Normal-guided Detail-Preserving Neural Implicit Functions for High-Fidelity 3D Surface Reconstruction

0
Sign in to get full access
Overview
- This paper proposes a novel neural implicit function approach for high-fidelity 3D surface reconstruction that preserves intricate surface details.
- The method leverages normal information to guide the neural implicit function, enabling it to capture fine-grained surface geometry.
- Experiments demonstrate the technique's ability to reconstruct complex 3D shapes with significantly higher accuracy compared to existing approaches.
Plain English Explanation
The paper introduces a new way to create highly detailed 3D models from data. Traditional 3D reconstruction methods often struggle to capture all the intricate surface details, resulting in models that look a bit smooth or simplified. This new approach uses information about the surface normals - the directions the surfaces are facing - to guide a neural network in learning the exact shape of the 3D object.
By incorporating this normal information, the neural network is better able to recreate the fine-grained details and complex geometry of the original 3D shape. The researchers show that their technique can produce 3D models that are significantly more accurate and true-to-life compared to other state-of-the-art methods. This could have important applications in areas like digital content creation, virtual reality, and medical imaging, where high-fidelity 3D models are crucial.
Technical Explanation
The key innovation in this paper is the use of a "normal-guided neural implicit function" to reconstruct 3D surfaces. Traditional neural implicit functions learn a continuous signed distance field (SDF) representation of the 3D shape from sparse point cloud data. However, this can lead to a loss of fine details.
The authors propose augmenting the neural implicit function with additional normal information, which is obtained from the input point cloud data. This "normal-guided detail-preserving neural implicit function" is then optimized to jointly fit the SDF and normal fields, enabling it to better capture intricate surface geometry.
Experiments on a variety of 3D shapes demonstrate that this approach significantly outperforms existing methods in terms of reconstruction accuracy, as measured by metrics like Chamfer distance. The technique is also shown to be robust to noise and varying sampling densities in the input data.
Critical Analysis
A key limitation of this work is that it relies on having access to accurate normal information, which may not always be available, especially for real-world sensor data like point clouds from airborne LiDAR. The authors acknowledge this and suggest exploring methods to estimate normals directly from the input data as a direction for future research.
Additionally, while the paper demonstrates impressive results on static 3D shapes, it's unclear how well the approach would generalize to dynamic or deformable objects. Extending the normal-guided implicit function to handle time-varying geometry could be an interesting area for further investigation.
Overall, this paper presents a compelling technique for high-fidelity 3D surface reconstruction that takes an important step towards bridging the gap between the level of detail captured in computer-generated 3D models and the complexity of real-world 3D shapes. The ideas introduced here could have broad applicability in areas like inverse neural rendering for multi-object tracking.
Conclusion
This paper introduces a novel neural implicit function approach that leverages normal information to enable high-fidelity 3D surface reconstruction with unprecedented levels of detail preservation. The key insight is that incorporating normal guidance into the neural network optimization allows it to better capture the intricate geometry of complex 3D shapes.
The experimental results demonstrate the technique's superior performance compared to existing methods, suggesting it could have significant impact in a wide range of applications where accurate 3D modeling is crucial, from digital content creation to medical imaging. While the approach has some limitations, the ideas presented here represent an important step forward in the field of 3D reconstruction and could inspire future research in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Normal-guided Detail-Preserving Neural Implicit Functions for High-Fidelity 3D Surface Reconstruction
Aarya Patel, Hamid Laga, Ojaswa Sharma
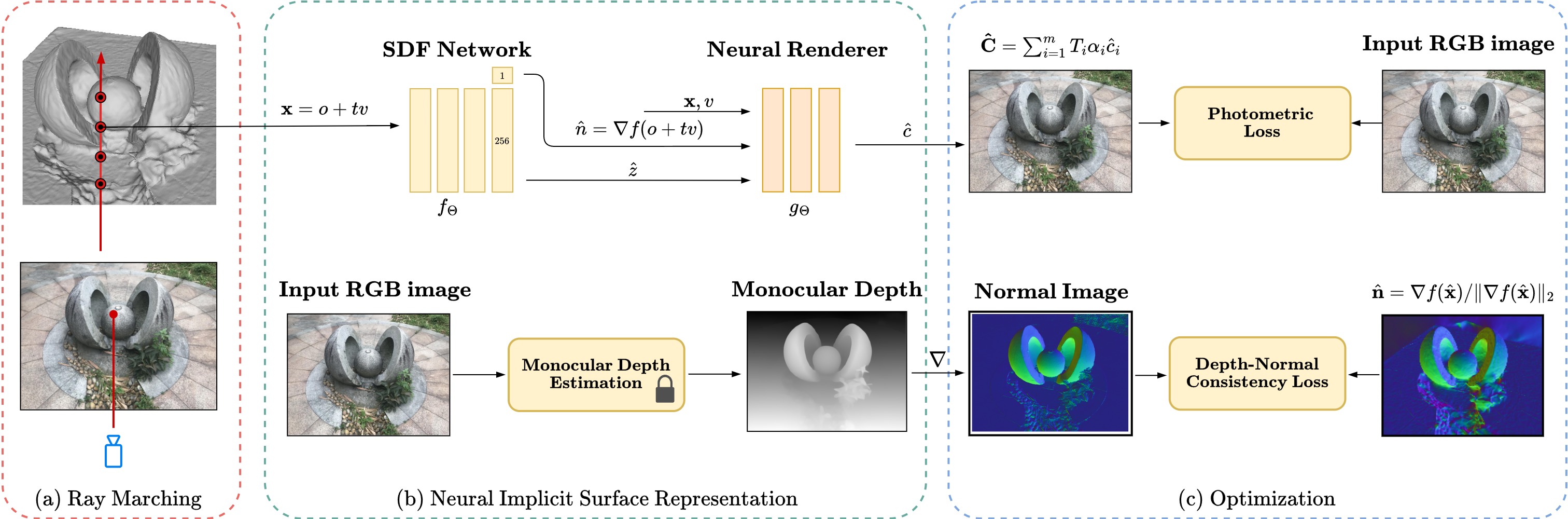
Neural implicit representations have emerged as a powerful paradigm for 3D reconstruction. However, despite their success, existing methods fail to capture fine geometric details and thin structures, especially in scenarios where only sparse RGB views of the objects of interest are available. We hypothesize that current methods for learning neural implicit representations from RGB or RGBD images produce 3D surfaces with missing parts and details because they only rely on 0-order differential properties, i.e. the 3D surface points and their projections, as supervisory signals. Such properties, however, do not capture the local 3D geometry around the points and also ignore the interactions between points. This paper demonstrates that training neural representations with first-order differential properties, i.e. surface normals, leads to highly accurate 3D surface reconstruction even in situations where only as few as two RGB (front and back) images are