1 Modular Parallel Manipulator for Long-Term Soft Robotic Data Collection

0

Sign in to get full access
Overview
- This paper presents a modular parallel manipulator designed for long-term data collection with soft robotic systems.
- The manipulator is a hybrid design that combines rigid and soft components, offering stable and precise control while maintaining compliance.
- The system is designed to enable extended periods of data collection from soft robotic experiments, a critical need for advancing the field of soft robotics.
Plain English Explanation
The researchers have developed a modular parallel manipulator that is well-suited for long-term data collection with soft robots. Soft robots are a promising technology, but they can be challenging to study because they often lack the stability and precision of traditional rigid robots.
This new manipulator solves that problem by combining rigid and soft components. It can provide the stable, precise control needed to collect high-quality data over extended periods, while still maintaining the compliance that is a key advantage of soft robots. This allows researchers to gather the large datasets that are crucial for advancing the field of soft robotics.
The modular design also makes the system flexible and adaptable to different experimental setups and soft robotic applications. Overall, this research represents an important step forward in enabling more robust and comprehensive data collection for soft robotics research.
Technical Explanation
The paper describes the design and implementation of a modular parallel manipulator intended for long-term data collection with soft robotic systems. The manipulator uses a hybrid architecture that combines rigid and soft components to achieve stable, precise control while maintaining compliance.
The hardware design features a parallel Stewart platform structure with six linear actuators. This provides six degrees of freedom to precisely position and orient the end-effector. The rigid links are complemented by soft, compliant joints that allow for safe interaction with soft robotic systems. The modular construction enables customization for different experimental setups and payloads.
The control system uses a combination of model-based and sensor-based approaches to achieve accurate end-effector positioning. This includes [object Object] inspired by human motor control strategies.
The researchers demonstrate the manipulator's capabilities through high-speed data collection experiments with a soft robotic gripper. The system was able to reliably operate for extended periods, gathering valuable sensor data to support soft robotics research and development.
Critical Analysis
The paper provides a compelling technical solution for a critical need in soft robotics research - the ability to conduct long-term, high-quality data collection. The hybrid rigid-soft design is a clever approach to balancing the competing requirements of stability, precision, and compliance.
One potential limitation is the complexity of the control system, which may require significant tuning and calibration to achieve optimal performance. The authors mention the need for further work on improving the robustness and adapability of the control algorithms.
Additionally, the current manipulator prototype is relatively large and bulky, which could limit its suitability for certain soft robotic applications. Exploring more compact and lightweight designs may be an area for future research.
Overall, this work represents an important advance in the tools and capabilities available for soft robotics researchers. By enabling more robust and comprehensive data collection, it has the potential to accelerate progress in this rapidly evolving field.
Conclusion
The modular parallel manipulator presented in this paper addresses a critical need in soft robotics research - the ability to conduct long-term data collection with high-quality, stable, and precise control.
The hybrid rigid-soft design strikes an effective balance, allowing the system to maintain the compliance advantages of soft robotics while providing the stability and precision required for reliable data gathering. The modular architecture also enables customization and adaptation to different experimental setups.
By enabling more robust and comprehensive data collection, this research represents an important step forward in advancing the field of soft robotics. The insights and capabilities gained from this work could support the development of increasingly sophisticated and capable soft robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
1 Modular Parallel Manipulator for Long-Term Soft Robotic Data Collection
Kiyn Chin, Carmel Majidi, Abhinav Gupta
Performing long-term experimentation or large-scale data collection for machine learning in the field of soft robotics is challenging, due to the hardware robustness and experimental flexibility required. In this work, we propose a modular parallel robotic manipulation platform suitable for such large-scale data collection and compatible with various soft-robotic fabrication methods. Considering the computational and theoretical difficulty of replicating the high-fidelity, faster-than-real-time simulations that enable large-scale data collection in rigid robotic systems, a robust soft-robotic hardware platform becomes a high priority development task for the field. The platform's modules consist of a pair of off-the-shelf electrical motors which actuate a customizable finger consisting of a compliant parallel structure. The parallel mechanism of the finger can be as simple as a single 3D-printed urethane or molded silicone bulk structure, due to the motors being able to fully actuate a passive structure. This design flexibility allows experimentation with soft mechanism varied geometries, bulk properties and surface properties. Additionally, while the parallel mechanism does not require separate electronics or additional parts, these can be included, and it can be constructed using multi-functional soft materials to study compatible soft sensors and actuators in the learning process. In this work, we validate the platform's ability to be used for policy gradient reinforcement learning directly on hardware in a benchmark 2D manipulation task. We additionally demonstrate compatibility with multiple fingers and characterize the design constraints for compatible extensions.
Read more9/6/2024

