use a different loss function, called the hinge-Kantorovitch-Rubinstein loss, which pushes the gradient as close to unit-norm as possible, thus reducing computation costs in iterative queries. As this loss function only needs a rough estimate of occupancy to be optimized, this means that the true distance function need not to be known. We are therefore able to compute neural implicit representations of even bad quality geometry such as noisy point clouds or triangle soups. We demonstrate that our methods is able to approximate the distance function of any closed or open surfaces or curves in the plane or in space, while still allowing sphere tracing or closest point projections to be performed robustly.
Read more7/16/2024

0
Implicit Filtering for Learning Neural Signed Distance Functions from 3D Point Clouds
Shengtao Li, Ge Gao, Yudong Liu, Ming Gu, Yu-Shen Liu
Neural signed distance functions (SDFs) have shown powerful ability in fitting the shape geometry. However, inferring continuous signed distance fields from discrete unoriented point clouds still remains a challenge. The neural network typically fits the shape with a rough surface and omits fine-grained geometric details such as shape edges and corners. In this paper, we propose a novel non-linear implicit filter to smooth the implicit field while preserving high-frequency geometry details. Our novelty lies in that we can filter the surface (zero level set) by the neighbor input points with gradients of the signed distance field. By moving the input raw point clouds along the gradient, our proposed implicit filtering can be extended to non-zero level sets to keep the promise consistency between different level sets, which consequently results in a better regularization of the zero level set. We conduct comprehensive experiments in surface reconstruction from objects and complex scene point clouds, the numerical and visual comparisons demonstrate our improvements over the state-of-the-art methods under the widely used benchmarks.
Read more9/11/2024
0
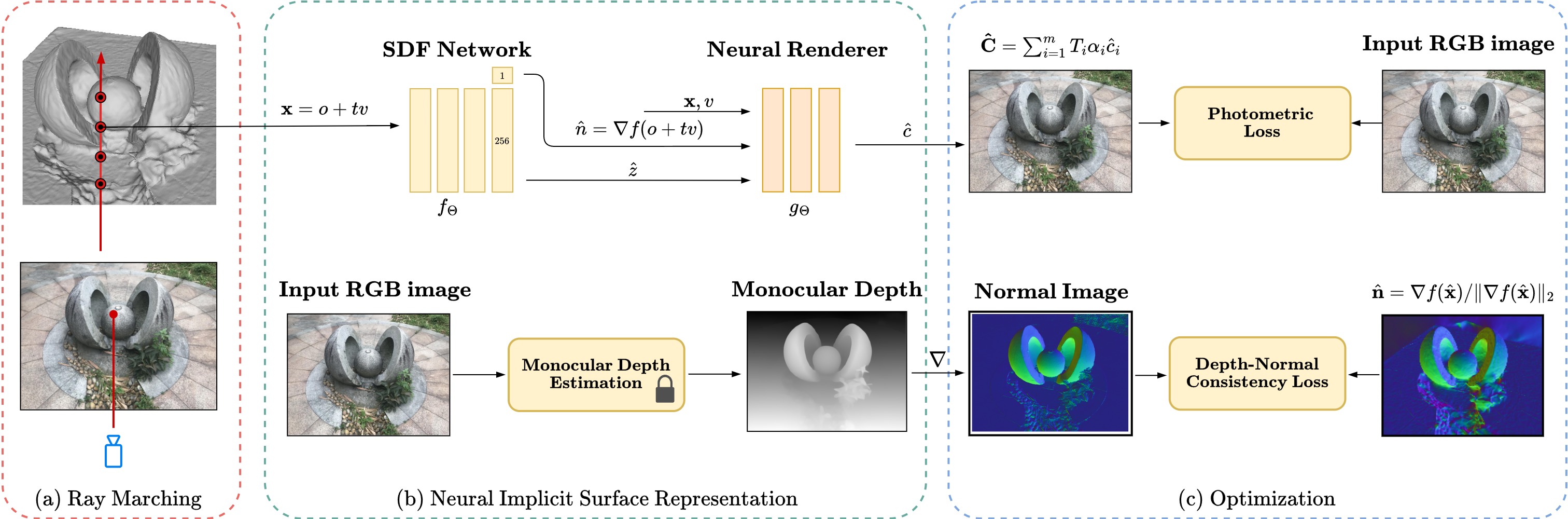
Normal-guided Detail-Preserving Neural Implicit Functions for High-Fidelity 3D Surface Reconstruction
Aarya Patel, Hamid Laga, Ojaswa Sharma
Neural implicit representations have emerged as a powerful paradigm for 3D reconstruction. However, despite their success, existing methods fail to capture fine geometric details and thin structures, especially in scenarios where only sparse RGB views of the objects of interest are available. We hypothesize that current methods for learning neural implicit representations from RGB or RGBD images produce 3D surfaces with missing parts and details because they only rely on 0-order differential properties, i.e. the 3D surface points and their projections, as supervisory signals. Such properties, however, do not capture the local 3D geometry around the points and also ignore the interactions between points. This paper demonstrates that training neural representations with first-order differential properties, i.e. surface normals, leads to highly accurate 3D surface reconstruction even in situations where only as few as two RGB (front and back) images are available. Given multiview RGB images of an object of interest, we first compute the approximate surface normals in the image space using the gradient of the depth maps produced using an off-the-shelf monocular depth estimator such as Depth Anything model. An implicit surface regressor is then trained using a loss function that enforces the first-order differential properties of the regressed surface to match those estimated from Depth Anything. Our extensive experiments on a wide range of real and synthetic datasets show that the proposed method achieves an unprecedented level of reconstruction accuracy even when using as few as two RGB views. The detailed ablation study also demonstrates that normal-based supervision plays a key role in this significant improvement in performance, enabling the 3D reconstruction of intricate geometric details and thin structures that were previously challenging to capture.
Read more6/10/2024
🌀
0
Online Learning of Continuous Signed Distance Fields Using Piecewise Polynomials
Ante Mari'c, Yiming Li, Sylvain Calinon
Reasoning about distance is indispensable for establishing or avoiding contact in manipulation tasks. To this end, we present an online approach for learning implicit representations of signed distance using piecewise polynomial basis functions. Starting from an arbitrary prior shape, our method incrementally constructs a continuous and smooth distance representation from incoming surface points, with analytical access to gradient information. The underlying model does not store training data for prediction, and its performance can be balanced through interpretable hyperparameters such as polynomial degree and number of segments. We assess the accuracy of the incrementally learned model on a set of household objects and compare it to neural network and Gaussian process counterparts. The utility of intermediate results and analytical gradients is further demonstrated in a physical experiment. For code and video, see https://sites.google.com/view/pp-sdf/.
Read more5/9/2024