available. Given multiview RGB images of an object of interest, we first compute the approximate surface normals in the image space using the gradient of the depth maps produced using an off-the-shelf monocular depth estimator such as Depth Anything model. An implicit surface regressor is then trained using a loss function that enforces the first-order differential properties of the regressed surface to match those estimated from Depth Anything. Our extensive experiments on a wide range of real and synthetic datasets show that the proposed method achieves an unprecedented level of reconstruction accuracy even when using as few as two RGB views. The detailed ablation study also demonstrates that normal-based supervision plays a key role in this significant improvement in performance, enabling the 3D reconstruction of intricate geometric details and thin structures that were previously challenging to capture.
Read more6/10/2024
🧠
0
Enhancing Surface Neural Implicits with Curvature-Guided Sampling and Uncertainty-Augmented Representations
Lu Sang, Abhishek Saroha, Maolin Gao, Daniel Cremers
Neural implicit representations have become a popular choice for modeling surfaces due to their adaptability in resolution and support for complex topology. While previous works have achieved impressive reconstruction quality by training on ground truth point clouds or meshes, they often do not discuss the data acquisition and ignore the effect of input quality and sampling methods during reconstruction. In this paper, we introduce a method that directly digests depth images for the task of high-fidelity 3D reconstruction. To this end, a simple sampling strategy is proposed to generate highly effective training data, by incorporating differentiable geometric features computed directly based on the input depth images with only marginal computational cost. Due to its simplicity, our sampling strategy can be easily incorporated into diverse popular methods, allowing their training process to be more stable and efficient. Despite its simplicity, our method outperforms a range of both classical and learning-based baselines and demonstrates state-of-the-art results in both synthetic and real-world datasets.
Read more8/12/2024
🤷
0
Indoor Scene Reconstruction with Fine-Grained Details Using Hybrid Representation and Normal Prior Enhancement
Sheng Ye, Yubin Hu, Matthieu Lin, Yu-Hui Wen, Wang Zhao, Yong-Jin Liu, Wenping Wang
The reconstruction of indoor scenes from multi-view RGB images is challenging due to the coexistence of flat and texture-less regions alongside delicate and fine-grained regions. Recent methods leverage neural radiance fields aided by predicted surface normal priors to recover the scene geometry. These methods excel in producing complete and smooth results for floor and wall areas. However, they struggle to capture complex surfaces with high-frequency structures due to the inadequate neural representation and the inaccurately predicted normal priors. This work aims to reconstruct high-fidelity surfaces with fine-grained details by addressing the above limitations. To improve the capacity of the implicit representation, we propose a hybrid architecture to represent low-frequency and high-frequency regions separately. To enhance the normal priors, we introduce a simple yet effective image sharpening and denoising technique, coupled with a network that estimates the pixel-wise uncertainty of the predicted surface normal vectors. Identifying such uncertainty can prevent our model from being misled by unreliable surface normal supervisions that hinder the accurate reconstruction of intricate geometries. Experiments on the benchmark datasets show that our method outperforms existing methods in terms of reconstruction quality. Furthermore, the proposed method also generalizes well to real-world indoor scenarios captured by our hand-held mobile phones. Our code is publicly available at: https://github.com/yec22/Fine-Grained-Indoor-Recon.
Read more8/14/2024

0
VCR-GauS: View Consistent Depth-Normal Regularizer for Gaussian Surface Reconstruction
Hanlin Chen, Fangyin Wei, Chen Li, Tianxin Huang, Yunsong Wang, Gim Hee Lee
Although 3D Gaussian Splatting has been widely studied because of its realistic and efficient novel-view synthesis, it is still challenging to extract a high-quality surface from the point-based representation. Previous works improve the surface by incorporating geometric priors from the off-the-shelf normal estimator. However, there are two main limitations: 1) Supervising normal rendered from 3D Gaussians updates only the rotation parameter while neglecting other geometric parameters; 2) The inconsistency of predicted normal maps across multiple views may lead to severe reconstruction artifacts. In this paper, we propose a Depth-Normal regularizer that directly couples normal with other geometric parameters, leading to full updates of the geometric parameters from normal regularization. We further propose a confidence term to mitigate inconsistencies of normal predictions across multiple views. Moreover, we also introduce a densification and splitting strategy to regularize the size and distribution of 3D Gaussians for more accurate surface modeling. Compared with Gaussian-based baselines, experiments show that our approach obtains better reconstruction quality and maintains competitive appearance quality at faster training speed and 100+ FPS rendering. Our code will be made open-source upon paper acceptance.
Read more6/11/2024