0
Design and Control of a Novel Six-Degree-of-Freedom Hybrid Robotic Arm
Yang Chen, Zhonghua Miao, Yuanyue Ge, Sen lin, Liping Chen, Ya Xiong
Robotic arms are key components in fruit-harvesting robots. In agricultural settings, conventional serial or parallel robotic arms often fall short in meeting the demands for a large workspace, rapid movement, enhanced capability of obstacle avoidance and affordability. This study proposes a novel hybrid six-degree-of-freedom (DoF) robotic arm that combines the advantages of parallel and serial mechanisms. Inspired by yoga, we designed two sliders capable of moving independently along a single rail, acting as two feet. These sliders are interconnected with linkages and a meshed-gear set, allowing the parallel mechanism to lower itself and perform a split to pass under obstacles. This unique feature allows the arm to avoid obstacles such as pipes, tables and beams typically found in greenhouses. Integrated with serially mounted joints, the patented hybrid arm is able to maintain the end's pose even when it moves with a mobile platform, facilitating fruit picking with the optimal pose in dynamic conditions. Moreover, the hybrid arm's workspace is substantially larger, being almost three times the volume of UR3 serial arms and fourteen times that of the ABB IRB parallel arms. Experiments show that the repeatability errors are 0.017 mm, 0.03 mm and 0.109 mm for the two sliders and the arm's end, respectively, providing sufficient precision for agricultural robots.
Read more7/30/2024

0
Design and Control of Modular Soft-Rigid Hybrid Manipulators with Self-Contact
Zach J. Patterson, Emily Sologuren, Cosimo Della Santina, Daniela Rus
Soft robotics focuses on designing robots with highly deformable materials, allowing them to adapt and operate safely and reliably in unstructured and variable environments. While soft robots offer increased compliance over rigid body robots, their payloads are limited, and they consume significant energy when operating against gravity in terrestrial environments. To address the carrying capacity limitation, we introduce a novel class of soft-rigid hybrid robot manipulators (SRH) that incorporates both soft continuum modules and rigid joints in a serial configuration. The SRH manipulators can seamlessly transition between being compliant and delicate to rigid and strong, achieving this through dynamic shape modulation and employing self-contact among rigid components to effectively form solid structures. We discuss the design and fabrication of SRH robots, and present a class of novel control algorithms for SRH systems. We propose a configuration space PD+ shape controller and a Cartesian impedance controller, both of which are provably stable, endowing the soft robot with the necessary low-level capabilities. We validate the controllers on SRH hardware and demonstrate the robot performing several tasks. Our results highlight the potential for the soft-rigid hybrid paradigm to produce robots that are both physically safe and effective at task performance.
Read more8/20/2024
0
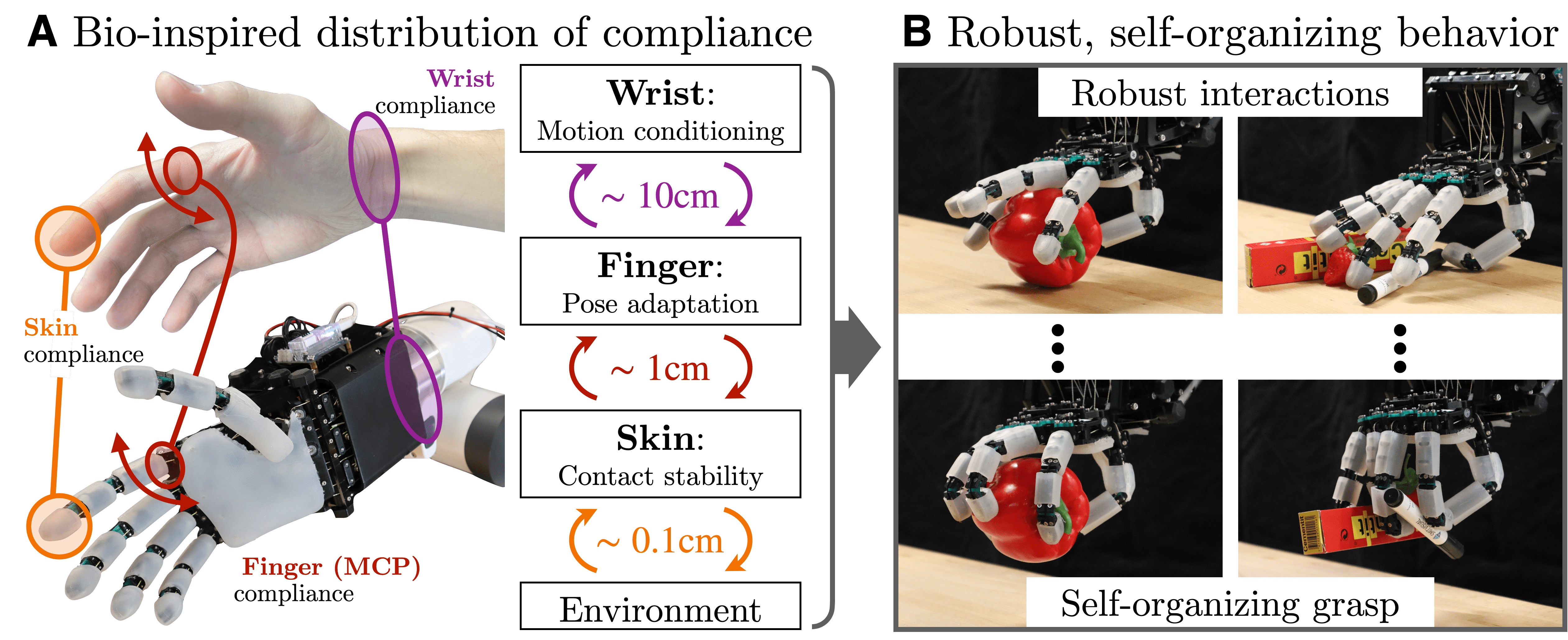
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Read more4/16/2024